The research paper published by IJSER journal is about New Control Algorithm for Brushless Dc motor Drive i
ISSN 2229-5518
![]()
The low cost BLDC driver is achieved by the reduction of switch device, cost down of control, and saving of hall and current sensors. In this project, a simple position sensorless control strategy for four-switch three- phase BLDC motor drives using single current sensor is proposed. The whole working process of the BLDC motor is divided into six modes. Phase c involves four modes, including modes 2, 3, 5, and 6. Only one switch will work in these modes. In modes 1 and 4, two switches will work simultaneously and current flows through phases a and b. The proposed position sensorless scheme is based on the detection of zero crossing points (ZCPs) of three voltage function that are derived from the difference of line voltages measured at
the terminals of the motor. Unlike the conventional methods,
proposed control strategy has been used only one simple current controller for three phases. The effectiveness of the proposed system has been validated by simulation results.
Brushless DC motors have been widely used in a variety of applications in industrial automation and consumer appliances because of their high power density, compactness, high efficiency, low maintenance and ease of control. Nowadays, many studies have been focused on how to reduce the cost of the BLDC motor and its control system without performance degradation. The cost reduction of variable-speed drives such as BLDC motor drives is accomplished by two approaches. [1]
One is the topological approach and the other is the control approach. From a topology point of view, minimum number of switches and eliminating the mechanical sensors are required for the inverter circuit.
In the control approach, algorithms are designed and implemented in conjunction with a reduced component inverter to produce the desired speed- torque characteristics.[2]
Conventional BLDC motor drives are generally implemented via a six-switch three-phase inverter, three Hall Effect position sensors and two current sensors that generate proper signals for current commutation[3]. However, these sensors have a great number of drawbacks; they increase the cost of the motor and need special mechanical arrangements to be mounted that leads to reduction of the system reliability. Further, Hall sensors are temperature-sensitive and hence limit the operation of the motor.
During the last two decades, a lot of researches on sensorless control techniques of BLDC motors have been conducted.
This research can be divided into four categories.
IJSER © 2012 http://www.ijser.org
The research paper published by IJSER journal is about New Control Algorithm for Brushless Dc motor Drive ii
ISSN 2229-5518
II. BLDC MOTOR OPERATION PRINCIPLE
BLDC motors are truly an inside-out DC commutator with the mechanical commutator replaced by an electronic switching converter.
The stator generates the magnetic field to make the rotor rotate. Hall Effect sensors detect the rotor position as the commutating signals. Therefore, BLDC motors use permanent magnets instead of coils in the armature and do not need brushes. For the three phase BLDC motors the back-EMF and phase current waveforms with 120° conduction mode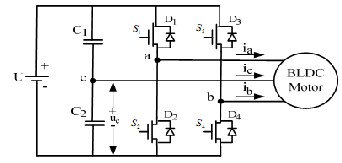
Fig.1Four-switch three-phase inverter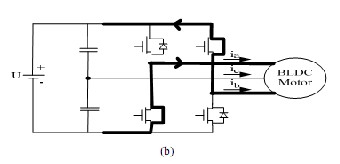
Fig. 1 shows the configuration of a four-switch inverter for a three- phase BLDC motor. As shown in Fig. 1, two common capacitor are used instead of pair of bridges and phase c is out of control because it is connected to the midpoint of the series capacitors.
A BLDC motor needs quasi-square current waveforms, which are synchronized with the back EMFs to generate constant output torque and have 120o conduction and 60o nonconducting regions. Also, at every
instant only two phases are conducting and the other phase is inactive.
Compared with
the conventional six-switch three-phase inverter for the BLDC
motor, the whole working process of the BLDC motor in this paper is divided into six modes,
Phase c involves four modes, including modes 2, 3, 5, and
6. Only one switch should work in the four modes. These modes are divided into two sub operating modes. In modes 1 and 4, phases a and b have current flowing through them, and ic should be zero. To a v o i d
current waveform distortion.
1) Detecting the zero crossing points of the motor terminal to neutral voltage with or without precise phase shift circuit .
2) Back electromagnetic force (EMF) integration method.
3) Sensing of the third harmonic of the back EMF.
4) Detecting the freewheeling diode conduction

The control system adopts the double-loop structure [4]-[6]. The inner current loop maintains the rectangular current waveforms, limits the maximum current, and ensures the stability of the system. The outer speed loop is designed to improve the static and dynamic characteristics of the system. The system performance is decided by the outer loop. If the disturbance caused by the inner loop, it can be limited by the outer loop.
IJSER © 2012 http://www.ijser.org
The research paper published by IJSER journal is about New Control Algorithm for Brushless Dc motor Drive iii
ISSN 2229-5518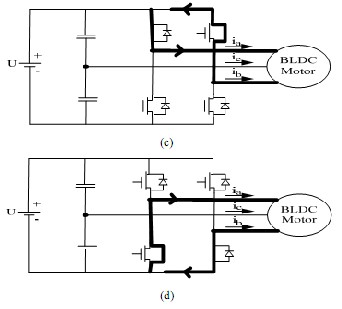
law. Thus the switching function would be determined that was the function of the system state and a associated state dependent control law would result.
In trying to solve multiobjective optimization problems many traditional methods scalarize the objective vector in to a single objective In those cases the obtained solution is highly sensitive to the weight vector used in the scalarization process and demands the user to have knowledge about the underlying problem Moreover in solving multiobjective problems designers may be interested in a set of optimal points instead of a single point Since genetic algorithms (GAs ) work with a population of points it seems natural to use GAs in multiobjective optimization problems to capture a number of solutions simultaneously .
The main criticisms of the NSGA approach have been as follows.
Fig. 2. Sub operating modes of mode1, (a) Mode 11, (b) Mode 12, (c) Mode
13,(d) Mode 14
Sliding mode technique is very effective and was developed for many reasons.
![]() To work with reduced observation error dynamics.
To work with reduced observation error dynamics.
![]() For the possibility of obtaining a step-by-step design.
For the possibility of obtaining a step-by-step design.
![]() For a finite time convergence for all the observation systems.
For a finite time convergence for all the observation systems.
![]() To design, under some condition an observer for the non -smooth systems.
To design, under some condition an observer for the non -smooth systems.
![]() Robustness under parameter variation is possible, if the condition
Robustness under parameter variation is possible, if the condition
(dual of the well-known watching condition) is verified.
A few advantages of the sliding observer.one advantage is the possibility to design an observer for a system with an undetermined but bounded specific variable structure.in nonlinear control theories, the Problem of a nonlinear observer design systems, called the “input injection form”.The sliding mode design approach involves two distinct stages. The first considers the design of a switching function which provides desirable system performance in the sliding mode. The second consists of designing a control law which will ensure the sliding mode, and thus the desired performance, is maintained. The first stage is often termed the existence problem and the reachability problem. Traditionally much of the work in the area of sliding mode observer considered uncertain, often linear, state space systems and the solution of both the existence and reachability problem assumed full state information was available to control
1) High computationalcomplexity of nondominated sorting:
This makes NSGA computationally expensive for large population sizes. This large complexity arises because of the complexity involved in the nondominated sorting procedure in every generation.
2) Lack of elitism:
Elitism can speed up the performance of the GA significantly, which also can help preventing the loss of good solutions once they are found.
3) Need for specifying the sharing parameter:
Traditional mechanisms ofdiversity ina populationsoas togeta wide varietyofequivalent solutions have relied mostly on the concept of sharing. The main problem with sharing is that it requires the specification of a sharing parameter. Though there has been some work on dynamic sizing of the sharing parameter a parameter less diversity-preservation mechanism is desirable.
In general, the count of solutions in all sets from to would be larger than the population size. To choose exactly population members, we sort the solutions of the last front using the crowded-comparison operator in descending order and choose the best solutions needed to fill all population slots. The NSGA-II procedure is also shown in Fig. 5. The new population is now used for selection, crossover and mutation create a new population. It is important to note that we use a binary tournament selection operator but the selection criterion is now based on the crowded-comparison operator. Since this operator requires both the rank and crowded distance of each solution in the population, we calculate these quantities while forming the population , as shown in the above algorithm.
The proposed position sensorless BLDC drive, is based on detection of back
EMF zero crossing from the terminal voltages, similar to sensorless technique that is used in [7] for a six-switch three-phase BLDC motor.
IJSER © 2012 http://www.ijser.org
The research paper published by IJSER journal is about New Control Algorithm for Brushless Dc motor Drive iv
ISSN 2229-5518
Considering a BLDC motor with three stator phase windings connected in star. The BLDC motor is driven by a four-switch three-phase inverter in which the switches are triggered with respect to the rotor position as shown in Fig. 7. The phase a terminal voltage with respect to the star point of the stator .
The first step to start the sensorless drive is to get the initial rotor position. Since only in modes 1 and 4 the BLDC motor is supplied by whole DC bus, the inverter could supply enough power to drive the rotor to an expected position. Therefore, for starting, the motor is simply excites in mode 1 or 4 to force rotor to rotate in the specified direction.[8]
In order to evaluate the effectiveness of the proposed method the drive system shown in fig. was simulated by MATLAB/Simulink.
Fig.3. Simulink model for BLDC motor with feedback
Fig.4.Performance characteristics for BLDC motor. With F.B for stator current
,rotor speed, electromagnetic torque, voltage bus
Fig.5. Speed-Torque characteristics with F.B
IJSER © 2012 http://www.ijser.org
The research paper published by IJSER journal is about New Control Algorithm for Brushless Dc motor Drive v
ISSN 2229-5518

Fig.6. Simulink model for BLDC motor without feedback
Fig.7.Performance characteristics for BLDC motor without F.B for stator
current ,rotor speed, electromagnetic torque, voltage bus
NSGA-II, OPTIMAL SLIDING MODE OBSERVER AND PID PARAMETERS

Fig.8. Speed-Torque characteristics. Without F.B
IJSER © 2012 http://www.ijser.org
The research paper published by IJSER journal is about New Control Algorithm for Brushless Dc motor Drive vi
ISSN 2229-5518
[1] Ozturk, S.B. ; Alexander, W.C; Toliyat, H.A. "Direct torque control of four-switch brushless dc motor with non- sinusoidal back-EMF," IEEE Transactions on Power Electronics 2010, vol. 25, no. 2, pp. 263-
271.
[2] Ozturk, S.; Toliyat, H.A. "Sensorless direct torque and indirect flux control of brushless dc motor with non-sinusoidal back-EMF," IEEE International Industrial Electronics 2008, vol. 3: pp. 1373 -1378.
[3] Design and practical implementation of a back-EMF sliding-mode observer for a brushless dc motor. IET Journal on Electric Power Application 2008, vol. 2, no. 6, pp353-361.
[4] Lei Hao; Toliyat, H.A. "BLDC motor full-speed operation using hybrid sliding m o d e o b s e r v e r ," Eighteenth A n n u a l IEEE Applied Power Electronics Conference and Exposition 2003, vol. 1, pp.
286-293.
[5] Yong Liu; Zi Qiang Zhu; Howe, D. "Instantaneous torque estimation in sensorless direct-torque-controlled brushless dc motors," IEEE Transactions on Industry Applications, vol. 42, no. 5, pp. 1275-1283.
[6] Chen. Z; Tomita, M.; Doki, S; Okuma, S. "New adaptive sliding observers for position- and velocity-sensorless controls of brushless dc motors," IEEE Transactions on Industrial Electronics 2000, vol. 47, no.3, pp. 582-591.
[7] Wilfrid Perruquetti, Jean Pierre Barbo. "Sliding mode control in engineering;" Marcel Dekker Inc, 2002.
[8] Manual of NSGA-II optimization tools, Available at:
http://www.mathworks.com/matlabcentral/fileexchange/10429.
[9] Toliyat HA, Gopalarathnam T. „‟AC machines controlled as DC
machines (Brushless DC machines/electronics)‟‟ In: Skvarenina TL, editor.
IJSER © 2012 http://www.ijser.org