International Journal of Scientific & Engineering Research, Volume 4, Issue 10, October-2013 637
ISSN 2229-5518
Shortest path algorithms on GIS dataset using geotools
1Richard Somalia, 2Dr. M.B. Potdar, 3Manoj Pandya, 4Rupesh Punjani, 5Neeraj Bhargava
Abstract— GIS or Geographic Information System has the ability to query and analyze geographic information in a variety of different contexts. .GIS is a technology which is ideally suited for analysis of the market values of properties, since such values are based upon spatial comparisons as well as individual property attributes. It is well known that computing shortest paths over a network is an important task in many network and transportation related analysis. Choosing an adequate algorithm from the numerous algorithms reported in the literature is a critical step in many applications involving real road networks. We are applying a shortest path algorithm on a graph generated from a shape-file's feature of road network with the distance as the weight-age of a graph node and displaying shortest path with its node information in this tool.
Index Terms— shortest path algorithms, Geographical information system (GIS), Dijkstra algorithm, shape-file, geotools, graph, maven eclipse
—————————— ——————————
With the development of geographic information sys-
tems (GIS) technology, its analysis power is applied in
many fields of real world problems. A mathematical model
of any network or 3D representation of objects is possible
with the consideration of different forces. We can apply GIS
to calculate the shortest path algorithms on .SHP file. The
Esri shape-file, or simply a shape file, is a popular geospa-
tial vector data format for geographic information system
software . It is developed and regulated by Esri as an open
specification for data interoperability among Esri and other
GIS software products. Shape-files spatially describe vector
features: points, line and polygons, representing, for exam-
ple, water body, well, rivers, and lakes etc. Each item usual-
ly has attributes that describe it, such as name or tempera-
ture [1]. One can apply shortest path algorithms like Dijks-
tra on Shape-file file with the help of GEOTOOLS (osgeo)
library available in Java .GEOTOOLS can be used with the
help of MAVEN. Apache Maven is a software project man-
agement and comprehension tool. Based on the concept of a
project object model (POM), Maven can manage a project's
build, reporting and documentation from a central piece of
information. Maven uses an XML file to describe the soft-
ware project being built, its dependencies on other external
modules and components, the build order, directories, and
required plug-ins. It comes with pre-defined targets for
performing certain well-defined tasks such as compilation
of code and its packaging [2]. With the help of this kind of
model, we can select direct source point to destination
point with its node and attributes information in a real time
scenario.
————————————————
• Richard Somalia is affiliated with JNTU, Hyderabad,
e-mail: richisonaliya@gmail.com
• Dr. M.B. Potdar is currently working as project director, BISAG
• Manoj Pandya is currently working as a project Manager at Bhaska-
racharya Institute for Space Applications and Geo-Informatics (BISAG),
Gandhinagar, Gujarat, India PIN 382007 E-mail: mjpandya@gmail.com
• Rupesh Punjani is working as a consulting service lead, IBM
Dijkstra's algorithm was developed by Dutch computer scientist Edsger Dijkstra in 1956 and published in 1959. It is based on graph search, the edge and vertex, gives the shortest path between two vertex .For a given source vertex (node) in the graph, the algorithm finds the path with low- est cost (i.e. the shortest path) between that vertex and eve- ry other vertex. It can also be used for finding costs of shortest paths from a single vertex to a single destination vertex by stopping the algorithm once the shortest path to the destination vertex has been determined [3]. The algo- rithm is represented in brief as below [4].
G = (V,E) where V is a set of vertices and
from the source have already been determined
V-S the remaining vertices.
The other data structures needed are:
2.1 The basic mode of operation is:
1. Initialise d and pi,
2. Set S to empty,
3. While there are still vertices in V-S,
i. Sort the vertices in V-S according to the
current best estimate of their distance from
the source,
ii. Add u, the closest vertex in V-S, to S,
iii. relax all the vertices still in V-S connected
• Dr. Neeraj Bhargava is affiliated with MDS University, Ajmer, Rajasthan
IJSER © 2013 http://ww w.ijs er.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 10, October-2013 638
ISSN 2229-5518
to u
dist[s] ←0 (distance to source vertex is zero)
for all v ∈V–{s}
do dist [v] ←∞ (set all other distances to infinity)
S←∅ (S, the set of visited vertices is
initially empty)
Q←V (Q, the queue initially contains all
vertices)
while Q ≠ ∅ (while the queue is not empty)
do u ← mindistance( Q,dist ) (select the element of Q with
the min. distance)
S ← S ∪ {u} (add u to list of visited vertices)
for all v ∈ neighbors[u]
do if dist [v] > dist [u] + w(u, v) (if new shortest path
found)
then d[v] ← d[u] + w(u, v) (set new value of shortest
path)
(if desired, add tracebackcode)
flexible way to make computation in directed and undi- rected networks. For a given road network we have to cre- ate a graph of that road network with the distance as their weightage. The shape-file is a vector data file containing the feature and its attributes where graph is having edges and nodes. So we have to take a Hash Map to map the feature with its respective edge in the graph. To select a point on a shape-file we are creating a filter of 5x5 pixel square
.selected feature's node are passed to the algorithms to cal- culate the shortest path. The path is calculated on the basic of the distance. It also represents the node visited during the graph traverse.
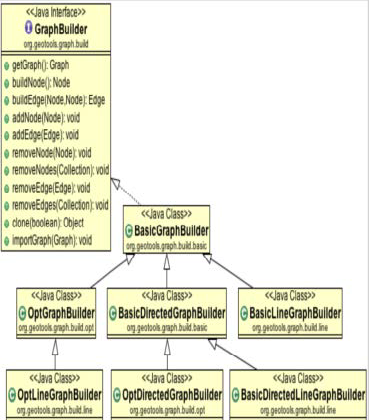
The methods of the class used to convert shape-file into graph are shown as below. A Graph-Builder is used to build and retrieve information from shape-file [6]. The graph module makes the use of Feature, FeatureType, Fea- tureID. At low level, graph generation is done by
return dist
GeoTools is a free software GIS toolkit for developing standards compliant solutions. It provides an implementa- tion of Open Geospatial Consortium (OGC) specifications as they are developed. GeoTools is a contributor to the Ge- oAPI project - a vendor-neutral set of Java interfaces de- rived from OGC specifications - and implements a subset of those libraries.
A Shapefile is a common file format which contains nu- merous features of the same type. Each shapefile has a sin- gle feature type [5].
The classic three files:
• filename.shp: shapes
• filename.shx: shapes to attributes index
• filename.dbf: attributes
Basic metadata: * filename.prj: projection
Open source extensions:
• filename.qix: quadtree spatial index
• filename.fix: feature id index
• filename.sld: style-layer-descriptor style xml object
ESRI extensions:
• filename.sbn: attribute index
• filename.sbx: spatial index
• filename.lyr: arcmap-only style object
• filename.avl: arcview style object
• filename.shp.xml: fgdc metadata
The gt-graph package defines the concept of a graph (or network) made up of .shp file Features. The graph provides
GraphBuilder.
Fig-1 the class diagram to generate graph
getGraph() method is used to retrieve the generated graph. BasicLineGraphGenerator() is used to build a line network. With the help of different types of GraphGenerator, one can create directed or undirected graph as per the need.
IJSER © 2013 http://ww w.ijs er.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 10, October-2013 639
ISSN 2229-5518
We have a number of ways to calculate the shortest path between two nodes .The class DijkstraShortestPathFinder- can be used to calculate a path using Dijkstra’s Shortest Path algorithm [7].
DijkstraIterator.EdgeWeigter weighter = new DijkstraItera- tor.EdgeWeighter() {
public double getWeight(Edge e) {
SimpleFeature feature = (SimpleFeature) e.getObject();
Geometry geometry = (Geometry) fea-
ture.getDefaultGeometry();
return gometry.getLength();
}
}
// Create GraphWalker - in this case DijkstraShortestPath- Finder
DijkstraShortestPathFinder pf = new DijkstraShortestPath- Finder( graph, start, weighter );
pf.calculate();
//find some destinations to calculate paths to
List/*<Node>*/ destinations = destination_node;
//calculate the paths
for ( Iterator d = destinations.iterator(); d.hasNext(); ) {
Node destination = (Node) d.next();
Path path = pf.getPath( destination );
//do something with the path
}
Shortest path algorithm has been applied on GIS dataset with the help of geo-tools open source libraries. USA road network shape-file is referred. Its attributes and projection information is populated in a tabular format. A graph which represents shape-file features with distance as its weightage is generated. A hash map is constructed to store feature id and the graph edges. A 5x5 pixel filter is used to select a source point and a destination point to calculate a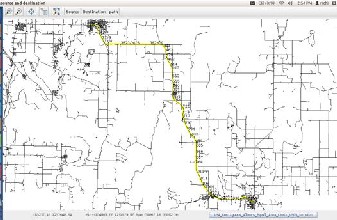
Fig-2 way of traverse between two selected nodes
path in a real time. The model highlights the shortest path in a yellow colour between selected two nodes in a sequen- tial way of traverse.
The model requires longer period of time to calculate the shortest distance for a lager GIS road network dataset. To eliminate this issue, GIS network should be prepro- cessed. Preprocessed output of the graph generation can be used in this model. BOINC can be used to generate the graph on the server with the help of distributed compu- ting [5]. The Berkeley Open Infrastructure for Network Computing (BOINC) is an open source middleware sys- tem for volunteer and grid computing. BOINC is de- signed to be a free structure for anyone wishing to start a volunteer computing project. Most BOINC projects are nonprofit and rely heavily, if not completely, on volun- teers. Graph generation process can be done on the server with the help of BOINC.
The demand for GIS network analysis is increasing day by day. Open source geotools libraries and BOINC for pre- processing of GIS dataset can be used in distributed com- putation environment to improve efficiency.
The authors would like to thank to the Director, BISAG, T .P. Singh for his inspiration and motivation. Authors would also like to thank to Mr. Abdul Zummerwala for technical support.
1 “Esri Shape-file for GIS software as vector data format“ ,Internet :
http://en.wikipedia.org/wiki/Shapefile .[11 aug 2013]
2 “Apache Maven Introduction”, Internet:
http://maven.apache.org/ [10 aug 2013]
3 “Dijkstra algorithm “ ,Internet :
http://en.wikipedia.org/wiki/Dijkstra%27s_algorithm [10 aug
2013]
4 “Dijkstra algorithm flow and pseudo-code for shortest path calcula- tion” ,Internet : http://www.cs.auckland.ac.nz/software/AlgAnim/dijkstra.html.[
11 aug 2013]
5 “Shape-file”, Internet: http://docs.geotools.org/latest/userguide/library/data/shape.ht ml [10 aug 2013]
6 “geotools ”, Internet :
http://docs.geotools.org/latest/userguide/extension/graph/inde x.html, [5 aug 2013]
7 “geotools graph ”, Internet : http://docs.geotools.org/latest/userguide/extension/graph/inde x.html. [15 aug 2013]
8 Kang-Tsung-Chang “Introduction to GIS”, Tata McGraw Hill, 4th
ed., 2008.
IJSER © 2013 http://ww w.ijs er.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 10, October-2013
ISSN 2229-5518
640
9 Heywood Ian ,Sarah Comelius ,Steve Carver" An Introduction To
Geographical Information Systems ", Pearson ,3'd ed,2010.
1-BER IS) 2013