International Journal of Scientific & Engineering Research, Volume 4, Issue 8, August-2013 1171
ISSN 2229-5518
Reduction of High Density Impulse Noise Using Block Based Decision and Unsymmetric Trimmed Median Filter
Shivpratap Pandey, Rupali Kushwaha, Anamika
Abstract— Digital images could be contaminated by impulse noise during image acquisition or transmission. The intensity of impulse noise has the tendency of being either relatively high or relatively low. Thus, it could severely degrade the image quality and cause some loss of information details. A new proposed algorithm modified decision based unsymmetric trimmed median filter (MDBUTMF) for the restoration of gray scale images that are highly corrupted by salt and pepper noise is used. This algorithm shows better results than the Standard Median Filter (MF), Adaptive median filter (AMF), Decision Based Unsymmetric Trimmed adaptive median filter (DBUTAMF), and Progressive Switched Median Filter (PSMF) at high noise densi- ty. The proposed algorithm is tested against different gray scale images and it gives better Peak Signal-to-Noise Ratio (PSNR).
Index Terms— Adaptive, Impulse Noise, MATLAB, Median fiter, PSMF, PSNR, Unsymmetric Trimmed Median Filter.
.
1 INTRODUCTION
—————————— ——————————
Impulse noise in images is present due to bit errors in trans- mission or introduced during the signal acquisition stage. There are two types of impulse noise, they are salt and pepper noise and random valued noise[1]. Salt and pepper noise can corrupt the images where the corrupted pixel takes either maximum or minimum gray level. Several nonlinear filters have been proposed for restoration of images contaminated by salt and pepper noise[2].
There are various methods to help restore an image from im- pulse Noise. The median filter was once the most popular non- linear filter for removing salt & pepper noise because of its good denoising power and computational efficiency [3]. How- ever, when the noise level is over 50%, some details and edges of the original image are smeared by the filter.

In switching median filter [4], [5] the decision is based on a
- Signal weakening (objects counters and edges blurred).
- Affecting non-corrupted (good) image pixels when the densi- ty of the noise is high.
-Difficult to detect and preserve edge details.
-Lead to blurring the image at high noise density.
The proposed Modified Decision Based Un-symmetric Trimmed Medan Filter (MDBUTMF) algorithm removes these drawbacks at high noise density and gives better Peak Signal- to-Noise Ratio (PSNR). This algorithm is implemented in MATLAB and tested on some standard images.
pre-defined threshold value. The use of a switching scheme in impulse removal has attracted more attention because it can avoid the damage of good pixels by employing an impulse detector to determine which pixels should be filtered [6]–[10] The major drawback of this method is that defining a robust
Input
Image
Noise
Addition
Filteing Algo- rithm
De- noisd Image
decision is difficult.
In order to avoid this drawback, Decision Based Unsymmetric Trimmed Median Filter (MDBUTAMF) is proposed [11]. This algorithm does not give better results at very high noise densi- ty thatis at 80% to 90%.These filters had some drawbacks when the density of the impulse noise in the image is high:
————————————————
• Shivpratap Pandey is currently pursuing masters degree program in Communication Engineering in Galgotias University, Greater Noida,India Ph-+91-9811650409, E-mail- spp012345@gmail.com
• Rupali Kushwaha is currently pursuing master degree program in Communication Engineering in Galgotias university, Greater Noida, India E-mail- rupalichsp@gmail.com
• Anamika is currently working in Hermes college of engg. and technolo- gy,Roorkee,India as Assistant professor .
Fig.1 Block diagram for removing the noise from Noisy image
2 METODOLOGY
2.1 DESCRIPTIONS ABOUT MODIFIED DECISION BASED UNSYMMETRIC TRIMMED ADAPTIVE MEDIAN FILTER (MDBUTAMF):
The Modified Decision Based Unsymmetrical Trimmed Adap- tive Median Filter (DBUTAMF) algorithm processes the cor- rupted images by first detecting the salt and pepper noise. The processing pixel is checked whether it is noisy or noise free. If the processing pixel lies between maximum and minimum gray level values, then it is noise-free pixel and it is left uchanged. If the processing pixel takes the maximum or min-
E-mail- anamikachauhan2000@gmail.com
IJSER © 2013
http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 8, August-2013 1172
ISSN 2229-5518
imum gray level, then it is noisy pixel which is processed by
DBUTAMF.
-The steps of the MDBUTAMF Algorithm are elucidated as follows:
Step 1: Read Noisy Image.
Step 2: Select 2D window of size 3x3 with centre element as processing pixel. Assume that the pixel being processed is Pij.
Step 3: If Pij is an uncorrupted pixel (that is, 0<Pij<255), thenits value is left unchanged.
Step 4: If Pij = 0 or Pij = 255, then Pij is a corrupted pixel.
Step 5: If 3/4th or more pixels in selected window are noisy then increase window size to 5x5.
Step 6: If all the elements in the selected window are 0‟s and
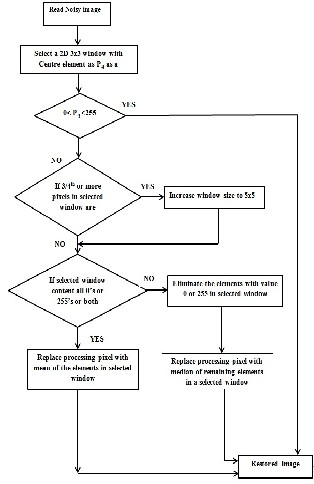
255‟s, then replace Pij with the mean of the elements.in the window else go to step 6.
Fig.2 Flow Chart of MDBUTAMF
Step 7: Eliminate 0‟s and 255‟s from the selected window and find the median value of the remaining elements. ReplacePij with the median value.
Step 8: Repeat steps 2 to 6 until all the pixels in the entire im- age are processed.
-The detailed description of the MDBUTAMF algorithm:
Each and every pixel of an image is checked for the presence of salt and pepper noise. Different cases are illustrated.
Case i) If processing pixel in the selected 3x3 window is non- noisy pixel, it does not require further processing. For exam- ple, if processing pixel is 99, then it is non-noisy pixel:
Case ii) If all the pixel values in the selected window contains salt or pepper noise (i.e., 255 or 0 pixel value):
0 | 0 | 255 | 0 | 255 |
255 | 255 | 0 | 255 | 0 |
0 | 0 | 0 | 255 | 255 |
0 | 0 | 255 | 255 | 0 |
255 | 0 | 0 | 255 | 255 |
where “0” is processing pixel, i.e., Pij.
Since all the elements surrounding are 0‟s and 255‟s, if one takes the median value it will be either 0 or 255 which is again noisy. To solve this problem, the mean of the selected window is found and the processing pixel Pij is replaced by the mean value.Here the mean value is 122.4. Hence replace the pro- cessing pixel Pij by 122.4.
Case iii`) If 3/4th or more pixels in the selected 3x3 window including processing pixel are noisy (i.e., 255 or 0 pixel :
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 8, August-2013 1173
ISSN 2229-5518
Now eliminate the salt and pepper noise from the selected 3x3 window. The 1D array of the above matrix is
[0 78 255 255 0 0 75 255 80]
After elimination of 0‟s and 255‟s, the pixel values in the se- lected window will be [78 75 80]. Here the median value is 78. Hence replace the processing pixel Pij by 78.
As more than 3/4th pixels in the selected 3x3 window are noisy, select 5x5 windows.
99 | 113 | 0 | 0 | 255 |
255 | 0 | 0 | 255 | 165 |
190 | 255 | 255 | 0 | 0 |
0 | 0 | 255 | 93 | 255 |
56 | 255 | 77 | 0 | 255 |
Now eliminate the salt and pepper noise from the selected 5x5 window. The 1D array of the above matrix is
[99 113 0 0 255 255 0 0 255 165 190 255 255 0 0 0 0 255 93 255 56
255 77 0 255]
After elimination of 0‟s and 255‟s, the pixel values in the se- lected window will be
[ 56 77 93 99 113 165 190]
Here the median value is 99. Hence replace the processing pixel Pij by 99.
Case iv) If less than 3/4th pixels in the selected window in- cluding processing pixel are noisy (i.e., 255 or 0 pixel value):
2.2 DESCRIPTION ABOUT PROPOSED ALGORITHM MODIFED DECISION BASED UNSYMMETRIC TRIMMED MEDIAN FILTER (MDBUTMF)
The proposed Modified Decision Based Unsymmetric Trimmed Median Filter (MDBUTMF) algorithm processes the corrupted images by first detecting the impulse noise. The processing pixel is checked whether it is noisy or noisy free. That is, if the processing pixel lies between maximum and minimum gray level values then it is noise free pixel, it is left unchanged. If the processing pixel takes the maximum or min- imum gray level then it is noisy pixel which is processed by MDBUTMF.
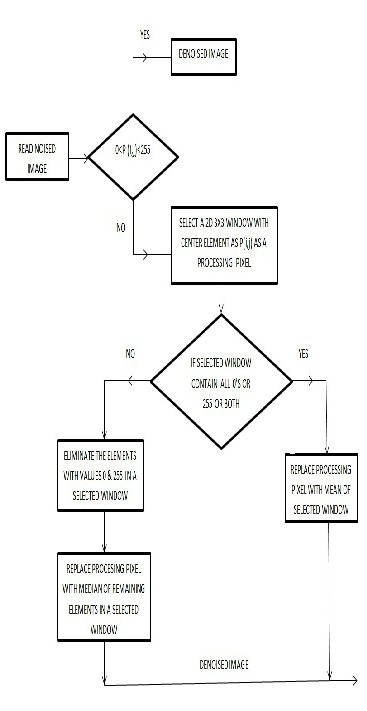
- The step of the MDBUTMF Algorithm is elucidated as follows:
Step 1: Images are processed. Select a 2-D window of size 3x3. Assume that the pixel being processed is P ij.
Step 2: If 0<Pij <255 then Pij is an uncorrupted pixel.
Step3: If Pij =0 or P ij =255 then is a corrupted pixel then two cases are possible as given in Casei) and ii).
Case i) If the selected windows contain all the elements as 0’s
and 255’s. Then replace Pij with the mean of the element of window.
Case ii) If the selected window contains not all elements as 0’s and 255’s. The eliminate 255’s and 0’s and find the median value of the remaining elements. Replace Pij with the median value.
Step 4: Repeat steps 1 to 3 until all the pixels in the entire im- age are processed.
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 8, August-2013 1174
ISSN 2229-5518
Case i): If the selected window contains salt/pepper noise as processing pixel (i.e., 255/0 pixel value) and neighboring pixel values contains all pixels that adds salt and pepper noise to the image:
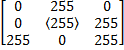
Where “255” is processing pixel, i.e., Pij. Mean value (average value): (0+255+0+0+255+255+255+0+255)/9 = 141.66
Since all the elements surrounding P ij are 0’s and 255’s. If one takes the median value it will be both 0 and 255 which is again noisy. To solve this problem, the mean of the selected window is found and the processing pixel is replaced by the mean val- ue.Here the mean value is141.66. Replace the processing pixel by 141.66.
Case ii): If the selected window contains salt or pepper noise as processing pixel (i.e., 255/0 pixel value) and neighboring pixel values contains some pixels that adds salt (i.e., 255 pixel value) and pepper noise to the image.
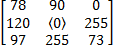
where “0” is processing pixel, i.e., Pij.
Now eliminate the salt and pepper noise from the selected window. That is, elimination of 0’s and 255’s.The 1-D array of the above matrix is.

After elimination of 0’s and 255’s the pixel values in the select- ed window will be

Fig.3 Flow chart of MDBUTMF
The detailed description of the MDBUTMF algorithm:
Each and every pixel of the image is checked for the presence of salt and pepper noise. If the processing pixel is noisy and all other pixel values are either 0’s or 255’s is illustrated in Case ( i). If the processing pixel is noisy pixel that is 0 or 255 is illus- trated in Case (ii). If the processing pixel is not noisy pixel and its value lies between 0 and 255 is illustrated in Case ( iii).
Here the median value is 90. Hence replace the processing
pixel Pij by 90.

Case iii): If the selected window contains a noise free pixel as a processing pixel, it does not require further processing. For example, if the processing pixel is 90 then it is noise free pixel:
where “90” is processing pixel, i.e., Pij. Since “90” is a noise free pixel it does not require further processing.
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 8, August-2013 1175
ISSN 2229-5518
3. RESULT AND DISCUSSION
Performances of algorithms are measured by calculating
Following parameters:
MSE: MSE measures the average of the squares of the "er-

rors." The error is the amount by which the value implied by the estimator differs from the quantity to be estimate.
(1)
Where MXN is size of the image, Yrepresents the original im-
age,  represents the denoised image.
represents the denoised image.
PSNR: Peak signal-to-noise ratio, often abbreviated PSNR, is
an engineering term for the ratio between the maximum pos- sible power of a signal and the power of corrupting noise that affects the fidelity of its representation
Table 1. Estimated values of PSNR from different filters for
‘LENA’ (256×256) gray scale image:

(2)
Table 2. Comparison of estimated values of PSNR of differ- ent gray scale images (256×256) at a noise level of 80%:
(a) (b)


(c) (d)
(e) (f)
Fig.5 a) Original image, b) Corrupted image by 80% Impulse Noise, c) Median filter, d) PSM filter, e) MDBUTAM filter f) MDBUTM filter
• LENA
• CAMERAMAN
• PIRATE
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 8, August-2013 1176
ISSN 2229-5518
6. REFRENCES
1. Rafel Gonzalez and Richard E. Woods “Digital Image Pro- cessing”.Addison-Wesley second edition 2002.
2. S. Esakkirajan, T. Veerakumar, Adabala N. Subramanyam, and C. H. PremChand “Removal of High Density Salt and Pepper Noise Through Modified Decision Based Unsymmetric Trimmed Median Filter” IEEE SIGNAL PROCESSING LET- TERS, VOL. 18, NO. 5, MAY 2011.
3. J. Astola and P. Kuosmaneen, Fundamentals of Nonlinear Digi- tal Filtering. Boca Raton, FL: CRC, 1997.
4. S.Zhang and M.A.Karim,“Anew impulsedetector for switching
median filters,” IEEE Signal Process. Lett., vol. 9, no. 11, pp.
360–363,Nov. 2002.
5. P.E.Ng and K.K.Ma, “Aswitchingmedian filter with boundary discriminative noise detection for extremely corrupted images,” IEEE Trans. Image Process., vol. 15, no. 6, pp. 1506–1516, Jun.
2006.
6. T. Sun and Y. Neuvo, “Detail-preserving median based filters in image processing,” Pattern Recognit. Lett., vol. 15, pp. 341347,
1994.
7. Z. Wang and D. Zhang, “Progressive switching median filter for the removal of impulse noise fromhighly corrupted imaes,” IEEE Trans. Circuits Syst. II, vol. 46, pp. 78–80, Jan. 1999.
8. T. Chen, K.-K. Ma, and L.-H. Chen, “Tri-state median filter for image denoising,” IEEE Trans. Image Processing, vol. 8 pp.
1834–1838, Dec.1999.
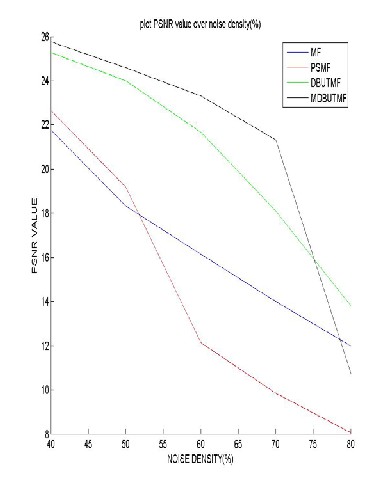
Figure.6 Plot PSNR Value of different filter over different noise density (%)
In our experiment ,we introduced fixed amount of impulse noise in to original image ‘Lena’.
Fig(5) ,show that our proposed filter has better restoration particularly for highly corrupted image i.e. noise ration larger than 90% compared to MF, PSMF, MDBUTAMF and MDBUTMF
4. CONCLUSION
MDBUTMF algorithm is gives better performance in compari- son with MF, AMF and other existing noise removal algo- rithms in terms of PSNR. The performance of the algorithm has been tested at low, medium and high noise densities on gray-scale images. Even at high noise density levels the MDBUTMF gives better results in comparison with other ex- isting algorithms. Both visual and quantitative results are demonstrated. The proposed algorithm is effective for salt and pepper noise removal in images at high noise densities.
5. ACKNOWLEDGEMENT
I express my thanks to my family.
9. E. Abreu,M. Lightstone, S. K.Mitra, and K. Arakawa, “A new ef- ficient approach for the removal of impulse noise from highly corrupted images,” IEEE Trans. Image Processing, vol. 5, pp.
1012–1025, 1996.
10. H.-L. Eng and K.-K. Ma, “Noise adaptive soft-switching median filter,”IEEE Trans. Image Processing, vol. 10, pp. 242–251, Feb.
2001.
11. Vivek Chandra, Sagar Deokar, Siddhant Badhe, Rajesh Yawle,” Removal of High Density Salt and Pepper Noise Through Modi- fied Decision Based Unsymmetric Trimmed Adaptive Median Filter” International Journal of Engineering and Advanced Technology (IJEAT) ISSN: 2249 – 8958, Volume-2, Issue-3, Feb- ruary 2013.
IJSER © 2013 http://www.ijser.org