2.
International Journal of Scientific & Engineering Research Volume 2, Issue 6, June-2011 1
ISSN 2229-5518
Speed Scheduling of Autonomous Railway
Vehicle Control System Using ANN
Nida Anwar, Muhammad Saleem Khan, Khalil Ahmed, Aiesha Ahmad and Atifa Athar
Abstract— This paper presents the artificial neural network base design approach for speed scheduling of autonomous railway vehicle control system the proposed system enhances the efficiency of vehicle under constraints and contributes in controlling issues, considering relative safety and operational requirements to avoid accidents. This design approach provides the vehicle’s speed management and scheduling under certain conditions: junction track information JTI, environment monitoring EM, vehicle tilting VT, track condition TC, track clearance TCL. The proposed system will be capable to full fill the needs of modern trends, to enhance the vehicle control automation system.
Index Terms— ANN, Autonomous Railway Vehicle System, Spped Scheduling
—————————— • ——————————
Owadays human factor plays a significant role in control of railway system in a whole and a rolling stock in particular. Over the last three decades rail-
way vehicle control technology is improving and in some countries it is being partially implemented. The modern technologies has reviewed the subject of Mechatronics and Electronics for the development of intelligent devices and controllers that have interfaces to work in global network, wireless networks and are programmed to use methods of artificial intelligence. Intelligent devices have possibilities to negotiate with each other and to coordi- nate their work to get better decisions. Some crashes with harmful outcomes happened in Latvia in the last three years. Main reason is the driver’s inattention passing the read signals. The task is to prevent such accidents by re- ducing the human factor [1]. The general benefits and features of control and monitoring for the railway and transportation vehicle are well understood.
The agent base technology is needed in Mechatronics to achieve flexible, network enabled collaboration between- centralized and distributed system for high level auto-
————————————————
• Nida Anwar is with Computer Science department as research fellow at NCBA&E Lahore, Pakistan. She is currently working as faculty member in VU, Lahore, Pakistan (e-mail: nidaanwar85@gmail.com).
• Dr. M. Saleem Khan is with the Computer Science Department as Direc- tor in GC University Lahore, Pakistan (e-mail: mskgcu@yahoo.com).
• Dr. Khalil Ahmed is with the School of Computer Science at NCBA&E Lahore, Pakistan; He is an expert academician and passionately engaged in research. (e-mail: drk@ncbae.edu.pk).
• Aiesha Ahmad is with Computer Science department as research fellow at
NCBA&E Lahore, Pakistan (e-mail: aiesha@ncbae.edu.pk).
• Atifa Athar is working as a faculty member at the School of Computer
Science, NCBA&E Lahore, Pakistan. She is a research fellow at SCS, NCBA&E (e-mail: atifaathar@yahoo.com).
nomous vehicle control [2]. Traditional ways of predict- ing railway safety are very expensive in term of time con- suming which make them inefficient under certain cir- cumstances. The advance concepts for monitoring and control of railway vehicle dynamics can provide better performance to facilitate speed scheduling and manage- ment. The proposed autonomous system gives solution for track condition with the acceptable ride quality over lower quality tracks, and tilting of trains around the track with speed adjustment [3]. The behavior of the train on the track at any time is not only affected by the state of the track at that time but also affected by the status of the track [4]. This leads us to include track parameters from some prior points as input to the neural network along with the parameters of the current point. Different neural network structures and techniques have already been created and tested to find the best structure for predicting railway safety [5]. The design model of multi-agents based autonomous railway vehicles control system has already been proposed that provides the vision of highly accurate system for autonomous control of railway ve- hicles, as that system is based on heavy information communication, therefore proper coding and filtering techniques need to be exercised [6]. The proposed system implements real time telemetry services for railway sys- tem using the information of equipment for rail, monitor- ing the signals of junction track information JTI, crossing gates, track condition TC, Track clearance TCL, environ- ment monitoring EM, vehicle tilting VT, on track vehicle to vehicle and between vehicle and main control informa- tion exchange this information is helpful for vehicle speed control and scheduling [7].
IJSER © 2011 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 6, June-2011 2
ISSN 2229-5518
The main innovation behind is to have the track irregular- ities as input and we can then predict to solve which part of the track is safe to use and which part is not. The true power of neural networks lies in their ability to represents both linear and non-linear relationships and their ability to learn these relationships directly from data being mod- eled. Another important feature of Neural Networks is in their intrinsic fault tolerance, even if some neurons fail, the network can perform well because knowledge is dis- tributed across all the elements of the network.
The frame work of this paper is: Section 2 describes the brief introduction of adaptive networks which includes fuzzy inference system (FIS) and Artificial Neural Net- work (ANN). Structure of proposed speed scheduling system is discussed in section 3, Section 4 describes the neural network based intelligent speed scheduling system and section 5 explains the design algorithm of the pro- posed system. Section 6 gives the results and discussion. Acknowledge of this work is mentioned in Section 7.
The fuzzy inference system is a popular computing frame work based on the concept of fuzzy set theory, fuzzy if- then rules, and fuzzy reasoning. It has been successfully applied in fields such as automatic control, data classifica- tion, decision analysis, expert system and vision, because of its multi-disciplinary nature, the fuzzy inference sys- tem is known by a number of names such as “fuzzy-rule- base system”, “Fuzzy Expert system”[8]. The basic struc- ture of a fuzzy inference system consists of three concep- tual components: a rule base which contains selection of fuzzy rules a database or dictionary, which defines the membership function used in fuzzy rules, and a reason- ing mechanism, which perform the inference procedure upon the rules and a given condition to derive a reasona- ble output or conclusion. The actual purpose of fuzzy inference is mapping of input to a given output by using fuzzy logic that provides the base for better, quicker and more accurate decisions/output (s) as compared to tradi- tional approach. Fuzzy inference system is not only capa- ble to deal with knowledge in linguistic rules from hu- man experts but also improve performance by adapting itself using numeric data [9].
This section describes the architecture and learning pro- cedures of adaptive networks, which are a super set of all kind of neural networks with supervised learning capa- bilities. As the name implies adaptive network is a net- work structure whose overall input-output behavior is determined by the values of a collection of modifiable parameters. More specifically, the configuration of an
adaptive network is composed of a set of nodes connected through directed links, where each node is a process unit that performs a static node function on its incoming sig- nals to generate a single node output and each link speci- fies the direction of signal flow from one node to another. Usually a node function is a parameterized function with modifiable parameters; by changing these parameters, we are actually changing the node function as well as the overall behavior of the adaptive network. The data set is usually called the training data set and the procedure we follow in adjusting the parameters to improve the per- formance of the network is known as learning rules [8]. Many NN models and learning algorithms have been proposed. Typical network structures include feedback and feed-forward NNs. Learning algorithms are catego- rized into supervised learning and unsupervised learning [10].
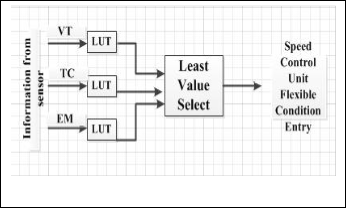
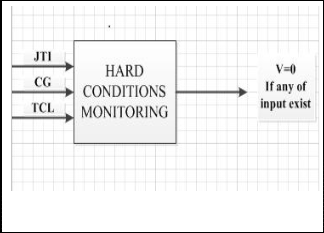
The development to enhance the capabilities of the train control system is under progress at various platforms. The proposed system is based on: the starting station, initial time, complete root chart loading with all the utili- ties, observations; junction track change information JTI, crossing gate information CG, track clearance TCL, track condition TC, environment monitoring EM, vehicle tilting VT, request from non-stop stations, vehicle to vehicle, and from vehicle to control room communication facilities, autonomous decisions and operations. All this informa- tion is help full for scheduling and controlling vehicle speed. Junction track information JTI, crossing gate in- formation CG, and track clearance TCL are the hard con- ditions, in the presence of anyone of them makes the ve- hicle to stop. Fig. 1 shows flexible conditions: VT, TC and EM for speed scheduling system. The hard conditions: JTI, CG and TCL for speed scheduling are shown in Fig.
2.
Fig.1. Flexible Conditions for Speed Scheduling System
IJSER © 2011 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 6, June-2011 3
ISSN 2229-5518
scheduling control unit are shown in Fig. 3.
Fig.2. Hard Conditions for Speed Scheduling System
For vehicular traffic control on a track or on adjacent tracks joining at junction, conditions for normal traffic or rear-end collision must be examined. A mathematical modular approach is used for the safe vehicle speed ad- justment to reduce any time delay due to any reason i.e. hard or flexible conditions in the journey [6]. The charac- teristics of mathematical formulation for normal vehicle traffic encountered in practice are proposed for proper speed control and adjustment. The possible ways to in- crease the speed and improve the synchronization of trains are required to be adopted for the stability of net- works [11]. This model has the capacity through its speed scheduling unit to include the consideration about ran- dom delays of trains and the propagation of delay across the network.
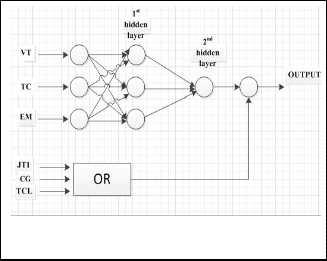
The proposed structure of speed control system is com- posed of 3 layers: input layer, hidden layer and the out- put layer. The input data is presented to the input layer that is connected with the hidden layer; and the last hid- den layer is connected to the output layer. In each layer each is neuron is independent of each other and the weights between each layer represents the knowledge of ANN. ANN get these weights by training which means that ANN must be trained before it contains useful know- ledge. In the proposed structure neural network get trained by flexible conditions that will control the speed of the vehicle and these flexible conditions door function with hard conditions i.e. if any one of the hard condition get occur will make the vehicle to stop. Fig.4 shows the NNW based proposed structure of railway vehicle speed control system. This training of neurons will be helpful in future when the same condition occurs. Control part of rolling stock is represented as neural network mathemati- cal model.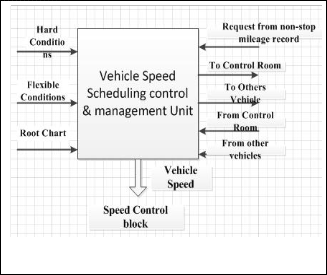
Fig.4. Neural Network Base Proposed Structure of Railway Ve- hicle Control System.
Input data set for neural network:
Fig.3. Block Diagram of Speed Scheduling Control Unit
This discussion shows that the final speed adjustment in these types of special cases requires the information ex- change between vehicles in automation, and another op- tion proposed to be used is to post the sensors at the front end or the rear end of the train to collect the information for speed estimation. The inputs and outputs for speed![]()
ANN had hidden layers:![]()
![]()
Neural network output:
IJSER © 2011 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 6, June-2011 4
ISSN 2229-5518
Weights for each input of ith neuron of jth layer:![]()
Bias for each i-th neuron of j-th layer: bi j;
Input summation function for each i-th neuron of j-th layer:![]()
This system is designed for two input variables: that are
Hard Conditions and the Soft conditions. Hard
TABLE 1
RANGES OF FLEXIBLE HARD CONDITIONS
MEMBERSHIP FUNCTIONS
Conditions consists of further three input variables i.e. JTI, CG, TCL, occurrence of any one of them makes the railway vehicle to stop, whereas Soft Conditions are Vehicle Tilting (VT), Track Condition (TC) and Environment Monitoring (EM) are used for controlling and adjustment of railway vehicle speed in km/h.
Table-1 and Table-2 show the specified ranges for the
TABLE 2
RANGES OF OUTPUT VARIABLE
MEMBERSHIP FUNCTIONS
adjustment of final speed according to the input parameter ranges and their respective memebership function.
For neural network based vehicle control system shown in Fig.4, controlling part of rolling stock contain 10 neu- rons in the hidden layer that gives the adjusted speed of the vehicle. Back propagation neural network technique is being used; the term back propagation refers to the way the learning procedure is being performed, i.e. by propa- gating gradient information from the network’s outputs to its inputs. Each node in such network has the same node function, that is the combination of linear and sig- moidal function and the network is trained by using the Levenberg Marquardt algorithm. trainlm is a network training function that updates weight and bias values according to Levenberg-Marquardt optimization. Trainlm is often the fastest back propagation algorithm and is highly recommended as a first-choice supervised algo- rithm. ANN controller takes input from the sensor and its outputs adjusted speed signals from actuators. The cen- tral part of the learning rule for adaptive network con- cerns how to recursively obtain a gradient vector in which each element is defined as the derivative and error measure with respect to parameter i.e. change in the input parameter will make changes in the related output node containing specified input parameter, until the error rate is not equal to zero, zero error rate means that network is able to adapt itself according to the input parameters and is able to produce exactly the desired output vector in the training data pair. As such method is generally referred to as “Back Propagation Learning Rule” because the gra-
IJSER © 2011 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 6, June-2011 5
ISSN 2229-5518
dient vector is calculated in the opposite direction to the flow of output signal.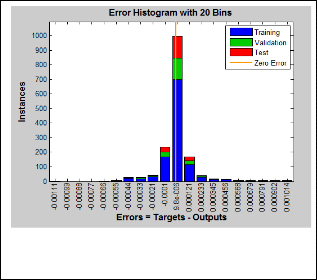
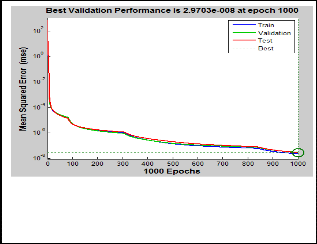
Fig.7 The best validation perormance graph of the network with repect to mean square error that is minimun after 1000 epoch
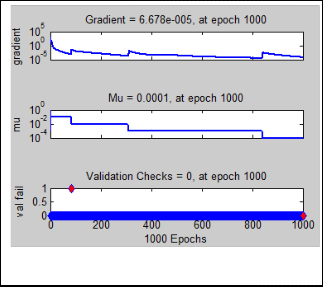
Fig.5 Error histogram shows the mimum error rate after training, validating and testing the data set
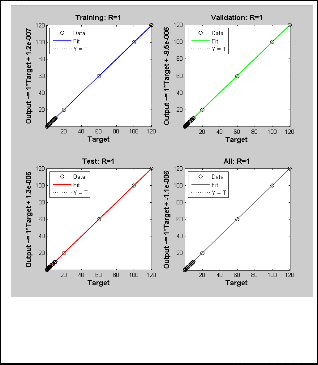
Fig.8 Training state of the network with gradient vector
Fig.6 Regression graph of training, validating and testing of data set with respect to the target output
After doing the MATLAB simulations on data set the results have been generated. Fig. 5 shows error histogram graph of minum errors at the training, validation and testing stages which is 2.26038e-8, 2.97033e-8and
2.86677e-8 respectively with repect to the target/output and instances.
Regression Graph shows the closeness between input and the output parametrs. Fig.6 show the regression graphs of data training ,its validation and testing, indivisualy and altogether results are shown in one separate graph. Data is best validated at 1000th epoch with repect to minimum means square error that is given in Fig. 7. Fig.8 explaines overall training state of the network with minimum gradient vector.
This work provides the vision of flexible architecture for the autonomous control of railway vehicle. The main ob- jective of this paper is to develop ANN that is capable of predicting safety measurements of trains on railway track. The experimental results shows that input data is
IJSER © 2011 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 6, June-2011 6
ISSN 2229-5518
get trained, validate and tested and able to predict the desired output with very low error. Minimum error rate shows that predictive cautions can be taken to minimize the accidents; ANN can be used as tool in taking deci- sions. Errors can be minimized but not eliminated. The hardware for speed scheduling and management system can be developed in future using FPGAs based Microelec- tronics chips to provide the state of the art solution for this autonomous real time control system.
The design and simulation work was carried out at the laboratories of Computer Sciences and Advanced Elec- tronics at GC University Lahore, Pakistan and NCBA&E, Lahore, Pakistan we must acknowledge the support of fellows of research group and laboratories persons for their sympathetic and encouraging behavior.
[1] Mikihail Gorobetz, l. R. (2009). Method of Accidents Prevention using Intellegent Control system for Railway Transports.Proceedingd of the 6th International Scientific Conference TRANSBALTICA 2009.
[2] R.Harrison, S. (2006). Reconfigurable modular automation system for automotive. Springer Science 1 March 2007, 175-190.
[3] Stefano Bruni, T. (2007). Control and Monitoring for Railway vehicle
Dynamics. 45, 743-779.
[4] L.Vulliet, F. a. (2002). Neural Networks for slope movement prediction. International Journal of Geomechanics, 153-173.
[5] S.Nefti, M. (2004). A Neural Network approach for Railway safety Rediction. IEEE international Conference on systems, Man and cybernetics.
[6] M. Saleem Khan and Khaled Benkrid” Design Model of Multi- Agents Based Autonomous Railway Vehicles Control System” Lecture Notes in Engineering and Computer Science Vol. 2175
2009, p.p. 1260-1265.
[7] Ben Schiller. (2008). Model approach to Running a Railway".
[8] JYH-Shing Roger Jang, C.-T. S. (1995). Neuro Fuzzy Modelling and
Control. Proceeding of IEEE.
[9] Maaref, K. M. (2009). "INTELLIGENT CONTROL FOR A DRONE BY SELF-TUNABLE FUZZY INFERENCE SYSTEM". 6th int. Multi-conference on Systems, Signals and Devices,IEEE,.
[10] TAKAGI, H. (1997). Introduction to Fuzzy Systems, Neural Networks, and Genetic Algorithms. Kluwer Academic Publishers, Norwell,Massachusetts, USA, 1-33.
[11] Funke, O. . (2004). Analysis stability and investment in railway networks using advance evolutionary algorithms. Int. Trans.Oper.Res, 381.
IJSER © 2011 http://www.ijser.org