Fig1. PRODUCT DESIGN
International Journal of Scientific & Engineering Research, Volume 6, Issue 5, May-2015
ISSN 2229-5518
Smart System for Personal Assistance in
Physiotherapy
Vedant Killa, Yomi Karthik R
—————————— ——————————
108
xercises performed in the correct posture and with the desired number of repetition cycles yield better results. In today’s times, machines and equipments cater to one
end of the spectrum for a certain level of severe cases. On the small scale end, people rely on intuition and basic human counting to perform the exercises. Physiotherapists can guide and instruct the patients only on several occasions. It is not possible for them to be present physically near the patients and monitor their exercise patterns at all times. As human er- ror cannot be avoided, patients often do not perform the exer- cises quite perfectly, and this remains unnoticed. This problem is well avoided if a wearable device is introduced to them that instructs and monitors their body motion.
The initial calibration and settings are fed in by a supervising doctor. The basic exercise pattern is recorded in a smart way and makes it easier for the doctor. As and when the person performs a set of exercises, a mobile application linked to the sensor unit intimates the doctor about the same. As the device is pre-programmed with specifications needed to perform the exercise, it does not count the sub-standard ones as valid. The various plausible reasons for a faulty movement can involve excessive bending, non-synchronized movement of limbs, speed alteration and even incoherent maintenance of the count. These issues are handled by the smart device worn by the patients. It facilitates communication and sends regular reports to the concerned doctor. In addition, the device allows room for flexibility with customized settings and scheduling of new exercises. The main objective of this device is to pro- vide personal assistance to patients at all times making use of present day modern technology.
————————————————
Yomi Karthik R is currently pursuing Bachelor’s degree program in Elec- tronics and Communication Engineering in Vellore Institute of Technolo-
gy, Vellore, India, PH-+919790203799. E-mail: yomikarthik@gmail.com
100m. The key features of Bluetooth communication are low
cost, low power consumption and lesser interference. The pre- requisite for data exchange is pairing of the devices which authenticate the connection. Information can be exchanged only between paired devices. A unique characteristic of Blu- etooth wireless technology is the ability to simultaneously handle data and voice transmissions. It provides users with a variety of innovative solutions such as hands-free headsets for voice calls, printing and synchronization for various gadgets.
IJSER © 2015
International Journal of Scientific & Engineering Research Volume 6, Issue śǰȱ ¢-2015
ISSN 2229-5518
109
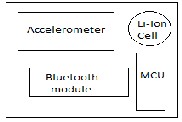
Product Design: This wearable device includes an embedded setup, mounted on an elastic band. The elastic band helps in flexibility of the device, making it easier to be worn by differ- ent people in different parts of the body. The electronic com- ponents used in this device are as follows:
Atmel. It is a 8-bit AVR RISC-based microcontroller combined
32 KB ISP flash memory with read-while-write capabilities,
1 KB EEPROM, 2 KB SRAM, 23 general purpose I/O lines, 32
general purpose working registers, three flexible ti- mer/counters with compare modes, internal and exter- nal interrupts, serial programmable USART, a byte-oriented 2- wire serial interface, SPI serial port, 6-channel 10-bit converter. The device operates between 1.8-5.5 volts. In this device, both the accelerometer and the Bluetooth module are interfaced to the ATmega328 chip. Hence the data received by the accele- rometer is given to the ATmega328 chip, which in turn sends it over Bluetooth to the user’s smartphone.
3.4 Li-Ion Rechargeable Button Cells (Power Source): Rechargea- ble Li-Ion cells of capacity 3.6V are being used, in order to power up the ATmega328 chip. The portable device consists of an external switch, used for switching on/off the power supply from these cells.
Fig1. PRODUCT DESIGN
Initially, the calibration is done by the physiotherapist involv- ing an easy two-step process. The information relating to the body movements is fed into the application and the device can be used by the patient. It is stranded to the patient’s hand and the power switch is turned on. Hand position is held idle for two seconds, so that the accelerometer achieves a stable state (x=0, y=0). The main objective of the device is to monitor two things:
1) The speed at which the exercise (hand movement) is being done.
2) The direction of the hand movement
Speed is calculated using the following formulae:
Up Speed = Present height (y) – Stable state (0)
-----------------------------------------------
Time taken
The timer is reset every time the accelerometer reaches the maximum height(Y).
Down Speed = Maximum height (Y) – Present height(y)
-------------------------------------------------
Time taken
When the patient is moving his hand from the stable state to the required height (maximum height, Y) as per the physio- therapist’s advice, the device keeps a constant on the speed at which the exercise is being performed. Likewise, the direction or angle at which the hand movement is carried out is also recorded by taking into consideration data from both the x and y parameters received by the accelerometer. This data is sent continuously to the ATmega328 chip from the accelero- meter, which in turn sends it via Bluetooth to a paired smart- phone. The smartphone consists of an application which
IJSER © 2015
International Journal of Scientific & Engineering Research Volume 6, Issue śǰȱ ¢-2015
ISSN 2229-5518
110
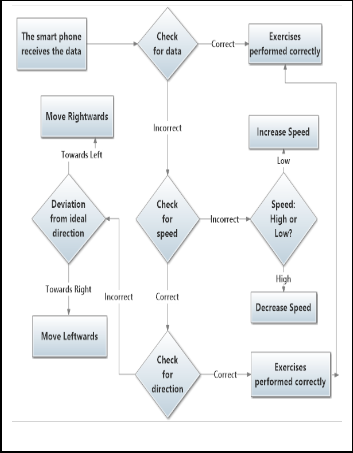
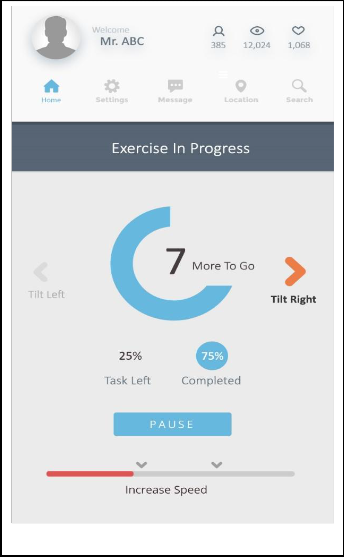
processes the received data. The information received will include the speed as well as the direction at which the arm is moved while performing the exercise. These observations are indicated in two segments of the application. The upper half of the application interface indicates the progress and main- tains a count of the performance. Additionally, it also guides the users to adjust their movements according to the required angle. This is pictorially illustrated using arrow marks for the respective directions with an accompanying text message aid- ing the users’ convenience. A variable bar displays the range of the desired speed with a specific color code.
Green indicates that the movement is in accordance with the physiotherapist’s advice, while red indicates that the speed needs to be modified. A pause button is also introduced to enable the users to resume exercises after unprecedented in- terruptions in their routine. The physiotherapist receives a daily update about the patient’s exercise pattern and also has a provision of adding an exercise to the patient’s daily schedule, hence accomplishing the task of monitoring the patient through remote access.
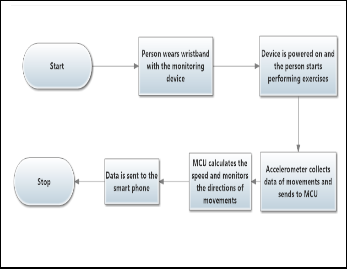
Fig. 3. Receiver Side
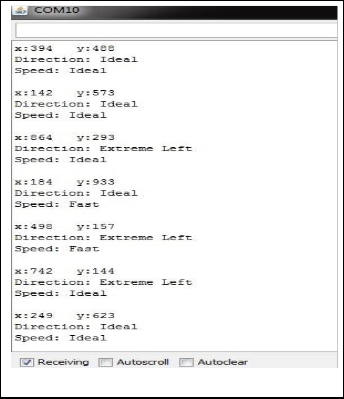
Fig. 2. Transmitter Side
Fig. 4. Analysis at Transmitter Side
IJSER © 2015
International Journal of Scientific & Engineering Research Volume 6, Issue śǰȱ ¢-2015
ISSN 2229-5518
111
[1] ‘Penny-wise, pound-foolish’: The commodification of physiotherapy services in an era of precarious demand by Michael D Landry, Sudha R Raman and Tyler Dyck.
[2] WCPT (World Confederation for Physical Therapy) Congress held at
Amsterdam, Netherlands in 2011.
[3] Journal of Exercise Science and Fitness by Frank H Fu.
Fig. 5. Analysis at Receiver Side (Smartphone).
From the analysis it can be concluded that personal assistance is being provided to a patient with the help of technology. The device effectively monitors the patient’s exercise pattern in- volving the speed and direction of the movements, which is the most important criteria for achieving maximum benefits. Remote access with supervision from the concerned physio- therapist is an added advantage for the user. Since the device is wearable and customizable, it can be used for a wide range of exercises performed for various parts of the body. Moreo- ver, the device is compact and portable which increases it’s utility.
The device can be improvised to implement various other functions. This may include correcting the back posture of a person’s body, avoiding unnecessary movement of dislocated joints, providing personal assistance to heavy weight lifters and so on.
IJSER © 2015