
Fig: 1 OWI 535 Robotic Arm
It has five motions where each motion a DC motor is been used.Five motions are: Base Rotation, Base motion, Elbow Mo- tion, Wrist motion, and Gripper or end effector.






International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July-2013 445
ISSN 2229-5518
Voice Interfaced Arduino Robotic Arm for Object
Detection and Classification
Vishnu Prabhu S and Dr. Soman K.P
Abstract— Nowadays Robotics has a tremendous improvement in day to day life. But in real life interaction between humans and robot in various applications done manually through keyboards and also it is difficult to send a person inside hazardous environment like in chemical plant, bomb detection, etc. To overcome such problem robots can control or interfaced through voice commands which will be given by the person to control it in such environments. This paper is mainly focus on to control or interfaces the robotic arm by human’s voice commands to do a particular task that is to pick an object by detecting and classify it accordingly.
Index Terms— Robotic arm, Arduino, DC motors, H-Bridge, Pulse Width Modulatiion (PW M), Processing, Roborealm.
—————————— ——————————
obotics is advancing rapidly in all areas. Presently various Industries is moving from automation to robotization to increase productivity and also to deliver uniform quality.
Currently, everyone find substitues for himself to carry out his orders and also to work in a hostile environment. Robot and robot like manipulators are now commonly used in hos- tile environment, such as at various places like atomic plant, chemical plant, bomb detection areas, etc. One type of com- monly used manipulator in Industries for various applications is robotic arm also known as robotic manipulator.
In this paper, we focus on to control the robotic arm by voice commands which will be given by the user by Processing soft- ware where speech recognition system is been built. The com- mands passed through serial communication from Processing to Arduino and it sends it to Robotic arm to pick the object and object recognition taken place by Roborealm software for futher classification.
This paper is organized as follows. Section 2 gives a brief in- troduction about Robotic arm. Section 3 explains about Arduino role. Section 4 gives study of Processing. Section 5 explains about Roborealm Section 6 Implementation Section 7 Concludes the paper.
A Robotic arm has similar functions to a human arm. Here OWI 535 Robotic arm is been used for the process. It is an open or closed kinematic chain of rigid links interconnected by movable joints. The mechanical structure of a robotic manipu- lator consists of rigid bars called links and the links of a robot- ic arm are connected together to form a mechanical structure through joints.
————————————————
• Dr. Soman K.P Head of Cmputational Engineering and Networking in
Amrita University,Amrita School of Engineering-CoimbatoreTamil Nadu.
Fig: 1 OWI 535 Robotic Arm
It has five motions where each motion a DC motor is been used.Five motions are: Base Rotation, Base motion, Elbow Mo- tion, Wrist motion, and Gripper or end effector.
Fig: 2 Rotation Limits of each motion in Degrees
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July-2013 446
ISSN 2229-5518
As mentioned above all DC motors in robotic arm is controlled by H-bridges.It is an electronic device that allows the DC mo- tor to run forward and backward.Here L293D dual H-bridge motor driver integrated circuit (IC) is used, (i.e) two DC mo- tors can be driven simultaneously in both direction. So, totally three L293D IC’s are used for robotic arm.
Fig: 3 L293D H-bridge (IC)
Fig 4 shows the Circuit diagram to control DC motors with an
H-bridge (IC) is given below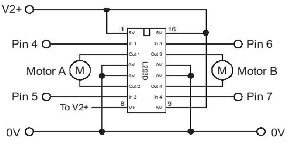
Fig: 4 Circuit diagram of L293D H-bridge (IC)
Arduino is an open source platform it is based on a simple microcontroller board and also it has an environment for writ- ing software for the board.
Major advantages of using Arduino are it is very inexpen- sive, clear programming, and it is an open source and extensi- ble software and hardware.
In this paper, Arduino Mega2560 is used. Fig 5 gives the
Specifications of Arduino Mega2560.
Fig 6 is the circuit board used for the work which it con- tains Arduino Mega2560 and L293D H-bridge’s
Fig: 6 Circuit Board
Pulse Width Modulation technique is been used, to control the speed of the DC motors and also to find the angle (i.e) how many rotations can a DC motor needs to reach a particular- point.
PWM gets analog results with digital means.Digital control are used to create a square wave, a signal switched between on and off. AnalogWrite () function which is used in the Ar- duino uses this technique to emulates an analog signal using digital pulses.PWM is on a scale of 0 – 255.
Fig: 7 Pulse Width Modulations
Fig 7 represents the Pulse width Modulation for four differ- ent scales (i.e) for 64, 127, 191, and 255 it gives rotation of DC motor they are as follows:
PWM is 0 0 degree of rotation. PWM is 63 90 degree of rotation. PWM is 127 180 degree of rotation. PWM is 191 270 degree of rotation. PWM is 255 360 degree of rotation.
Fig: 5 Arduino Mega2560 Specifications
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July-2013 447
ISSN 2229-5518
Processing is an open source programming language and it is useful in various environments like creating images, anima- tionas and for interactions. It is useful to talk with the Arduino and for display or save some data collected by arduino. It also works best for communicating simple information.
Interaction or speech processing with Robotic arm from us- er is takes place by Processing; it sends the commands through Arduino by Serial communication to Robotic arm.
Voce is a speech synthesis and recognition Library used in Processing for Speeech Processing. It is a cross platform, ac- cessible from JAVA and C++ .It uses CMU sphinx internally.
Sphinx4 and FreeTTS is the toolkit used to build the speech recognition system.
Fig: 8 Voce Architecture
Voce for speech recognition it uses sphinx4 microphone which it continuously listens for incoming audio data from the user’s audio hardware. Grammer file is used to define what is been recognized during the time of speech recognition and also these files are application specific.
Fig: 9 Scematic representation of Processing
Roborealm is an application used for various sources like image analysis, computer vision, also for robotic vision system by using USB webcam and a PC.
Roborealm is used for robot’s environment process for acquiring images and analyze what needs to be done and fi- nally it sents the information through serial communication to robotic arm by interfacing with Arduino.
The Proposed Methodlogy of this paper is given below in form of a schematic diagram
Fig: 10 Proposed Methodlogy
Before uploading the program we need to set the Board and
Serial port number correctly.
Fig: 11 Select the Arduino Board
F
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July-2013 448
ISSN 2229-5518

Fig: 12 Select the Serial Port
robotic arm to do the operations accordingly by the user’s
voice commands received by serial communication from Pro-
cessing.
Fig: 13 Upload the Program

Fig: 14 Run the Program in Processing

Fig: 15 Voice Commands given by User
Fig: 16 Robotic arm picks the object

Fig: 17 Rectangular object detected
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July-2013 449
ISSN 2229-5518

Fig: 18 Arduino program for object Classification

Fig: 19 VB_Script code to get COG_DENSITY
Fig: 20 Serial Communication from Roborealm to Arduino

Fig: 21 Robotic arm classify the object
Voice Interfaced Arduino Robotic arm for detecting the objects and also for classifying the objects is successfully implement- ed.In this paper we mainly focus on the shapes of the objects for detecting and classifying. In future, it can be further con- tinued for detecting the objects based on the color, shape de- formation.etc.
[1] K.Brahmani, K.s Roy, mahaboob Ali,” Arm 7 Based Robotic Arm Control by Electronic Gesture Recognition unit using Memes”, Inter- national Journal of Engineering Trends and Technology (IJETT)-Vol 4
Issue 4-April 2013.
[2] Shyam..R.Nair, Shalini.R.Nair, “Design of a Voice Controlled Robotic Arm for Picking & Placing an Object,” IOSR Journal of Engineering April 2012 Vol 2(4) pp: 670 – 673.K.
[3] Shyam..R.Nair, “Design of a Optically Controlled Robotic Arm for Picking & Placing an Object,” IOSR Journal of Engineering April 2012 .
[4] Amon Tunwannarux, Supanunt Tunwannarux, “Design of a 5-Joint Me- chanical Arm with User Friendly control Program” World Academy of Sci- ence, Engineering and Technology 27 2007.
[5] Md.Abdullah Al Ahasan, Md. Abdul Awal and Sheikh Shanawaz Mostafa, “Implementation of Speech Recognition based Robotic Sys- tem,” IJCIT Vol 1, Issue 02 2011.
[6] Brandi House, Jonathan Malkin, Jeff Bilmes, “The Voice Bot: A Voice
Controlled Robotic Arm," CHI 2009, April 4 -9 2009.
[7] BILMES, J., ET AL,”The Voice JoyStick: A Voice Based human- com- puter interface for individuals with motor impairments”. In Proc Human Language Tech/Epirical Methods in Natural Language Pro- cessing (Oct 2005), pp. 995 – 1002.
[8] IGARASHI, T., AND HUGHES.J,” Voice as sound:using non-verbal voice input for interactive control” ,In Proc UIST (2001) 155-156.
[9] Chin-Pao Hung, Wei-Guing Liu, Hong-Jhe Su, Jia-Wei Chen, and Bo-
Ming Chiu,”PIC-Based Multi-Channel PWM Signal Generation and Application to Motion Control of Six Feet Robot Toy”, International Journal of Circuits, Systems and Signal Processing Volume 3 Issue 2
2009.
[10] O.Dal Y, and O.Richard J,” Which PWM motor-control IC is best for your application” ,Motor System Design, vol 47 no 7 pp 22-30,2005.
IJSER © 2013 http://www.ijser.org