International Journal of Scientific & Engineering Research,Volume 3, Issue 6, June-2012 1
ISSN 2229-5518
Performance Analysis of Fractional Order PID Controller with the Conventional PID Controller for Bioreactor Control
Shivaji Karad, Dr. S. Chatterji, Prasheel Suryawanshi
Abstract— Despite the dramatic advancement of process control in recent decades, the proportional-integral-derivative (PID) controller contin- ues to be the most frequently used feedback controller today. PID control mechanism, the ubiquitous avail ability of reliable and cost effective commercial PID modules, and pervasive operator acceptance are among the reasons for the success of PID controllers. An elegant way of enhancing the performance of PID controllers is to use fractional-order controllers where I and D-actions have, in general, non-integer orders. In a PIλDδ controller, besides the proportional, integral and derivative constants, denoted by Kp, Ti and Td respectively, we have two more adjustable parameters: the powers of s in integral and derivative actions, viz. λ and δ respectively. This paper compares the performance of conventional PID and fractional PID controllers used for bio-reactor control.
—————————— ——————————
he PID controllers have remained, by far; the most com- monly used in practically all industrial feedback control applications. The main reason is its relatively simple structure, which can be easily understood and implemented in practice. They are thus, more acceptable than advanced controllers in practical applications unless evidence shows that they are insufficient to meet specifications. Many techniques have been suggested for their parameters tuning. Although all the existing techniques for the PID controller parameter tuning perform well, a continuous and an intensive research work is still underway towards system control quality enhancement and performance improvements. On the other hand, in recent years, it is remarkable to note the increasing number of studies related with the application of fractional controllers in many areas of science and engineering. This fact is due to a better understanding of the fractional calculus potentialities. In the field of automatic con- trol, the fractional order controllers which are the generaliza- tion of classical integer order controllers would lead to more precise and robust control performances. Although it is reasonably true that the fractional order models require the fractional order controllers to achieve the best performance, in most cases the researchers consider the fractional order
————————————————
![]() Shivaji Karad is currently pursuing Master of Engineering in Instrumen- tation & Control in NITTTR, Chandigarh, India.
Shivaji Karad is currently pursuing Master of Engineering in Instrumen- tation & Control in NITTTR, Chandigarh, India.
E-mail: shivaji.karad91@gmail.com
![]() Dr. S. Chatterji, Professor and Head, Electrical Engineering Department
Dr. S. Chatterji, Professor and Head, Electrical Engineering Department
NITTTR, Chandigarh, India.
![]() Prasheel Suryawanshi, Associate Professor, Electronics & Tele Comm. Engineering Dept., MAE, Alandi, Pune, India.
Prasheel Suryawanshi, Associate Professor, Electronics & Tele Comm. Engineering Dept., MAE, Alandi, Pune, India.
controllers applied to regular linear or non-linear dynamics to enhance the system control performances.
This paper is organized as follows: In section 2, we present a brief introduction to fractional calculus. Section 3 deals with fractional order PID controller. Section 4 presents the application of proposed fractional PID controller for bio- reactor control system. Section 5 deals with simulation results of the system and section 6 discuss the conclusion.
Fractional calculus is an old mathematical topic since
17th century. Fractional calculus is a subdivision of calculus theory which generalizes the derivative or integral of a function to non-integer order. Fractional calculus helps evaluating (dny/dtn), n-fold integrals where n is fractional, irrational or complex. For fractional order systems n is considered to be fractional. The number of applications where fractional calculus has been used rapidly grows. These mathematical phenomena allow to describe a real object more accurately than the classical ―integer-order‖ methods. The real objects are generally fractional however, for many of them the fractionality is very low. The main reason for using the integer-order models was the absence of solution methods for fractional differential equations. At present there are lots of methods for approximation of fractional derivative and integral and fractional calculus can be easily used in wide areas of applications (e.g.: control theory - new fractional controllers and system models, electrical circuits theory - fractances, capacitor theory, etc.)
[1], [2].
The generalized fundamental operator which includes the differentiation and integration is given as:
IJSER © 2012
International Journal of Scientific & Engineering Research,Volume 3, Issue 6, June-2012 2
ISSN 2229-5518
, R (q) > 0
![]() 1 , R (q) = 0 (1)
1 , R (q) = 0 (1)
, R (q) < 0
= bmDβm u(t) + bm-1Dβm-1 u(t)+…+ b0Dβ0 u(t) (4)
The transfer function of the system is:![]()
G(s) = (n ≥ m) (5)
Where,
a – Lower limit of integration t – Upper limit of integration
q – Order of fractional differentiation or integration
Where,
βk (k = 0,1,…..,m), αk (k = 0,1,…..,n) are arbitrary real numbers
ak (k = 0,1,….,n) and bk (k = 0,1,…….,m) are arbitrary constant.
The feedback control loop of a fractional order system with a fractional controller is similar to the integer order feedback
q with negative value indicates integration while q with positive value indicates differentiation [2].
The theory of fractional-order derivative was developed mainly in the 19th century. There are several definitions of fractional order derivative. Two important and widely applied definitions are:
control loop. It is shown in Fig. 1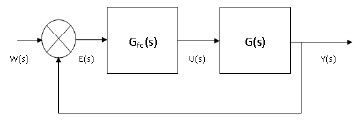
Fig. 1 Feedback Control Loop for a Fractional System
![]()
![]()
Where, [x] is the integer part of x h is the time step.
(2)
(3)
Where,
W(s) – Input Signal
E(s) – Error Signal
Gfc(s) – Controller Transfer Function
G(s) – System or plant Transfer Function
Y(s) – output Signal
U(s) – Controller Signal![]()
![]()
For a wide class of functions which appear in real physical and engineering applications, the Riemann-Liouville and the Grunwald-Letnikov definitions are equivalent [2].
Feedback control system is one of the major areas where the concept of fractional calculus is being applied to obtain an efficient system and also longevity and freedom. To the control engineer to compensate any shifts in the transfer function due to parametric spreads, aging etc. a system is efficient if the controller is of the similar order to that of a plant being controlled. In reality the systems are of fractional order and therefore to have a fractional order controller will be efficient [1, 4].
The time domain representation of a fractional order system is given as:
anDαny(t) + an-1Dαn-1y(t)+…+ a0Dα0y(t)
PID controllers belong to dominant industrial controllers and therefore are topics of steady effort for improvements of their quality and robustness. One of the possibilities to improve PID controllers is to use fractional- order controllers with non-integer derivation and integration parts.
A fractional order PID controller is represented as PIλDδ. It allows us to adjust derivative (λ) and integral (δ) order in addi- tion to the proportional, integral and derivative constants where the values of λ and δ lie between 0 and 1. This gives extra freedom to operator in terms of two extra knobs i.e.
- Order of differentiation
- Order of integration
IJSER © 2012
International Journal of Scientific & Engineering Research,Volume 3, Issue 6, June-2012 3
ISSN 2229-5518
This also provides more flexibility and opportunity to better adjust the dynamical properties of the control system. The fractional order controller revels good robustness. The robust- ness of fractional controller gets more highlighted in presence of a non-linear actuator. Fig. 2 shows the concept of a fractional PID control system [5].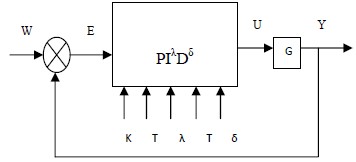
Fig. 2 Fractional PID Control System
The integro-differential equation defining the control action of a fractional order PID controller is given by:
Kpe(t) + Ti e(t) + TdD e(t) = u(t) (6)
the need of microbes. A typical control and instrumentation diagram of the bioreactor used for analysis, with biomass concentration as the measured output, is shown in Fig. 3.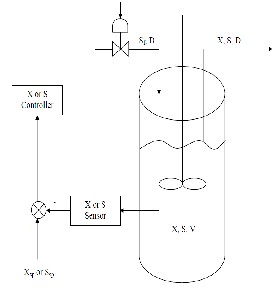
Fig. 3 Simplified PI diagram for a Bio-reactor
-λ δ
Applying Laplace transform to this equation with null initial conditions, the transfer function of the controller can be expressed by:
Gfc = Kp+Tis-λ+Tdsδ (7)
Taking λ=1 and δ=1, we can obtain a classical PID controller. If λ=0 we obtain a PDδ controller, etc. All these types of controllers are the particular cases of the PIλDδ controller. Actually, in theory, PIλDδ itself is an infinite dimensional linear filter due to the fractional order in differentiator or integrator.
It can be expected that PIλDδ controller may enhance the system control performance due to more tuning knobs introduced. Actually, in theory PIλDδ itself is an infinite dimensional linear filter due to the fractional order in differen- tiator or integrator.
Biochemical reactors are cylindrical culture vessels used for the fermentation process in which anaerobic breakdown of complex organic materials by the action of anaerobic micro- organism or free enzymes takes place. Materials such as carbon, nitrogen, oxygen, which are called substrate, and other nutrients are brought with the cell into the culture vessel (bioreactor) and converted within the cell via hundreds of reactions to the various constituents of the cell as well as to biochemical product. Bioreactors provide a controlled environment that is necessary to bring the better growth of microbes, and also maintain constant temperature according to
In the following a bio-reactor system is used to evaluate the control performance of proposed Fractional PID controller. The performance of the fractional PID controller is compared with the performance of conventional PID controller, which is widely used to control the chemical processes.
In the present control study the parameters used for the
Monod model are:
μmax = 0.53 h–1, Ks = 0.12 g/l,
Yx/s = 0.4, Yp/x = 0.5, Sf = 4.0 g/l,
The non-linear process has the following steady-state for a dilution-rate of 0.43 h–1 at which the production rate is maximum,
Bio-mass-concentration, X = 1.3936 g/l Substrate-concentration, S = 0.5160 g/l Product-concentration, P = 0.6968 g/l
The maximum-production rate is given by:
Dmaxoutput = μmax ![]() (8) The process is controlled at this operating point.
(8) The process is controlled at this operating point.
The state-space formulation is used to linearize the non-linear equations around the steady-state operating-point [10]. The
IJSER © 2012
International Journal of Scientific & Engineering Research,Volume 3, Issue 6, June-2012 4
ISSN 2229-5518
transfer function relating the dilution-rate to the biomass concentration is:![]()
![]()
![]()
Gp(s) = (9)
Fig.4 shows the Simulink model for bioreactor control using
PID and FOPID controllers.
using PID Cotroller
Fig. 5
Time response of Bio-reactor
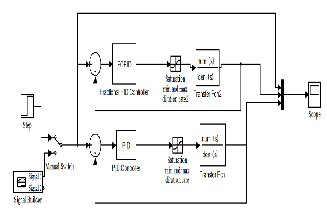
Fig.4 Simulink model for bio-reactor control using PID and FOPID
controller
A PID controller is design for the integer order model of bio- reactor using MATLAB PID tuner block. The system (Fig. 3) is tuned for the following parameters for the PID controller:
Kp = -2.7
Ki = -1.0
Kd = 0.7
Fig.5 shows the time response characteristics for a step change of bioreactor control system and Table 1 shows its time response specifications.
TABLE 1 TIME RESPONSE CHARACTERISTICS OF THE SYSTEM REPRESENTED IN FIG. 5
Parameters | Value |
Overshoot | 5% |
Rise-time | ½ hours |
Settling-time | 8 hours |
Steady-state value | 1 |
PID controller works well for the system with fixed parameters. However, in the presence of large parame- ter variations or major external disturbances, the PID con- trollers usually face trade-off between:![]()
Fast response with significant overshoot. Smooth but slow response.
Bio-reactor control system is a highly complex, non- linear and uncertain system. For such systems a controller with more number of tuning parameters and which works well for the complex non-linear systems is to be used.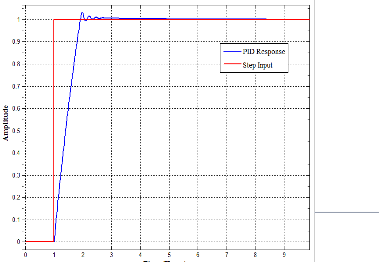
Fractional PID controller is one such controller which is to be design for the bio-reactor control. A fractional PID controller is designed for the system by experimental method with following parameters:
Kp = -2.7
Ki = -0.8, λ = 1
Kd = 1, δ = 0.8
Fig.6 shows the time response characteristics and Table 2 shows its time response specifications.
IJSER © 2012
International Journal of Scientific & Engineering Research,Volume 3, Issue 6, June-2012 5
ISSN 2229-5518
TABLE 2 TIME RESPONSE CHARACTERISTICS OF THE SYSTEM REPRESENTED IN FIG. 6
Fig. 6 Time response of Bio-reactor using FOPID Controller
Fig. 7 shows the simulation results for the bio-reactor control using both, the conventional PID controller and the Fractional order PID controller.
Fig. 7 Step Response of PID vs FOPID for Bio-reactor
Fig. 8 below shows the set-point change tracking response for both the PID and FOPID controller. It is observed that FOPID controller shows a more peak overshoot than the PID controller but it's settling time for the set-point change is very less as compared to PID controller. Also due to the non- minimal phase system the FOPID controller gives a small
instant negative peak overshoot.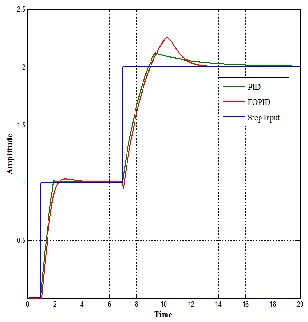
Fig. 8 Set-point tracking response for PID and FOPID controller
The PID and fractional order PID controllers are designed for the bio-reactor control process. The characteristics are compared in table 3.
TABLE 3 COMPARISION OF TIME RESPONSE CHARACTE- RISTICS OF PID CONTROLLER AND FRACTIONAL PID CONTROLLER
Characteristics | PID Controller | FOPID Controller |
Peak Value | 5% | 4% |
Settling- Time | 8 | 5 |
Rise- Time | 0.5 | 0.8 |
Steady State Value | 1 | 1 |
In present work, performance comparison of a conventional PID controller with that of fractional order PID controller has been presented. Firstly, a simulation model of bio-reactor con- trol system is constructed with the help of MatLab/Simulink module. Then, performance comparison of PID controller with
IJSER © 2012
International Journal of Scientific & Engineering Research,Volume 3, Issue 6, June-2012 6
ISSN 2229-5518
that of the fractional order PID controller are simulated and studied. Comparing the step responses with the ones obtained (in simulation) with the PID controller, the better performance of the system with the fractional order PID controller was observed.
Fractional order PID controller for integer order system offer better flexibility in adjusting gain and phase characteristics than the PID controllers, owing to the two extra tuning parameters i.e. order of integration and order of derivative in addition to proportional gain, integral time and derivative time.
[1] Mark Axtell, Michael E. Bise, ―Fractional Calculus Applications In Con- trol Systems‖, Proceedings of the IEEE National Conference on Aerospace and Electronics, NAECON 1990, pp. 563-566, 1990.
[2] Yang Quan Chen, Ivo Petras and Dingyu Xue, “Fractional
Order Control - A Tutorial‖, 2009 American Control Conference
Hyatt Regency Riverfront, St. Louis, MO, USA, pp. 1397-1411, June,
10-12, 2009.
[3] Blas M. Vinagre, Concepcion A. Monje , “Fractional Order Control- A Critical Review, Control‖ , 2006 7th Portuguese Conference on Auto- matic Control Instituto Superior Técnico, Lisboa, Portugal Septe m- ber 11-13, 2006.
[4] Monje C. A., Chen Y. Q., Vinagre M., Dingyü Xue, Vicente Feliu, “Fractional-order Systems and Controls - Fundamentals and Applica- tions‖, Springer-Verlag London Limited, 2010.
[5] Shantanu Das, ―Functional Fractional Calculus for System Identifica-
tion and Controls‖, Springer, 2008.
[6] V.Rajinikanth, K.Latha, “Identification and Control of Unstable Bio- chemical Reactor”, International Journal of Chemical Engineering and Applications, Vol. 1, No. 1, pp.106-111, June, 2010.
[7] Schlegel MiloS, Cech Martin, ―The Fractional-Order PID Controller Out Performs The Classical One‖, 7th International Scientific – Technical Conference – PROCESS CONTROL 2006, pp. R146a1 - R146a7, June, 13–16, 2006, Czech Republic.
[8] Igor Podlubny, " Fractional-Order Systems and – Controllers", IEEE Transactions on Automatic Control, VOL. 44, NO. 1, pp. 208-214, January, 1999.
[9] K. Bettou. A. Charef, ―Improvement Of Control Performances Using Fractional PIλDμ Controllers‖, 5th International Symposium on Hydrocarbons & Chemistry (ISHC5), Sidi Fredj, Algiers, May,
23rd to 25th, 2010.
[10] S.Srinivasan, T.Karunanithi, ―Design of PI controller for bio-reactors for maximum production rate”, International Journal of Chem- Tech Research, Vol.2, No.3, pp 1679-1685, July-Sept 2010.
IJSER © 2012