International Journal of Scientific & Engineering Research, Volume 5, Issue 3, March-2014 426
ISSN 2229-5518
Ultrasonic Visual Aid Using ANN
1 Manju Joseph, 2Meera Ajithkumar, 3Sahna Ashraf, 4Shyam G Nair 5 Ms. Sony N S
Abstract-In the present world of advanced technology and development, millions of people with sight problems lack a full and independent life. W e put forward a technological approach for helping the blind to lead a better life. The “ultrasonic visual aid using ANN” prototype is a small effective and wearable navigation aid for blind and visually impaired person. It functionally addresses global navigation for guiding the user to reach the destiny with the avoidance of static as well as moving obstacles, water pits, and transparent objects. The remarkable part of our work is to distinguish the profile of the obstacles using ANN training algorithm. The importance of our work arises since we are implementing a system which is capable of solving the problems faced by the blind just by using a set of ultrasonic sensor modules.
Index Terms- Ultrasonic Sensor, Neural network algorithms, Shape Recognition, Obstacle Detection, MATLAB, W ater Pit Detection
—————————— ——————————
The visual aid presented is based on ultrasonic techniques along with efficient neural network algorithm .Ultrasonic sensors offer great possibilities in this application since they have very suitable physical characteristics such as small size, Lightweight and robustness, which make them very suitable as a sensor of visual aid. along with, it provide properties such as low cost and capacity to work in environments which are hostile to other recognition techniques [1].
![]()
2*student, Department of Biomedical, Sahrdaya College Of Engineering & Technology, Thrissur-17, Kerala, India, Email: meera.ajitnair.com
5*Assistant Professor, Department of Biomedical, Sahrdaya
College Of Engineering & Technology,Thrissur-
17,Kerala,India,email:sony.sreedharan@gmail.com
The artificial neural networks are composed of a multitude of neurons, simple processing elements that operates in parallel. The network extracts the information from the training samples, this way it is able to synthetize implicitly a certain model of the problem .The capacity of the neural network to solve complex practical problems using a multitude of samples gives them a highly large potential of applicability [2].
In this work first, we acquired the ultrasonic signal and secondly, we have trained the neural network for object profile and shape detection with the help of MATLAB and have tested the system’s ability to learn to recognize objects at different distances and angles relative to the sonar. Along with detect the water pit, moving objects with the help of same ultrasonic sensor module itself. This feature will definitely help the blind people to lead a better life.
Ultrasonic Visual Aid Using ANN aims to bring out an innovative idea to make persons with visual disabilities to be self-reliant and confident. While many tools have been introduced to help address these problems using computer vision and other sensors their capabilities are dictated as much by the state-of-the-art in technology as they are by real human problems [3].
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 3, March-2014 427
ISSN 2229-5518
A deeper understanding of the questions that blind people would like to ask in their day-to-day lives may help to direct innovation to solve them. people with complete blindness or low vision often have a difficult time self-navigating outside well- known environments. In fact, physical movement is one of the biggest challenges for blind people, explains World Access for the Blind[4]. Traveling or simply walking down a crowded street may pose great difficulty. Because of this, many people with low vision will bring a sighted friend or family member to help navigate unknown environments. Blind people must learn every detail about the home environment [5].
Blindness causes considerable social challenges, usually in relation to the activities in which a blind person cannot participate. All too frequently, blindness affects a person's ability to perform many job duties, which severely limits her employment opportunities, explains the World Health Organization[6]. This may not only affect a person's finances, but also her self-esteem. Many of these social challenges limit a blind person's ability to meet people, and this only adds to low self- esteem The mental process of navigating an environment for a person who is totally blind is affected by the fact that they are unable to scan their surroundings visually.
In the physical world, navigating from one place to another means following a set of sequential steps. Studies such as these support the idea that usability is as important as accessibility. Because usability is specific to individual users’ needs, it is essential to understand the ways which people find it usable. This means that getting an interface designed for sighted people, and reading it out is simply not addressing these needs[7]. There are many technological aids that blind and visually impaired people can use . From the literature survey it is clear that, blind people are those who face many challenges in their daily life. So a technological approach is relevant in order to overcome their challenges. There are many possibility to guide the blind person, but usage of neural network is unique and at the same time i t will definitely improve the visual substitution.one of the biggest challenge in this work is the training of neural network with various shape.
The device aims at solving such hardships of blind people. The ULTRASONIC VISUAL AID USING ANN is a visual aid or assistance for the blind people to get through their day today life. Our project has three main features such as
• Obstacle detection
• Shape recognition
• Water pit detection
The device helps the blind to understand what is in front of the him. It helps them to move around through a crowd as well as through a road where vehicles are passing. A blind wearing this device as belt so they can easily understand that some obstacle is in front of him using the ultrasound sensors. Schematic representation of the proposed system is as shown in fig .1.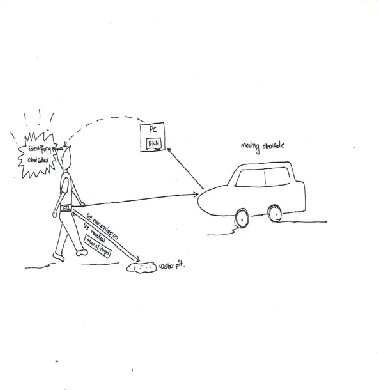
Fig .1.schematic diagram of system
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 3, March-2014 428
ISSN 2229-5518
The device is proposed the form of a belt which the blind is supposed to wear. It consists of ultrasound sensors and also a headphone attached to it. The sensor has both receiver and transmitter. The transmitter sends ultrasonic waves which hit the obstacle and the receiver receives the information. The sensor output is then given to the headphone to provide audile information to the blind whether the obstacle is moving or stationary, and shape and size of the obstacle that is determined using the artificial neural networks. Mathematical calculation that is based on time of fight calculation .These features helps a visually challenged person to navigate without using a blind stick safely even in crowded pathway. It helps him to stay away from water pits and can avoid accidents. It will improve the total system performance. The whole system works as shown in fig .2 .
As in the case with most neural networks, the aim is to train the network to achieve a balance between the network’s ability to respond and the ability to give a reasonable response to the input that is similar, but not identical to the one used in the training. Back propagation training takes place in 3 stages [9].
1. Feed forward of the input training pattern.
2. Back propagation of the MSE
3. Weight adjustment.
During feed forward, each input neuron receives an input a signal and give it to the each hidden neuron, which in turn computes the activation function and passes it on to its output unit, which again computes the activation value to obtain the net output. During training, the net output is compared with the target value and the appropriate error is calculated, from the error, the error factor is obtained which is used to distribute the error back to the hidden layer [10]. The weights are updated accordingly. The design flow of the feed forward back propagation network is as shown in fig 2 .Here, first we acquired the ultrasound value which is the object shape ,. Then by selecting the parameters required for neural network I.e., number of input layers, hidden layers and epochs, the network is trained.If the transfer function values of the input are similar to that of the transfer function values of known shape, then the training is stopped. Otherwise increase the number of epochs. By comparing the values of the log-sigmoidal transfer function, the system decides whether the input is present or not.
Fig 2 block diagram
One of the most difficult task in this work is the train the network with many number of signal that obtained from the ultrasonic sensor module.in the training period number of parameter that used for training the system in the sense it will
The algorithm that we have used in order to train
the device for various shapes is the ANN back propagation training [8]. The flow chart of the training procedure is as shown Fig 3.
definitely improve the system performance as like
normal human brain .actually this network system mimic normal neuronal activity.
1 mean square error-network performance function which measures the network’s performance according to mean of squared error
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 3, March-2014 429
ISSN 2229-5518

Using this visual aid we were able to recognize obstacles and also the geometrical shapes like triangle, circle and square .This was accomplished by training the system using neural networks. Along with this , information about water pit , moving or stationary obstacle is provided through the headphone.
We are planning to build a system that is 100% portable and user friendly by using mobile technology along with digital signal processors. Also train the system to analyze real object with minimum number of sensors by increasing the number of training samples.
A Neural Network based visual aid is proposed in this paper. This system performs geometric shape recognition at a very high degree of accuracy only because of good training with much number of samples. From our experiments, we found that the system is invariant to changes in environmental conditions. An ultrasonic module that used in this application also increased overall system performance.
We are very sure that we can help our society one by finding a solution to the blind peoples’ day to day problems and bringing them at power with the normal people, with the vivid features like obstacle and it’s profile throw the advanced ANN technique along with water pit detection. All this features provide with minimum cost, so it will help all the people in the society. Because of this our work will turn out to be the unique and be a remarkable one in this field seen so far.
Fig 3.Flow chart of neural network trainig
.
This work is included as the part of our curriculum activity B TECH Main project . This work was supported by biomedical department under the guidance of Sony N S.
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 3, March-2014 430
ISSN 2229-5518
[1]. w4x G. Lindstedt, G. Olsson, Using Ultrasonics for Sensing in a RoboticEnvironment, IEEE International Conference on Robotics and Au-tomation 3 _1993. 671–676.
[2]. Funahashi K. I., “On the approximate realization of continuous mappings by neural networks”, Neural Networks, Vol. 2, pp. 183-192, 1989.
[3]. J. Borenstein and Y. Koren. Obstacle avoidance with ultrasonic sensors. IEEE Journal of Robotics and Automation, RA-4:213–218, April1988.
[4] . w3x J.M. Martin Abreu, T. Freire Bastos, L. Caldero´n, Ultrasonic echoes from complex surfaces: an application to object recognition, Sensors
and Actuators A A31 _1992. 182–187.
[5]. w5x Canhui Cai, P.P.L. Regtien, A smart sonar object recognition system for robots, Measurement Science and Technology 4 _1993. 95–100.
[6] . F. van der Heijden, P.P.L. Regtien. "Wearable Navigation Assistance - A Tool for the Blind." Measurement Science Review, 2005.
[7]. Ahmed, Patricia, et al. (2007) ‘‘Internal and External
Ethnic Assessments in Eastern Europe,’’ 86 Social Forces
231–54
.
[8] .Brudka, M., and A. Pacut. 2002. Intelligent Robot Control Using Ultrasonic Measurements. IEEE Transactions on Instrumentation and Measurement 51(3):
454-459.
[9]. Bernard Windrow Michael A.Lehr.30 years of adaptive neural network: perceptron, madaline,and backpropagation.proceeding ofIEEE,78(9),September 1990
[10]. S. Anna Durai, and E. Anna Saro,”Image Compression with Back Propagation Neural Network using Cumulative Distribution Function” World Academy of Sciences, Engineering and Technology, 2006.
IJSER © 2014 http://www.ijser.org