International Journal of Scientific & Engineering Research, Volume 3, Issue 3, March-2012 1
ISSN 2229-5518
Genetic Programming Model for Hadronic
Collisions
*Mahmoud Y. El-Bakry
Tabuk University, Faculty of Science, Department of Physics, Tabuk, KSA.
*Moaaz A. Moussa
Buraydah Colleges, Al-Qassim, Buraydah, King Abdulazziz Road, East Qassim University, P.O.Box 3 1717, KSA.
moaaz2030@Yahoo.com
**A. Radi, ***E. El-dahshan
Ain Shams University, Faculty of Science, Department of Physics, Abbassia, Cairo, Egypt
**The British University in Egypt (BUE).
***Egyptian E-Learning University- 33 El-mesah St., El-Dokki- Giza- Postal code 12611.
M. Tantawy
*Ain Shams University, Faculty of Education, Department of Physics, Roxi, Cairo, Egypt.
charged particles multiplicity distribution of created pions from antiproton-neutron ( p
![]()
n ) and proton-neutron ( p
![]()
n ) interactions at high energies. The
predicted distributions from the GP-based model are compared with the available experimental data. The discovered function of GP model has proven matching better for experimental data.
Index Terms—Genetic Programming; Hadronic Collisions; High Energy Physics.
—————————— ——————————
One of the fundamental interactions in high-energy physics
model the multiplicity distribution of charged pions for differ-
(HEP) is the antiproton-neutron ( p![]()
n ) and proton-neutron
ent beams in hadronic collisions. The history of studies of![]()
( p n ) interactions particularly above the pion production threshold. Extremely high energy collisions are required to get the fundamental particles close enough to study and under- stand the interactions between them [1–6]. Different models are provided for the hadron structure [7–10], such as the three-
these interactions is therefore very long and extremely inter- esting from both the experimental and theoretical points of view [34,35]. Making use of the capability of the evolutionary computation, the present work uses the genetic programing to model the charged particles multiplicity distribution for
fireball model [11], quark models [12–14], fragmentation mod-![]()
( p n ) and ( p![]()
n ) interactions at different lab momenta. Also,
el [15–17] and many others.
The application of artificial intelligence (or the machine
learning) such as genetic programming (GP) has a strong
presence in the high energy physics [18–22]. The effort to un-
derstand the interactions of fundamental particles requires
complex data analysis for which machine learning (ML) algo-
rithms are vital. Machine learning (ML) algorithms are becom-
ing useful as alternate approaches to conventional techniques
GP has been used to discover a function that calculates multip- licity distribution for different beams. The rest of the paper is organized as follows: Sec. 2 gives a review to the basics of the GP technique. Section 3 explains how genetic programing is used on modeling the hadron-hadron collisions. Finally, the results and conclusion are provided.![]()
[23]. The complex behavior of the ( p![]()
n ) and ( p
n ) interac-
tions due to the nonlinear relationship between the interaction parameters and the output often becomes complicated. In this sense, ML techniques such as artificial neural network [24], genetic algorithm [25] and genetic programming [26] can be used as alternative tool for the simulation of these interactions [18–22, 27–32].
The motivation of using a GP approach is its ability to evolve a model based entirely on prior data without the need of making underlying assumptions. Another motivation for applying such machine learning approach (e.g. GP) is simply the lack of knowledge (in most cases) about the mathematical dependence of the quantity of interest on the relevant meas- ured variables [33].
In the present work, we illustrate the GP technique to
Genetic programming is an extension to Genetic Algorithms
(GA). GA is an optimization and search technique based on
the principles of genetics and natural selection. A GA allows a
population composed of many individuals (chromosome) to
evolve under specified selection rules to a state that maximizes
the ―fitness‖ (i.e. minimizes the cost function). The GP is simi-
lar to genetic algorithms but unlike the latter its solution is a
computer program or an equation as against a set of numbers
in the GA. A good explanation of various concepts related to
GP can be found in Koza (1992) [26, 36].
In GP a random population of individuals (equations or com-
puter programs) is created, the fitness of individuals is eva-
luated and then the ‗parents‘ are selected out of these individ-
uals. The parents are then made to yield ‗offspring‘s‘ by fol-
lowing the process of reproduction, mutation and crossover.
IJSER © 2012
International Journal of Scientific & Engineering Research Volume 3, Issue 3, March-2012 2
ISSN 2229-5518
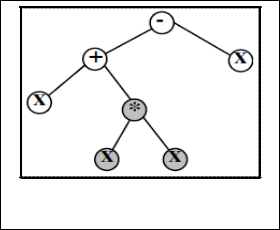
The creation of offspring‘s continues (in an iterative manner) until a specified number of offspring‘s in a generation are produced and further until another specified number of gen- erations are created. The resulting offspring at the end of all this process is the solution of the problem. The GP thus trans- forms one population of individuals into another one in an iterative manner by following the natural genetic operations like reproduction, mutation and crossover. Each individual contributes with its own genetic information to the building of new ones (offspring) adapted to the environment with higher chances of surviving This is the basis of genetic algorithms and programming. The representation of a solution for the problem provided by the GP algorithm is a tree (Fig. 1).
―Figure 1. Tree representation of the equation
(x x2 x) ‖
Genetic programing is a technique that mimics natural evolution and improvement of life through reproduction to find a computer program that solves a particular task. It is inspired by the Darwinian principle ―the most fit chromosome duals have the greatest chance of surviving and passing into the next generation‖ [37]. Each chromosome contributes with its own genetic information to the building of new ones (offspring) adapted to the environment with higher chances of surviving. This is the basis of genetic algorithms and program- ing [38]. Genetic programing searches the space of computer programs, or the space of functional forms specified by com-
TABLE 1
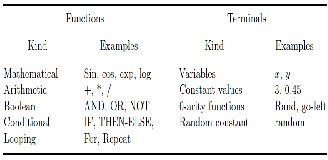
TYPICAL FUNCTIONS AND TERMINALS USED IN GP.
positions of functions from a function set acting on terminals from the terminal set. The chromosome represents the model of the problem solution using trees. A tree is a model repre- sentation that contains nodes and leaves. Nodes are mathe- matical operators from the specified function set. Leaves are terminals from the specified terminal set [38]. Table 1. shows some typical functions and terminals used in GP.
Trees are manipulated through the basic genetic operators: crossover (sexual recombination operation), mutation (asex- ual operation), and reproduction.
Crossover (Sexual Recombination) Operation: In the cros- sover or sexual recombination operation, two parental pro- grams are probabilistically selected from the population based on fitness. The two parents participating in crossover are usually of different sizes and shapes. A crossover point is ran- domly chosen in the first parent and a crossover point is ran- domly chosen in the second parent. Then the sub-tree rooted at the crossover point of the first, or receiving, parent is de- leted and replaced by the sub-tree from the second, or contri- buting, parent. Crossover is the predominant operation in ge- netic programing (and genetic algorithm) work and is per- formed with a high probability.
Mutation Operation: In the mutation operation, a single parental program is probabilistically selected from the popula- tion based on fitness. A mutation point is randomly chosen, the sub-tree rooted at that point is deleted, and a new sub-tree is grown there using the same random growth process that was used to generate the initial population. This asexual muta- tion operation is typically performed sparingly (with a low probability of, say, 1% during each generation of the run).
Reproduction Operation: The reproduction operation cop- ies a single chromosome, probabilistically.
In order to apply the genetic programing technique to a problem, one must first perform the preparatory steps and the executional steps [39]. The preparatory steps are the problem- specific and domain-specific steps that are performed by the human user prior to launching a run of the problem-solving method. The executional steps are automatically executed dur- ing a run of the problem-solving method. The five major pre- paratory steps for the basic version of genetic programing re- quire a human user to specify:![]()
I the set of terminals,![]()
II the set of primitive functions,![]()
III the fitness measure,![]()
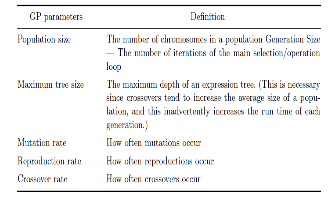
IV certain GP parameters (see Table 2) for controlling
the run, and![]()
V a termination criterion and method for designating
the result of the run.
The fitness function defines the quality of chromosome as a solution to the problem. The dataset is divided into two parts: one is for training and the second for validation. The training dataset is used to obtain the model and the validation dataset
is used to measure the accuracy of the model with data that was not used in training. The fitness function evaluates how accurate the mathematical model.
IJSER © 2012
International Journal of Scientific & Engineering Research Volume 3, Issue 3, March-2012 3
ISSN 2229-5518
The GP is implemented using the experimental data to si-
mulate multiplicity distribution of charged particles
P(nch) for
![]()
p n collisions at the given range of energies. The GP model
was constructed with training sets and the accuracy was veri- fied by the test sets. In order to generate the GP model we have implemented the GP steps (Fitness evaluation, reproduc- tion, crossover and mutation) that were mentioned in Section
3. Table 3 lists the values of the control parameters and the set of function genes that are used in modeling the multiplicity distribution. Our discovered function is generated using the obtained control GP parameters as follows,
P(nch)
![]()
(sqrt(log(
+ (5/Y))))/ (sqrt(exp(X))/((Y/7)+ (3/2)))
“Figure 2. Comparison between the experimental and simulated
multiplicity distribution of pions
P(nch ) for p
n and p
n colli-
+((sqrt(Y)/(1+ 2)) + ((2/5)+ (2/3)))));
TABLE 3
Lists the values of the control parameters used in multip- licity distribution
sions at a) 50, b) 80, c) 100, d) 200 GeV/c: (—) GP model, (O)
experimental data”.
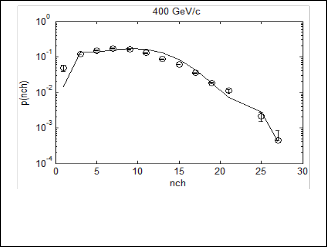
“Figure 3. Comparison between the experimental and predicted
multiplicity distribution of pions
P(nch ) for p
n collision at 400
where the actual parameters are, X = number of charged
GeV/c: (—) GP model, (O) experimental data”.
particles
(nch ) , Y = lab momentum ( PL ). After simplification
and putting the corresponding values, the final form of the
discovered equation becomes
Genetic programming, with its advantage of discovering ma- thematical equations, has been shown to be an efficient me-
P(nch)
![]()
(sqrt(log(
ch + (5/ PL ))))/((sqrt(exp(nch ))/(( PL/7)
thod for modeling the antiproton-neutron ( p![]()
n ) and proton-
+(3/2)))+ ((sqrt(PL )/(1+ 2)) +
((2/5)+ (2/3)))));
![]()
This discovered function has been used to predict the mul- tiplicity distribution of pions for antiproton- neutron ( p n )
TABLE 2
DEFINITION OF THE GP PARAMETERS.
and proton-neutron ( p![]()
n ) interactions.
Simulation results based on GP model, for modeling the multiplicity distribution of pions for antiproton-neutron![]()
( p n ) and proton-neutron ( p![]()
n ) interactions at PL
![]()
50,80
GeV/c for p![]()
n and PL
![]()
100,200
GeV/c for p![]()
n (the training
cases) are given in Fig. 2(a, b, c, d) respectively. While Fig. 2
describes the predicted results of PL![]()
400 GeV/c for p
![]()
n inte-
raction, we notice that the curves (for training cases and pre-
diction case) obtained by the trained GP model show a best
fitting to the experimental data in the five cases. Then, the GP
model is able to exactly model for multiplicity distribution at
lab momenta for different beams in h-h collisions. If the large
dataset is used in training, the best GP model is obtained.
neutron ( p
n ) interactions particularly above the pion pro-
IJSER © 2012
International Journal of Scientific & Engineering Research Volume 3, Issue 3, March-2012 4
ISSN 2229-5518
duction threshold. This paper presents an efficient approach
ger, Berlin, 2003)
for calculating the multiplicity distribution
P(nch ) of charged
[33] H. Etemadi, A.A.A. Rostamy, H.F. Dehkordi, Expert Syst. Appl. 36,
particles, at different values of high energies through the ob-
tained discovered functions. The discovered function shows
an excellent match to the experimental data. Moreover, the
discovered function is capable of predicting the experimental
data that are not used in the training set. The present study
has shown that the GP approach can be employed successfully
to model the h-h interactions at high energies. Finally, we con-
clude that GP has become one of important research areas in
the field of hadron-hadron collisions.
[1] B. Alessandro et al. (ALICE Collaboration), J. Phys. G: Nucl. Part. Phys.
32, 1295 (2006).
[2] [F. Carminati et al. (ALICE Collaboration), J. Phys. G: Nucl. Part. Phys.
30, 1517 (2004)
[3] [D.G. d‘Enterria et al. (CMS Collaboration), J. Phys. G: Nucl. Part. Phys.
34, 2307 (2007)
[4] G.L. Bayatian et al. (CMS Collaboration), J. Phys. G: Nucl. Part. Phys.
34, 995 (2007)
[5] G. Aad et al. (ATLAS Collaboration), arXiv:0901.0512v4 [hep-ex]
[6] A. Augusto Alves et al. (LHCb Collaboration), J. Instrum. 3, S08005 (2008)
[7] M. Tantawy, M. El Mashad, M.Y. Elbakry, Indian J. Phys. Pt-A 72, 110
(1998)
[8] E. Fermi, Prog. Theor. Phys. 5, 570 (1951)
[9] E. Fermi, Phys. Rev. 81, 683 (1950)
[10] J. Ranft, Phys. Lett. B 31, 529 (1970)
[11] Cai Xu, Chao Wei-qin, Meng Ta-chung, Phys. Rev. D 33, 1287 (1986)
[12] Y. Nambu, Sci. Am. 235, 45 (1976)
[13] M. Gyulassy, Prog. Part. Nucl. Phys. 15, 403 (1985)
[14] L.S. Kisslinger, Nucl. Phys. A 446, 479 (1985)
[15] M. Jacob, R. Slansky, Phys. Rev. D 5, 1847 (1972)
[16] R. Hwa, Phys. Rev. D 1, 1790 (1970)
[17] R. Hwa, Phys. Rev. Lett. 26, 1143 (1971)
[18] L. Teodorescu, D. Sherwood, Comput. Phys. Commun. 178, 409 (2008)
[19] L. Teodorescu, IEEE T. Nucl. Sci. 53, 2221 (2006)
[20] J.M. Link, Nucl. Instrum. Meth. A 551, 504 (2005)
[21] S. Yaseen El-Bakry, Amr Radi, Int. J. Mod. Phys. C 18, 351 (2007)
[22] E. El-dahshan, A. Radi, M.Y. El-Bakry, Int. J. Mod. Phys. C 20, 1817 (2009)
[23] S. Whiteson, D. Whiteson, Eng. Appl. Artif. Intel. 22, 1203 (2009)
[24] S. Haykin, Neural Networks: A Comprehensive Foundation (IEEE
Press and Macmillan College Publishing Company, New York, NY,
1994)
[25] J.H. Holland, Adaptation in Natural and Artificial Systems (University of
Michigan Press, Ann Arbor,1975)
[26] J.R. Koza, Genetic Programming: On the Programming of Computers by means of Natural Selection (The MIT Press, Cambridge, MA, 1992)
[27] K. Cranmer, R.S. Bowman, Comput. Phys. Commun.167, 165 (2005)
[28] M.Y. El-Bakry, A. Radi, Int. J. Mod. Phys. C 18, 329 (2007)
[29] M.Y. El-Bakry, K.A. El-Metwally, Chaos Soliton. Fract. 16, 279 (2003)
[30] K.A. El-Metwally, T.I. Haweel, M.Y. El-Bakry, Int. J. Mod. Phys. C 11,
619 (2000)
[31] E. El-dahshan, A. Radi, M.Y. El-Bakry, Int. J. Mod. Phys. C 19, 1787 (2008)
[32] A.E. Eiben, J.E. Smith, Introduction to Evolutionary Algorithms (Sprin-
3199 (2009)
[34] E. El-Dahshan, A. Radi, M. Y. El-Bakry and M. El Mashad, Artificial neural network in heavy ion collision, 6th Nuclear and Particles Phys- ics Conference, Luxor, Egypt,17{21 November (2007).
[35] M. Y. El-Bakry, Chaos, Solitons and Fractals 18, 995 (2003).
[36] M. Wolter, Phys. Part. Nucl. 38, 255 (2007)
[37] T. Malisiewicz, Genetic programing and non-linear regression, 2 De- cember, 2003.
[38] J. C. Werner, High Purity Neutral Pions Selection Using Genetic Pro-
graming Discriminate Function, University of Manchester Internal Re- port for Research Project GridPP-UK/PPARC reference PP/C502006/1 http://www.hep.manchester. ac.uk/u/jamwer/.
[39] S. Sette and L. Boullart, Eng. Appl. Artifcial Intelligence 14, 727 (2001).
IJSER © 2012