International Journal of Scientific & Engineering Research, Volume 2, Issue 1, January-2011 1
ISSN 2229-5518
GPS Based Voice Alert System for the Blind
Rishabh Gulati
Abstract— GPS is employed to find the position of the user on the earth. This information is provided by the GPS with the help of the data it receives from the satellites. GPS based voice alert system for the blind uses the current location and gives the
alert to the blind man if it was his destination area. This paper describes the concept using a microcontroller based system. The
system has a dynamic user interface and is easily operable. The system is realised using a GPS module (SR-92) and a Voice Module (APR9600) interfaced with a PIC16F877 microcontroller. The working of the system incorporates two stages; first the location based audio recording stage and second, the navigation of the blind person using the signal from the GPS receiver. The system employs a user friendly design and provides for an automatic location name announcement system.
Index Terms— Navigation, Audio input-output, User Interfaces, PIC microcontroller.
—————————— • ——————————
1 INTRODUCTION
he Global Positioning System (GPS) is a U.S. space- based radio navigation system that provides reliable positioning, navigation, and timing services to civi-
lian users on a continuous worldwide basis. For anyone with a GPS receiver, the system will provide location and time. GPS provides accurate location and time informa- tion for an unlimited number of people in all weather, day and night, anywhere in the world.
GPS based blind man device with user input interfacing (voice based) intellectually finds the current location and gives the alert to the blind man if it was his destination area.
Microcontroller is the heart of the device. It stores the data of the current location which it receives from the GPS system, so that it can make use of the data stored to compare with the destination location of the user. By this it can trace out the distance from the destination and pro- duce an alarm to alert the user in advance.
This device is designed to provide a voice based an- nouncement for the user, i.e, the user gets the voice which pronounces his destination location as and when he is about to reach the destination. Here instead of an alarm sound the blind man can directly hear the location rec- orded by the user itself.
2 SYSTEM REQUIREMENTS
2.1 Hardware
2.1.1 Voice Module (APR9600)
APR9600 is a low-cost high performance sound record/replay IC incorporating flash analogue storage technique. Recorded sound is retained even after power supply is removed from the module. The replayed sound exhibits high quality with a low noise level. Sampling rate for a 60 second recording period is 4.2 kHz that gives a sound record/replay bandwidth of 20Hz to 2.1 kHz.
However, by changing an oscillation resistor, a sam-
pling rate as high as 8.0 kHz can be achieved. This short- ens the total length of sound recording to 32 seconds. To-
tal sound recording time can be varied from 32 seconds to
60 seconds by changing the value of a single resistor. The IC can operate in one of two modes: serial mode and pa- rallel mode. In serial access mode, sound can be recorded in 256 sections. In parallel access mode, sound can be rec- orded in 2, 4 or 8 sections. The IC can be controlled simp- ly using push button keys. It is also possible to control the IC using external digital circuitry such as micro- controllers and computers.
Figure1: circuit diagram of voice module
2.1.2 GPS Module (SR-92)
The GPS Module SR-92 is a low power and ultra-high performance module which is perfectly suited for this system. It has a 5 pin I/O interface. The module comes with a GPIO control pin for controlling the power. This
IJSER © 2010
2 International Journal of Scientific & Engineering Research, Volume 2, Issue 1, January-2011
ISSN 2229-5518
module has an upgradeable Firmware for future potential performance enhancements.
Specification:
General
Tracking sensitivity – “-159dBm” Chipset - SiRF StarIII
Channels - 20 channel all-in-view tracking
Power
Power input - 3.3V
Power consumption at full tracking - 40mA
Interface
Update time - 1 second
NMEA output protocol - V.3.00
Baud rate - 4800 (default), 9600, 19200, 38400, 57600
Bps (8-N-1)
2.1.3 Microcontroller
The microcontroller used for this system is PIC16F877A. The PIC families of microcontrollers are developed by Microchip Technology Inc. Currently they are some of the most popular microcontrollers, selling over 120 million devices each year. There are basically four families of PIC microcontrollers:
PIC12CXXX 12/14-bit program word
PIC16C5X 12-bit program word
PIC16CXXX and PIC16FXXX 14-bit program word
PIC17CXXX and PIC18CXXX 16-bit program word
2.1.3.1 Features
The CPU uses Harvard architecture with separate Pro- gram and Variable (data) memory interface. This facili- tates instruction fetch and the operation on data/accessing of variables simultaneously. Basically, all PIC microcon- trollers offer the following features:
• RISC instruction set
• On-chip timer with 8-bit prescaler
• Power-on reset
• Watchdog timer
• Power saving SLEEP mode
• Direct, indirect, and relative addressing modes
• External clock interface
• RAM data memory
• EPROM (or OTP) program memory
Some devices offer the following additional features:
• Analogue input channels
• Analogue comparators
• Additional timer circuits
• EEPROM data memory
• Flash EEPROM program memory
• External and timer interrupts
• In-circuit programming
• Internal oscillator
• USART serial interface
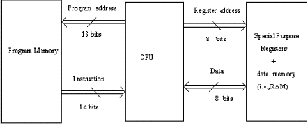
Figure2: architecture of PIC microcontroller
2.1.3.2 Pin Description
PIC16F877 is a 40 pin microcontroller. It has 5 ports port A, port B, port C, port D, port E. All the pins of the ports are for interfacing input output devices.
Port A: It consists of 6 pins from A0 to A5
Port B: It consists of 8 pins from B0 to B7
Port C: It consists of 8 pins from C0 to C7
Port D: It consists of 8 pins from D0 to D7
Port E: It consists of 3 pins from E0 to E2
The rest of the pins are mandatory pins these should not be used to connect input/output devices.
Pin 1 is MCLR (master clear pin) pin also referred as reset pin.
Pin 13, 14 are used for connecting the crystal oscillator to
generate a frequency of about 20MHz.
Figure3: pin diagram for PIC16F877
IJSER © 2010
International Journal of Scientific & Engineering Research, Volume 2, Issue 1, January-2011 3
ISSN 2229-5518
2.1.4 Regulated Power Supply
A device or system that supplies electrical or other types of energy to an output load or group of loads is called a power supply unit or PSU. The term is most commonly applied to electrical energy supplies, less often to mechanical ones, and rarely to others.
A power supply may include a power distribution sys-
tem as well as primary or secondary sources of energy such as
• Conversion of one form of electrical power to another desired form and voltage, typically involving con- verting AC line voltage to a well-regulated lower- voltage DC for electronic devices. Low voltage, low power DC power supply units are commonly inte- grated with the devices they supply, such as computers and household electronics.
• Batteries.
• Chemical fuel cells and other forms of energy sto- rage systems.
• Solar power.
• Generators/alternators.
Figure4: Regulated Power Supply
2.1.5 Micellaneous items
• An LCD display is incorporated for a better user inter- face. Its primary use is to display the latitude and longi- tude of the current location.
• Two different coloured LED’s for indicating the type of data received from the GPS receiver.
• A Speaker, for announcing the message’s, recorded us- ing the voice module.
2.2 Software
2.2.1 Express PCB
This software is used for designing the circuit. Bread- boards are great for prototyping equipment as it allows great flexibility to modify a design when needed; howev- er the final product of a project, ideally should have a neat PCB, few cables, and survive a shake test. Not only is a proper PCB neater but it is also more durable as there are no cables which can yank loose.
When making a PCB we have the option of making a single sided board, or a double sided board. Single sided boards are cheaper to produce and easier to etch, but much harder to design for large projects. If a lot of parts are being used in a small space it may be difficult to make a single sided board without jumpering over traces with a cable. While there’s technically nothing wrong with this, it should be avoided if the signal travelling over the traces
is sensitive (e.g. audio signals).
A double sided board is more expensive to produce professionally, more difficult to etch on a DIY board, but makes the layout of components a lot smaller and easier. It should be noted that if a trace is running on the top layer, check with the components to make sure you can get to its pins with a soldering iron. Large capacitors, re- lays, and similar parts which don’t have axial leads can NOT have traces on top unless boards are plated profes- sionally.
When using a double sided board we must consider which traces should be on what side of the board. Gener- ally, we put power traces on the top of the board, jump- ing only to the bottom if a part cannot be soldered onto the top plane (like a relay), and vice- versa.
2.2.2 PIC Compiler
PIC compiler is a software in which the machine lan- guage code is written and compiled. After compilation, the machine source code is converted into hex code which is to be dumped into the microcontroller for further processing. PIC compiler also supports C language code.
It’s important that we know the C language for micro-
controllers which is commonly known as Embedded C. The PCB, PCM, and PCH are separate compilers. PCB is for 12-bit opcodes, PCM is for 14-bit opcodes, and PCH is for 16-bit opcode PIC microcontrollers. These compilers are specifically designed to meet the unique needs of the PIC microcontroller. When compared to a more tradition- al C compiler, PCB, PCM, and PCH have some limita- tions. One of the limitations being function recursion is not allowed.
This is due to the fact that the PIC has no stack to push
variables onto, and also because of the way the compilers optimize the code. The compilers can efficiently imple- ment normal C constructs, input/output operations, and bit twiddling operations. All normal C data types are supported along with pointers to constant arrays, fixed point decimal, and arrays of bits.
2.2.3 Proteus
Proteus is a software which accepts only hex files. Once the machine code is converted into a hex code, that hex code has to be dumped into the microcontroller and this is done by Proteus. Proteus is a programmer which itself contains a microcontroller in it other than the one which is to be programmed. This microcontroller has a program in it written in such a way that it accepts the hex file from the PIC compiler and dumps this hex file into the micro- controller which is to be programmed.
The program which is to be dumped into the microcon-
troller is edited, compiled and executed. After the suc- cessful compilation of the program, it is dumped into the microcontroller using a dumper.
IJSER © 2010
4 International Journal of Scientific & Engineering Research, Volume 2, Issue 1, January-2011
ISSN 2229-5518
3 VOICE RECORDING AND WORKING PROCEDURE
In this system, the GPS receiver and the control buttons are the input modules to the microcontroller while the Voice module and the LED indicators are the output modules to the microcontroller.
Figure5: system block diagram
The working of the system can be divided into two phases. The first phase would involve recording of the voice in the voice module. For this, we have to switch ON the voice module by connecting the power supply (batte- ries). Then, using a push button and different selection buttons we record the voice. Since we are using eight se- lection buttons in this system we can record eight differ- ent voice messages.
There is a simple process involved in recording these eight messages. For recording a message we need to press the push button, followed by the selection button. While both the buttons are pressed, we hear a beep sound from the speaker, indicating that we can release the push but- ton. While still holding the selection button, we can record a 5sec message. When we finish recording, the selection button is released.
In order to hear what we have recorded, we just need to press and hold the corresponding selection button for
1sec and the recorded message would be replayed.
The second phase deals with receiving the signal from the GPS receiver and actuating the voice module using the microcontroller. To implement this phase, we switch ON the main power supply to the microcontroller. Next, we show the GPS to the open sky for receiving the satel- lite signal. When the satellite signal is receieved by the GPS, the latitude and longitude of the current location is displayed on the LCD. If the data received from the GPS receiver is Active data then the yellow LED will glow, if
the data is Void data then the red LED will glow. Active data means, when the GPS receiver gets the satellite sig- nal it will give the current location values. Void data means if the GPS Receiver is unable to get the satellite signal it will give the previous data which may not be current location value.
After getting the signal, if we want to store the present
location as an alerting location for the blind person, the following procedure will do the needful –
i.Press and hold the control button ii.Press the restart button
iii.Release the restart button after 1sec
iv.Hold the control button until the LCD displays ‘the current location is saved’
Like this we can store 3 different locations by using the control buttons. These values will be stored into the EE- PROM which is a non-volatile memory. We just have to make sure that the distance between the two locations is greater than 100 meters. After storing the location(s), we need to restart the system.
Now when the blind person enters these regions (loca-
tions) with this system the voice module will announce the location names as we had recorded them with respect to the stored locations.
4 RESULT
The “GPS based voice alert system for the blind” is de- signed so as to alert the blind person through voice alerts when he enters into a particular location by announcing the location name. The locations names are pre recorded in the voice circuit and are announced when the person reaches those particular locations.
Figure6: successful program dumping using PICkit 2
IJSER © 2010
International Journal of Scientific & Engineering Research, Volume 2, Issue 1, January-2011 5
ISSN 2229-5518
Presence of every module has been reasoned out and placed carefully, thus contributing to the best working of the system. This system has been successfully designed and tested using the PIC16F877 microcontroller.
5 CONCLUSION
The system designed consists of a GPS receiver and a voice circuit which is interfaced to the microcontroller. The microcontroller is programmed in such a way that depending on the satellite information of location the predefined location name will be announced.
The only major disadvantage of this system is the time
taken by the GPS to receive its initial signal from the sa- tellite, i.e, when it is switched ON. The above disadvan- tage can be removed by using a higher efficiency GPS receiver.
6 FUTURE SCOPE
This project can be extended by incorporating a GSM module. We can interface this module to send messages to the near and dear ones of the Blind person regarding his/her current position. Doing so, we can track the movement of the Blind person in a very efficient manner.
REFERENCES
[1] Punwilai, J. Noji, T. Kitamura, “The design of a voice navigation system for the blind in Negative Feelings Environ- ment”, Communications and Information Technology, ISCIT
2009.
[2] Kaminski, L. Kowalik, R. Lubniewski, Z. Stepnowski, “VOICE MAPS — portable, dedicated GIS for supporting the street navigation and self-dependent movement of the blind ”, Information Technolo- gy (ICIT), 2010.
[3] Helal, A. Moore, S.E. Ramachandran, “Drishti: an integrated navigation system for visually impaired and disabled”, Wearable Computers, 2001.
[4] Marsh, A. May, M. Saarelainen, “Pharos: coupling GSM and GPS-
TALK technologies to provide orientation, navigation and location- based services for the blind”, Information Technology Applica- tions in Biomedicine, 2000.
[5] Raj kamal, Microcontrollers: Architecture, Programming, Interfacing and System Design, Prentice Hall.
[6] PCB Design Tutorial, David.L.Jones, www.alternatezone.com,
http://www.alternatezone.com/electronics/files/PCBDesignTuto rialRevA.pdf
[7] Muhammad Ali Mazidi, Janice Gillispie Mazidi, Rolin D.Mckinlay, the 8051 Microcontroller and Embedded Systems, Prentice Hall.
[8] SR-92 Data-sheet Progin technology Version 1.0 http://www.seee dstudio.com/depot/images/product/ sr-92.pdf
[9] APR9600 Single-Chip Voice Recording & Playback Device 60-
Second Duration user manual http://www.aplusinc.com.tw/data/apr9600_mod3-english.pdf http://www.datasheetcatalog.org/datasheet/aplus/APR9600.pdf
[10] 28/40-Pin 8-Bit CMOS FLASH Microcontrollers http://ww1.microchip.com/do wnloads/en/ device do c/30292c.pdf
IJSER © 2010