International Journal of Scientific & Engineering Research, Volume 5, Issue 5, May-2014 1420
ISSN 2229-5518
Real time object tracking to remove occlusion using OpenCV
Aniruddh Thakor, Anjali Askhedkar
Abstract— Real time Object tracking is becoming a challenging ingredient in analysis of video imagery for efficient and robust object tracking. In this paper we presents a how to remove occlusion problem from real time video, removing occlusion from video is still a challenging part. Object tracking with sparse Prototypes, exploits both classic Principal Component Analysis (PCA) algorithms and sparse representation algorithms for learning appearance models. Here, regularization into the PCA reconstruction is introduced and this algorithm to represent an object by sparse prototypes that account precisely for data and noise is developed. In order to reduce tracking drift, a method that considers occlusion and motion blur into account rather than simply image observations for model update is given. The proposed tracking algorithm performs favorably against various methods that can be demonstrated by both qualitative and quantitative estimations on challenging image sequences.
Index Terms— Object tracking, sparse prototype, Principle component analysis (PCA), L1 minimization, incremental visual tracking
(IVT) and Compressive tracking
—————————— ——————————
frame and sliding window. Online learning facilitates
tracking algorithms by adapting to appearance changes of the target and the background. It includes various methods like template update, incremental subspace
s one of the problems in computer vision, online object tracking plays a critical role in research such as motion analysis, image compression and activity
recognition. Difficulties including intrinsic and extrinsic factors to account for the appearance changes of a target object affects the development of robust online tracker as in past decades most of the progress have already been made.
A tracking method typically consists of three components
Observation model, Dynamic model, Search strategy.
The observation model is concerned with how objects are
represented. Any representation scheme can be catego-
rized based on adopted features like intensity, color, tex-
ture, Haar-like feature, etc and description models like
holistic histogram, part-based histogram, and subspace
representation. Instead of treating the target object as a
collection of low-level features, subspace representation
methods provide a compact notion of the “thing” being tracked, which facilitates other vision tasks.
Dynamic model is describes the states of an object over time. For object tracking, generative methods focus on modeling appearance and formulate the problem as find- ing the image observation with minimal recon struction error and the other side, discriminative algorithms aims to determine a decision boundary that distinguishes the target from the background.
Search strategy is for finding the states in the current
————————————————
• Anjali Askhedkar is currently Assistant Professor in Electronics and Tele- comunicationin in MIT College Of Engineering, University of Pune, India,
PH-09850826663. E-mail: anjali.askhedkar@mitcoe.edu.in
learning and online classifiers have been demonstrated to be effective for object tracking.
Sparse coding algorithms [1] is modeling data vectors as sparse linear combinations of basic elements is generally used in machine learning, neuroscience, signal pro- cessing, and statistics. The recent development of sparse coding representation has been proved to be very effec- tive for signal reconstruction and classification in the au- dio and image processing domains (image denoising, image classification, and object tracking, etc). These methods have been proved that a learning dictionary from data outperforms pre-chosen ones since the former can significantly reduce reconstruction error. Different from the representations based on PCA and its variants, sparse models do not impose that the bases in the dic- tionary be orthogonal, which allows more flexibility to adapt the representation to the data. A robust generative tracking algorithm with adaptive appearance model which handles partial occlusion and other challenging factors is proposed in this project. By exploiting the ad- vantage of subspace representation, this algorithm is able to process higher resolution image observations, and per- forms more efficiently with favorable results than the existing method based on sparse representation of tem- plates.
These techniques are based purely on 2D techniques for recognition, image registration and handling of illumina- tion changes. This fact instantly differentiates the ap- proach from systems that either attempt to estimate a 3D model from 2D input or require a 3D data as an input. Although these techniques can give better robustness to pose variation given an exact 3D model, for access control applications where only moderate pose variation is pre- sent, the proposed method will be more sufficient. Note that 2D images of faces under changing brightness al- ready contain 3D shape-related information and this in- formation can be leveraged by 2D algorithms for recogni-
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 5, May-2014 1421
ISSN 2229-5518
tion and alignment even if shape is not reconstructed ex- plicitly.
Correspondence between points in the training and the test image should be achieved in case of holistic recogni- tion algorithms. Presently research exist on Active Ap- pearance Models [10], and the closely related Active Shape Model [11] to register images against a relatively high-dimensional model of conceivable face appearances, often leveraging face specific contours. The advantages of this model are variations in expression and pose, they add complexity to applications where subjects normally present a neutral face or have moderate expression. Here we have some freedom (i.e. similarity transformations, etc). Iterative registration in this spirit dates at least back to the Lucas-Kanade algorithm [12].
Early work on image registration is aimed at the problem
for object representation in visual tracking when partial occlusion occurs as the noise term cannot be modeled with small variance. Hence, the IVT method is sensitive to partial occlusion. In addition, the IVT method is not equipped with an effective update mechanism since it simply uses new observations for Learning new basis vectors without detecting partial occlusion and pro- cessing these samples accordingly.
Sparse representation has been largely studied and ap- plied in pattern recognition and computer vision (face recognition, super resolution, and image in painting, etc). An algorithm is proposed by casting the tracking prob- lem as handling partial occlusion with trivial templates and by finding the most likely patch with sparse repre- sentation.
𝑧
of registering nearly identical images; say by maximizing
normalized correlation or minimizing a sum of squared
𝑦 = 𝐴𝑧 + 𝑒 = [𝐴𝐼] �
𝑒
� = 𝐵𝑐 (2)
distances, here we must confront several physical factors simultaneously: illumination variations, misalignment, and corrupted pixels. Illumination variation can be taken care by expressing the test image as a linear combination of an appropriate set of training images. Illumination ro- bust tracking shows similar representations. For gross to robustness errors, the L2-norm of the residual is a less appropriate objective function than the classical L1-norm.
Where, y denotes an observation vector, A represents a
matrix of templates, z indicates the corresponding coeffi-
cients, and e is the error term which can be viewed as the
coefficients of trivial templates.
By assuming that each candidate image patch is sparsely represented by a set of target and trivial templates, Eq. 2 can be solved via L1 minimization [5].
1 2 + 𝜆‖𝑐‖
Its use here is less motivated by theoretical results due to
Cande’s and Tao [10]. These two observations lead us to
𝑚𝑖𝑛 ‖𝑦 − 𝐵𝑐‖
2
1 (3)
pose the registration problem as illumination coefficients that minimize the L1-norm of the representation error and the search for a set of transformations. All of these problems can also be solved efficiently using first-order techniques for L1-minimization [5].
Object tracking via online subspace learning has been engaging much attention in recent years. The incremental visual tracking (IVT) method [7] introduces an online update approach for efficient learning and updating a low dimensional PCA subspace representation of the tar- get object. Various experimental results demonstrate that PCA subspace representation using online update is ef- fective in dealing with appearance changes caused by in- plane rotation, scale, illumination variation and pose change. Though, it has also been shown that the PCA subspace based representation scheme is sensitive to par- tial occlusion.
Where y denotes an observation vector, z indicates the corresponding coding or coefficient vector, U represents a matrix of column basis vectors, and e is the error term.
In PCA, the underlying assumption is that the error vec- tor e is Gaussian distributed with small variances (i.e., small dense noise). Therefore, the coding vector z can be described by z = UTy. But, this assumption does not hold
The underlying assumption of this approach is that error e can be modeled by arbitrary but sparse noise, and there- fore it can be used to handle partial occlusion. However, the l1 tracker has two main drawbacks. First, the compu- tational complexity limits its performance. As it requires solving a series of l1 minimization problems, it often deals with low resolution images as a tradeoff of speed and accuracy. Such low-resolution images may not cap- ture sufficient visual information to represent objects for tracking. The l1 tracker is computationally expensive even with further improvements. Second, it does not ex-
ploit rich and redundant image properties which can be capture compactly with subspace representations. We present an efficient and effective representation those factors out the part describing the object appearance and the other part for noise.
Tracking algorithms can be generally categorized as ei- ther generative or discriminative based on their appear- ance models. Generative tracking algorithms typically learn a model to represent the target object and then use it to search for the image region with minimal reconstruc- tion error. Discriminative algorithms pose the tracking problem as a binary classification task in order to find the decision boundary for separating the target object from the background.
Compressive tracking [2] is an effective and efficient tracking algorithm with an appearance model based on features extracted in the compressed domain. The main components of compressive tracking algorithm are
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 5, May-2014 1422
ISSN 2229-5518
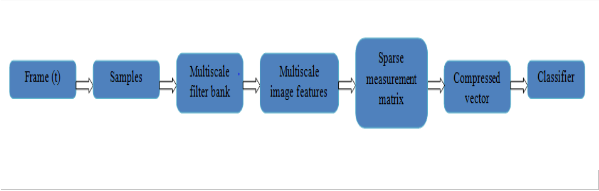
Fig. 1 Updating Classifier at the t-th frame
Fig. 2 Updating classifier at t+1 th frame
object can be well represented based on the features ex- tracted in the compressive domain. It is also discrimina- tive because we use these features to separate the target from the surrounding background via a naive Bayes clas- sifier.
The tracking problem is formulated as a detection task and our algorithm is shown in Fig 1& Fig 2. We assume that the tracking window in the first frame has been de- termined. At each frame, we sample some positive sam- ples near the current target location and negative samples far away from the object center to update the classifier. To predict the object location in the next frame, we draw some samples around the current target location and de- termine the one with the maximal classification score.
1. Sample a set of image patches, where l t−1 is the tracking location at the (t-1) -th frame, and ex- tract the features with low dimensionality.
2. Use classifier to each feature vector and find the
tracking location lt with the maximal classifier response
3. Sample two sets of image patches
4. Extract the features with these two sets of sam- ples and update the classifier parameters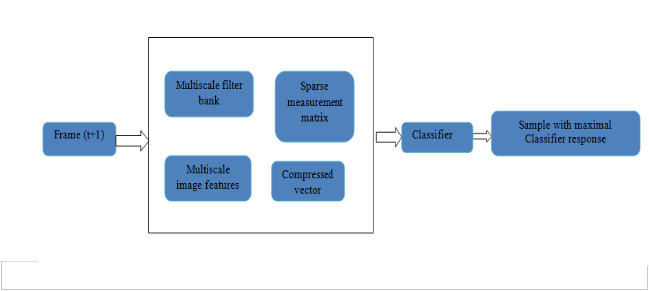
shown in Fig. 1. Appearance model is generative as the
For implementation purpose, we used OpenCV platform has been used. OpenCV has advantages over existing platforms such as high processing speed (approximately
25-30 frame per second), open source, library of pro- gramming functions mainly aimed at real time computer vision, originally written in C but now has a full C++ in- terface. Because of high processing speed it is suitable for real time applications.
We have used OpenCV2.3 and Microsoft visual studio
2008 as a debugger. Language used for coding is C++.
The results of proposed tracking methods are shown be- low. Fig.3 shows results for steady state object. Fig.4 shows optical flows when occlusion occurs and fig.5 shows results when object is partially occluded. The bounding box shows the target object.
The results are taken on the basis of compressive track- ing.
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 5, May-2014 1423
ISSN 2229-5518
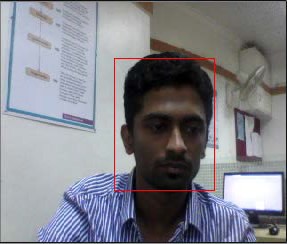
Fig. 3 Compressive tracking when object is steady
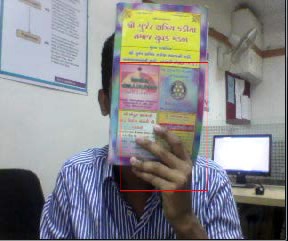
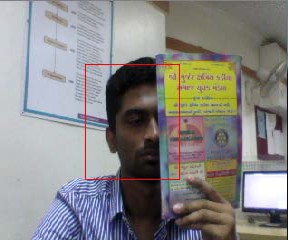
Fig. 4 Compressive tracking when object is fully occluded
occlusion. The system achieves extremely stable perfor- mance under a wide range of variations in illumination, misalignment, and even under small amounts of pose and occlusion.
[1]. Dong Wang, Huchuan Lu, Member, IEEE, and Ming- Hsuan Yang, Senior Member, IEEE” Online Object Tracking With Sparse Prototypes”, Vol.22, NO.1, Jan
2013.
[2]. Kaihua Zhang1, Lei Zhang1, and Ming-Hsuan
Yang2.Real-Time Compressive Tracking A. Fitzgibbon et al. (Eds.): ECCV 2012, Part III, LNCS 7574, pp. 866–
879, 2012
[3]. D. Wang, H. Lu, and Y.-W. Chen, “Incremental MPCA for color object tracking,” in Proc. IEEE Int. Conf. Pat- tern Recogn., Aug. 2010.-
[4]. Z. Kalal, J. Matas, and K. Mikolajczyk, “P-N learning: Bootstrapping binary classifiers by structural con- straints,” in Proc. IEEE Conf. Computer Vision Pattern Recogn., Jun. 2010, pp. 49–56.
[5]. J. Kwon and K. M. Lee, “Visual tracking decomposi- tion,” in Proc. IEEE Conf. Comput. Vision Pattern Recogn., Jun. 2010, pp. 1269–1276.
[6]. X. Mei and H. Ling, “Robust visual tracking using L1 minimization,” in Proc. IEEE Int. Conf. Comput. Vision, Sep.–Oct. 2009, pp. 1436–1443.
[7]. D. Ross, J. Lim, R.-S. Lin and M. H. Yang, “Incremental learning for robust visual tracking,” Int. J. Comput. Vision, vol. 77, nos. 1–3, pp. 125–141, 2008.
[8]. H. Grabner and H. Bischof, “On-line boosting and vision,” in Proc. IEEE Conf. Comput. Vision Pattern Recogn. , Jun.2006, pp. 260–267.
[9]. E. Candes and T. Tao, “Decoding by linear programming,” IEEE Transactions on Information Theory, vol. 51, no. 12,
2005.
[10]. D. Comaniciu, V. R. Member, and P. Meer, “Kernelbased object tracking,” IEEE Trans. Pattern Anal.Mach. Intel., vol.
25, no. 5, pp. 564–575, May 2003 1751–1754.
[11]. T. Cootes, G. Edwards, and C. Taylor, “Active appearance models,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 23, no. 6, pp. 681–685, 2001
[12]. T. Cootes and C. Taylor, “Active shape models – ‘smart snakes’,” in Proceedings of British Machine Vision Conference, 1992.
[13]. B. Lucas and T. Kanade, “An iterative image registration technique with an application to stereo vision,” in Proceedings of International Joint Conference on Artificial Intelligence, vol. 3, 1981, pp. 674
Fig. 5 Compressive tracking when object is partially occluded
This paper presents a visual object tracking algorithm via the proposed sparse prototype representation. In this pa- per we explicitly take partial occlusion and motion blur into account for appearance update and object tracking by exploiting the strength of subspace model and sparse representation. We propose sparse representation for ro- bust visual tracking in real time environment using OpenCV. We used compressive tracking for removing
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 5, May-2014
ISSN 2229-5518
1424
IJSER lb)2014