The second data structure proposed in [2] is called R*- tree- Inverted File.
International Journal of Scientific & Engineering Research, Volume 4, Issue 8, August-2013 1137
ISSN 2229-5518
Indexing techniques for Geospatial Searching : A survey
Amruta Joshi, Prof. U. M. Patil
to their joint textual and spatial relevance to the query. In this survey paper, the efficient index, called IR-tree, that together with a top-k document search algorithm is studied along with similar techniques like KR* Trees, and other hybrid indices
—————————— ——————————
An index based on what the object spatial locations is desira- ble, but classical one dimensional database indexing structures are not appropriate to multi-dimensional spatial searching Structures based on exact matching of values, such as hash tables, are not useful because a range search is required Struc- tures using one dimensional ordering of key values, such as B- trees do not work because the search space is multi- dimensional. A number of structures have been proposed for handling multi-dimensional point data [11].
Spatial data objects often cover areas in multi-dimensional spaces and are not well represented by point locations For example, map objects like counties,census tracts etc occupy regions of non-zero size two dimensions Techniques such as relevance feedback, thesaural expansion, and pivoting all pro- vide better quality responses to queries when tested in stand- ard evaluation frameworks
2 INDEXING MECHANISMS
Currently, two types of approaches are used by existing geo-
graphic search engines, namely
1) separate index for spatial and text attributes
2) hybrid index that combine spatial and text attributes.
In this approach, separate index structures are built for spatial data and text data. Based on two indexes, a search generally follows a three step process.
. Step 1: retrieving textually relevant documents with respect to query keywords via a conventional textual index.
. Step 2: filtering out the documents obtained from Step 1 that are not covered by the query spatial scope.
————————————————
• Amruta Joshi is currently pursuing masters degree program in compter engineering in RCPIT, Shirpur, North Maharashtra University, Maha- rashtra, India.
• Prof. U. M. Patil is currently working in RCPIT, Shirpur,Maharashtra, India.
. Step 3: ranking the documents from Step 2 based on the joint
textual and spatial relevances in order to return the ranked results to the user.
The choice of index structure for spatial data can be grid, quadtree, or R*-tree. One commonly used structure is R*-tree [19], and the choice of other indices are also possible. For text, [18] proposed an inverted file index. The inverted file index stores for each keyword, a sorted list of object ids in which the keyword appears, its score, and frequency.
Using this approach, SK queries can be answered in two ways. First, a set of candidate object ids that satisfy the spatial part of the query are retrieved using the spatial index. The object ids are sorted and for each retrieved object id, the textual key- words of the query are looked up in its corresponding invert- ed list index. Finally, all the object ids that satisfy the query are collected, ranked and presented as sorted results to the user. The second approach is to first filter object ids based on the query keywords. Inverted index list for each query keyword are looked up, and a set of object ids that are present in the intersection of the lists are passed to the next stage for, spatial filtering. Finally, the scores for each object are computed by combining the ranking of textual and spatial parts. The per- formance of both approaches depends on the selectivity of the objects satisfying the text or spatial part of a query. If the number of objects in the spatial region of the query is small, it is better to do the spatial filtering first and vice versa. In [11], the choice for the spatial index is a grid and inverted file in- dex for textual keywords.
In [3], the authors propose a number of improved techniques
to the above basic approaches. First, they suggest storing spa-
tial data in the disk by following Hilbert curve ordering [6].
This ordering maintains the spatial closeness of objects there-
by speeding up the disk access operations in retrieving the
spatial data. Secondly, the objects in the inverted index list are
assigned ids according to Hilbert ordering and sorted based
on these ids. A grid-based structure is built in memory to store
the ids of the spatial data in each tile of the grid. When a query
is issued by the user, the relevant tiles of the grid that overlap
the spatial region of the query are retrieved. The object ids
contained in the tiles are sorted and looked up against the in-
verted indices.
Advantages and Limitations: The main advantage of the
above strategies is the ease of maintaining two separate indi-
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 8, August-2013 1138
ISSN 2229-5518
ces. However, the main performance bottle -neck lies in the number of candidate objects generated during the filtering stage. If spatial filtering is done first, many objects may lie within a query’s spatial extent, but very few of them are rele- vant to the query keywords. This increases the disk access costs by generating a large number of candidate objects. The subsequent stage of keyword filtering becomes expensive. The same is true, if keyword filtering is done first. Moreover, the above strategies assume a memory resident spatial index which is not reasonable for large GIR databases. By A. Ntoulas and J. Cho, this issue is discussed by proposing to reduce the granularity of spatial index, so that it fits in main memory. However, if the grid is too coarse, it loses its pruning capabili- ties. We build a disk resident spatial index.
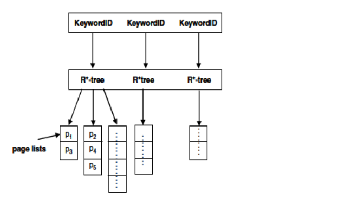
Hybrid indexing techniques combine the spatial and inverted file indices. A. Ntoulas and J. Cho, the inverted list was modi- fied as the following. The list for each keyword was augment- ed with the space in which the objects contained in the list appear. For instance, if w1 is the keyword, its list was aug- mented as: w1 = {r1(o1, o2, ...), r2(o2, ...), ....} where r1, r2, .. are bounding rectangles in space. When a query is issued, the cor- responding keyword lists are loaded, and objects are filtered using the associated spatial index. This strategy still requires scanning the entire list. The closest work to ours is the hybrid indexing structures proposed in [22]. The first hybrid data structure shown in Figure 2 is called Inverted File-R*-tree.
The second data structure proposed in [2] is called R*- tree- Inverted File.
Fig. 2.1 Structure of first inverted file then R*-tree
The name of a location and every word of a document are com- bined as a new word. Then, an inverted file based on those new words is created to support geographic searches. However, this approach simply treats locations as texts and cannot deal with various spatial relevance computations. On the other hand, two hybrid indexes are proposed, namely, 1) an inverted file on top of Rtrees referred to as HybridI, and 2) an R-tree on top of inverted files referred to as HybridR. Thus, a search upon HybridI first locates a collection of documents based on search keywords and then based on locations. The
search strategy is reversed for HybridR. However, these hy-
brid indexes do not integrate the textual filtering and spatial filtering seamlessly.
Along the same line, IR2-tree [8] builds an R-tree and uses signature files (rather than a set of words) to record the docu- ment words associated with nodes in the index.
Signature files reduce the storage overhead and R-tree can quickly determine the documents spatially covered by a query spatial scope. However, signature file can only determine whether a given document contains query keywords but fail to order them based on the textual relevance.
Advantages and Limitations:
The first approach proposed in “Processing Spatial-Keyword
(SK) Queries in Geographic Information Retrieval (GIR) Sys-
tems” is highly insensitive to SK queries with the AND se-
mantics. This approach does not take advantage of the associa-
tion of keywords in space. Hence, when query contains key-
words that are closely correlated in space, this approach suf-
fers from paying extra disk costs accessing different R*- trees
and high overhead in the subsequent merging process. In the
second approach proposed in [9], the leaf nodes point to in-
verted index lists that are usually small. This is because any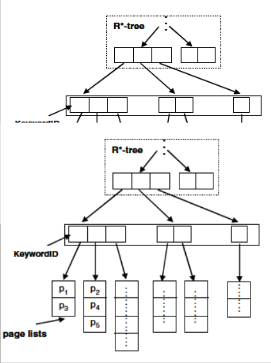
he entire data
keywords that
This approach
eyword filter-
main disad-
nerates many
Fig. 2.2 Structure of first R*tree then inverted file
Implicit Locations :
There are several possible solutions to the implicit location
problem. One method is to use query expansion based on
pseudofeedback [4]. The idea is to find the most relevant loca-
tions to the original query location from the returned docu-
ments, and then use those locations to compose a new query.
The shortcoming of the pseudo-feedback approach is that it
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 8, August-2013 1139
ISSN 2229-5518
depends on the documents so much that many irrelevant loca- tions might be added to the new query. Another method is to expand the query based on gazetteers. The locations that are covered by the query location will be used for expansion. Un- fortunately, we may come up with a very long
query after such an expansion because too many children loca- tions will be added. Moreover, such a long expansion will greatly affect the retrieval speed. Geo-index structures like gridbased index and R*-tree can solve the implicit location problem
too. In this paper, we assume the query location is input by text which is common for current search engines.in the ap- proach, explicit locations and implicit locations are indexed together and different geo-confidence scores are assigned to them. The advantage of this mechanism is that no query expansion is necessary and implicit location information can be computed offline for fast retrieval.In [6], the authors con- cluded that the most common geographical relationship used in queries is “in”. Actually, if no spatial relationship exists in the query, we can safely assume the relationship is “in”. In this paper, we adopt two types of geo-indexes: one is called focus- index, which utilizes the inverted index to store all the explicit, and implicit locations of documents (see Figure 1); the other is called grid-index, which divides the surface of the Earth into
1000 × 2000 grids. All the documents will be indexed by these grids according to their geo focuses. The reason for adopting grid-index is that some topics in GeoCLEF can’t be solved by only focus-index due to the spatial relationship other than “in” (like “near ”). For focus-index, the matched docID list can be retrieved by looking up the locationID in the inverted index. For grid-index, we can get the docID list by looking up the grids that the query location covers. We first retrieve two lists of documents relevant to the textual terms and the geograph- ical terms respectively, and then merge them to get the final results. A combined ranking function
Rcombined = Rtext × α Rgeo × (1- α),
where Rtext is the textual relevance score and Rgeo is the geo-
confidence score, is computed and used to re-rank the results.
Experiments show that
textual relevance scores should be weighted higher than
georelevance scores. In these projects, the main objective is to
address the extraction of geographic references found in the
text by using ontologies, gazetteers, thesaurus, etc., and con-
vert them to coordinates for retrieving DL contents using ge-
ography.
In the context of geographic search engines, there are numer-
ous academic projects. Most of them can be broadly classified
under 1) work that focused on extraction of geographic refer-
ences from documents and/or 2) efficient query processing.
We will briefly describe a few of these. In GeoSearch System
[10], the geographic scope of Web pages are extracted by ana-
lyzing the geographic references in text as well as the geo-
graphic location where the Web sites are registered. In [15], the
focus is on improving the extraction techniques. In particular,
after the relevant geographic references are extracted, ambigu-
ities such as multiple place name references and alternate
place names are resolved using techniques such as geo-
matching and geo-propagation.
In the context of query processing for GIR, indexing tech- niques for processing text and geographic data are the main focus. In [7], a simple inverted index structure for text and grid file for geographic data are used. They propose a hybrid index structure in which each keyword is combined with dif- ferent partitions of space. In effect what they are proposing is similar to [9].
In a recent work [3], the authors propose to maintain individ- ual indices for spatial and textual data. They propose various approa-ches to retrieve data from each index before the final merging of results. The spatial objects indexed in their applica- tions are complex footprints that are extended regions in space. They approximate them by using MBRs and use memory-resident spatial index. Their approach does not scale well with increasing size of the dataset. To alleviate the prob- lem, they propose to compress the MBRs, but the attempt gen- erates large candidate set that
needs to be fetched from the disk, with a high rate of false pos- itives. This will become a major performance bottleneck for large scale GIR applications. In our work, we use disk-resident spatial index for GIR applications. Our data structure per- forms significantly better than their approach with respect to two aspects:
1) first it reduces the number of disk accesses in identifying the candidate objects and as a consequence
2) it reduces the overhead in merging the candidate objects.
In “Hybrid Index Structures for Location-based Web
Search”another very related work, the authors proposed a
hybrid index by combining the spatial and inverted list struc-
tures. Their approaches either use multiple R*-trees to answer
queries or generates more candidates for further filtering.
First of all, a keyword-based search may retrieve a large num-
ber of textually relevant documents that are outside the spatial
scope. Although it is possible to reorder Steps 1 and 2 based
on their selectivities, performance improvement is rather lim-
ited if the selectivities in Steps 1 and 2 are both high. Besides,
the ranking process is not incremental, i.e., it has to sort all of
the candidate documents based on the joint textual and spatial
relevances
in Step 3 in order to find the top-k documents. As the total
number of candidate documents is usually much larger than k,
document ranking becomes very expensive. Further, these
three steps are performed sequentially, prolonging the
processing time and requiring a large memory storage to buff-
er intermediate results between steps.
To improve the search efficiency, Approach II combines the
spatial locations and textual contents of documents together
and builds one index on them.
3.1 Inverted File and R*-tree Double Index
In this structure, web pages are indexed separately twice, once by R*-tree and once by inverted files. All MBRs are indexed by an R*-tree. The difference from conv-entional R*-tree is that each leaf node of the MBR tree points to a page list whose scope includes this MBR. Inverted files are the same to con- ventional search engines. Thus we have two kinds of page lists whose entry is either an MBR or a keyword. A location-based
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 8, August-2013 1140
ISSN 2229-5518
web search comprises non-spatial keywords and query region and/or specified spatial query types. Non-spatial query key- words are retrieved similar to conventional inverted files, while query region and spatial query type are passed to the R*-tree. The final results are the merge of page lists from two indexes.
The storage in disk comprises the two kinds of page lists and the R*-tree. The storage of page lists depends on the length of each list, whose unit is the identifier of a page Assuming the length of the list whose
entry is keyword k is PK(k) and the length of the list whose entry is MBR m is PM(m)
So, the main cost of storage in disk is caused by two kinds of page lists above. For the storage of the identifier of pages is about a fixed value, the storage is mainly determined by the total length of all page
lists. The time of loading page lists is determined mainly by the number and total length of lists. The merge processing depends on the total length of these page lists.
For each page list with an entry is a keyword in the first hy- brid structure, these pages in the list are assigned to different MBRs according to their geographical scope. R*-tree is built on these MBRs, to get a set of page lists whose entry is deter- mined by a pair of a keyword and an MBR. A pair of a key- word and an MBR is named a geo-keyword if there is a page which includes the keyword and whose scope includes the MBR. The scale of R*-trees is smaller. The cost of storage in disk is mainly caused by the total length of page lists whose entry is a geo-keyword. Assume that the number of geo- keywords for a query Q of m keywords and n MBRs is g(Q). The online computation includes: (1) first to retrieve the m query keywords; (2) to search in the corresponding
R*-trees whose number is m and the average leaf node is M , and to find some MBRs and their corresponding page lists, the number of lists got from m R*-trees is g(Q); (3) to merge these g(Q) page lists.
The retrieval for m keywords is implemented by a hashing function, and the time is ignored. So, Besides the retrieval of m R*-trees, there are also two main factors for online search. One factor is caused by the total length of the page lists whose en- try is a geo-keyword, the number of lists is g(Q). The other factor is the time to read these g(Q) page lists from disk. The main storage in disk includes the page lists whose entry is a geo keyword and the R*-tree. The main cost of storage in disk is caused by the total length of page lists whose entry is a geo- keyword.
D. Felipe, V. Hristidis, and N. Rishe, states in the paper "Key-
word Search on Spatial Databases,"IR2-tree builds an R-tree
and uses signature files (rather than a set of words) to record
the document words associated with nodes in the index. Sig-
nature files is used to reduce the storage overhead and R-tree
can quickly determine the documents spatially covered by a
query spatial scope. However, signature file can only deter-
mine whether a given document contains query keywords but
can’t order them based on the textual relevance. [8]
TABLE 1:
LITERATURE SURVEY OF INDEXING DATA STRUCTURES
Zhisheng Li, Chong Wang,et.al, proposed a new indexing strategy called KR*-tree, which is an acronym for Keyword-R*- tree. We measure the effectiveness of indexing strategies in answering SK queries with respect to the following criteria:
• Pruning text and space.
• Handling queries with multiple keywords.
First, the indexing methods previously proposed use the prun-
ing power of space and text, either separately or one followed
by the other. As a consequence, SK queries are answered in a
two-step filtering process, space followed by text or vice-versa.
In KR*-tree, we exploit the pruning power of both space and
text simul-taneously, thus merging the two steps into one. Sec-
ondly, in previous methods the keywords are maintained sep-
arately. Hence queries are answered by the intersection of ob-
ject ids from the inverted index file or R*-trees of query key-
words. In KR*-tree, we capture the joint distribution of key-
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 8, August-2013 1141
ISSN 2229-5518
![]()
words and hence the object ids containing the query keywords are directly obtained without merging any lists. These charac-
enviro
teristics greatly enhance the performance of KR*-tree in an- swering SK queries. At the outset, KR*-tree is similar to R*-tree- Inverted File data structure, but with the following modify- cations.
• All internal and leaf nodes of KR*-tree are augmented with a set of distinct keywords that appear in the space covered by the nodes. Thus, many keywords appear in the upper level nodes of the tree and smaller number of keywords appear in the lower level nodes of the tree.
• Since the number of keywords that appear in each node var- ies, we do not store the keywords in the node. We construct a special list called KR*-tree List that stores the keywords ap- pearing in the nodes[9].
Limitations of KR*-tree :
KR*-tree and IR2-Tree are not efficient due to separation of
document search and document ranking. After the document
search step, a large number of candidate documents are usual-
ly retrieved but only k of them are returned after document
ranking. Consequently, the evaluation of those nonresult can-
didates is a waste. Although KR*-tree, IR2-Tree and IR-tree are
built on top of R-tree, they are very different in terms of struc-
tures, functionalities, and extensibility to searches with vari-
ous relevance requirements[9].
TABLE 2.
OPTIMIZING TECHNIQUES FOR REDUCING QUERY COST
IR-tree, proposed by Zhisheng Li, et.al. is an efficient index that provides the following required functions for geographic document search and ranking:
1) Spatial filtering: all the spatially irrelevant documents have to be filtered out as early as possible to shrink the search space;
2) Textual filtering: all the textually irrelevant documents have to be discarded as early as possible to cut down the search cost; and
3) relevance computation and ranking: since only the top-k documents are returned and k is expected to be much smaller than the total number of relevant documents, it is desirable to have an incremental search process that integrates the compu- tation of the joint relevance and document ranking seam- lessly so that the search process can stop as soon as identifica- tion of the top-k docu-ments. IR-tree is designed by taking into account the storage and access overheads since a docu- ment set is very large in terms of numbers of documents and their words.
IR-Tree Structure
In order to support efficient geographic document search, the
IR-tree proposed by Zhisheng Li, et.al. clusters a set of docu-
ments into disjointed subsets of documents and abstracts them
in various granularities. By doing so, it enables the pruning of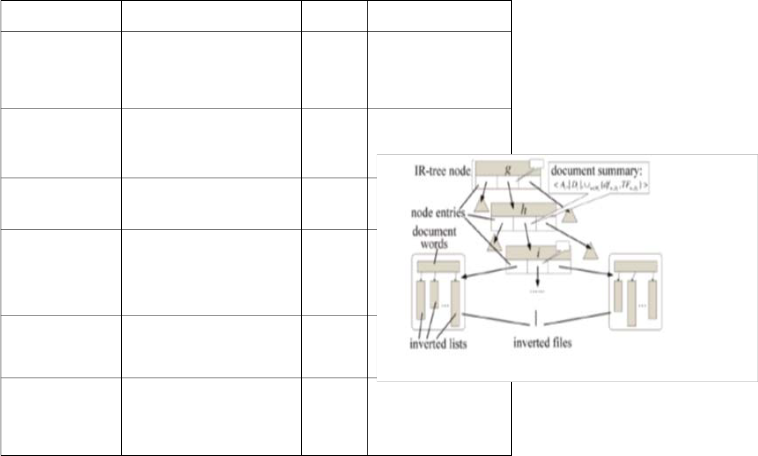
irrelevant subsets. The effi-ciency of IR-tree depends on its
Author Publication Year Rperumnairnkgs power, which, is highly related to the
effectiveness of document clustering and the search algo-
Alexandros Ntou-
las_
Junghoo Cho†
S. B¨uttcher and C. L. A. Clarke
V. N. Anh and A. Moffat.,
D. Carmel, D. Co- hen, R. Fagin, E. Farchi, M. Her- scovici, Y. Maarek,
and A. Soffer.
V. N. Anh, O. de Kretser, and A. Moffat
S. Chaudhuri and
L. Gravano
Pruning Policies for Two-
Tiered Inverted Index
with Correctness Guarantee
A document-centric ap- proach to
static index pruning in text
retrieval systems
. Pruning strategies for mixed-mode
querying.
Static index pruning for in- formation retrieval systems
Vector-space ranking with effective early termination.
Optimizing queries over multimedia
repositories.
SIGIR’07
.
CIKM,
2006.
CIKM,
2006.
SIGIR,
2001.
SIGIR,
2001.
. In SIG- SIG- MOD,
1996
Irtitihs mbass.eIdR-otnretewcolutisrteers spa-
itniadlelxyinclgosetradtoecguymanednts together and carries textual information
pinruintisnngoadt etws.oTlheevseelsdesigns distinguish IR-tree from other hy-
vbirzi.dteixntdperxuensi.nIgRa-tnrdee associates each leaf entry with an invert-
deodcufimleeannt dpruanssinogci.ates adocument summary that provides tex-
Ittuuasleisnsftoartmicaitnidoenxof docu-ments with each node so that the tf
parnudninidgfalvoanlugews iothf tthhee document words can be estimated at
dnoocduems ewnittphrouuntinegxa.mining individual documents.
It prunes text and doc- ument combined with each other.
It used the pruning strategy on the static indices given for the documents instead of document pruning.
It used an index with a ranking associated with it to reduce the search query cost.
It has the specific re-
Fig. 3.3 Structure of IR-Tree [1]
pository for multimedia
updates to reduce the
Figure 3.3 depicts an IR-tree indexing structure. An inverted
updating query costs in
file consists of a list of words, with each corresponding to a
frequently changing
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 8, August-2013 1142
ISSN 2229-5518
word w and pointing to a list of documents that contain w. Then, for each node i, a document summary about a set of documents Di indexed beneath i is captured as a three-element tuple: Each document d in a given document set D a set of words Wd , associated with a location Ld for each node i, a document summary about a set of documents D i
<Ai,│D i│; U w єWi {df wDi ,TF w, Di }>
Ai the minimal bounding box covering all of the loca- tions Ld of documents d in Di
Wi{df wDi,TF w, Di } -: each word w that appears in at
least one document in D i (i.e., Wi), Next, ,|Di| refers to the cardinality
of the document set Di . The third element is a set
of(dfwDi,TF w,Di ) pairs. For each word w that appears in at least
one document in Di (i.e., Wi), dfwDi represents the number of
documents in Di that contain w and TFw;Di is the aggregated
information about the tf values of w in Di. We investigate two
different representations of TFw;Di , Notice that the document
summary of a non root node i is stored with i's parent node h.
Then, given a query that reaches i's parent node h, it can de-
cide whether i contains potential result documents (i.e.,
whether the examination of i is necessary)based on the docu-
ment summary.
[1]Zhisheng Li, Ken C.K. Lee, Member, IEEE, Baihua Zheng, Member, IEEE, Wang-Chien Lee, Member, IEEE, Dik Lun Lee, and Xufa Wang, IEEE, “IR-Tree: An Efficient Index for Geographic Document Search”, Transactions on knowledge and data engineering, vol. 23, no. 4, April 2011 [2]moonbae song, hiroyuki kitagava , “managing frequent updates in R- trees for update-intensive applications”, IEEE Trans. Knowledge and Data Eng. (TKDE), vol. 21, no. 11, pp. 45-55, Nov./Dec. 2009.
[3]A. Ntoulas and J. Cho, “Pruning Policies for Two-Tiered Inverted Index with Correctness Guarantee,” Proc. ACM SIGIR ’07, pp. 191-198, 2007.
[4]S. Shekhar, S. Chawla, S. Ravada, A. Fetterer, X. Liu, and C.-T. Lu,“Spatial Databases—Acco4mplishments and Research Needs,” IEEE Trans. Knowledge and Data Eng. (TKDE), vol. 11, no. 1, pp. 45-55, Jan./Feb. 1999.
[5] Y. Zhou, X. Xie, C. Wang, Y. Gong, and W.-Y. Ma, “Hybrid Index Struc- tures for Location-Based Web Search,” Proc. 14th ACM Int’l Conf. Infor- mation and Knowledge Management (CIKM ’05), pp. 155-162, 2005.
[6] I.D. Felipe, V. Hristidis, and N. Rishe, “Keyword Search on Spatial
Databases,” Proc. IEEE 24th Int’l Conf. Data Eng. (ICDE ’08),pp. 656-665,
2008.
[7] A. Guttman, “R-Trees: A Dynamic Index Structure for Spatial Search- ing,” Proc. ACM SIGMOD ’84, pp. 47-57, 1984.
[8] R. Hariharan, B. Hore, C. Li, and S. Mehrotra, “Processing Spatial- Keyword (SK) Queries in Geographic Information Retrieval (GIR) Sys- tems,” Proc. 19th Int’l Conf. Scientific and Statistical Database Manage- ment (SSDBM ’07), pp. 16-25, 2007.
[9] Ramaswamy Hariharan, Bijit Hore, Chen Li, Sharad Mehrotra, Pro- cessing Spatial-Keyword (SK) Queries in Geographic Information Retriev- al (GIR) Systems, Proc. 19th Int’l Conf. Scientific and Statistical Database Management (SSDBM ’07), pp. 16-25, 2008.
[10] Zhisheng Li1, Chong Wang2, Xing Xie2, Xufa Wang1, Wei-Ying
Ma2,Indexing implicit locations for geographical information Retrieval, Proc. 19th Int’l Conf. Scientific and Statistical Database Management
(SSDBM ’07), pp. 16-25, 2009.
[11] Nieves R. Brisaboa ,Miguel R. Luaces , Ángeles S. Places ,Diego Seco “Exploiting Geographic References of Documents in a Geographical In- formation Retrieval System Using an Ontology-based Index”., Proc. Third Workshop Geographic Information Retrieval (GIR ’06), 2006.
IJSER © 2013 http://www.ijser.org