International Journal of Scientific & Engineering Research, Volume 3, Issue 6, June-2012 1
ISSN 2229-5518
Fuzzy-Neuro based Navigational Strategy for
Mobile Robot
Shubhasri Kundu, Dayal R. Parhi, B.B.V.L Deepak
Abstract— A new paradigm of intelligent navigation system for mobile robot has been enriched with some common features like: criteria for optimal performance and ways to optimize design, structure and control of robot. W ith the growing need for the deployment of intelligent and highly autonomous systems, it would be beneficial to flawlessly combine robust learning capabilities of artificial neural networks with a high level of knowledge interpretability provided by fuzzy-logic. Fuzzy-neural network is able to build comprehensive knowledge bases considering sensor-rich system with real time constraints by adaptive learning, rule extraction and insertion, and neural/fuzzy reasoning. This technique is simulated and also compared with other simulation studies by previous researcher . The training for back propagation algorithm and its navigational performances analysis has been done in real experimental setup. As experimental result matches well with the simulation result, the realism of method is verified.
Index Terms— Fuzzy, Mobile Robot, Navigation, Neural, Optimized path, Robotic behavior, Training pattern.
—————————— ——————————
1 INTRODUCTION
AVIGATION of mobile robot, which can be defined as the strings of schedules required during goal achieving without any collision with static as well as dynamic ob- stacle, necessitates the abilities of a mobile robot to plan and execute optimized paths within its environment; it may be vague, huge and either partially or absolutely dynamic. De- velopment of new concepts and strategies to tolerate a wide range of uncertainty [5] in the area of mobile robot navigation
has attracted attentions of many researchers.
Fuzzy Logic and Neural networks both have properties for controlling inherent uncertainties and inaccuracies in the sensor data and planning of a strategic action selection me- chanism.
Fuzzy systems are able to treat uncertain and imprecise information, they make, use of knowledge in the form of easily understandable linguistic rules. In a fuzzy inference system, fuzzy logical rules can model the qualitative as- pects of human knowledge and reasoning processes with- out employing precise quantitative analysis [6]. Their drawbacks are caused mainly by the difficulty of designing accurate membership functions and lack of a systematic procedure for the transformation of expert knowledge into the rule base.
On the other hand, neural networks have strong learning abilities though they are weak for expressing rule-based knowledge [10]. Artificial neural network (ANN) systems offer advantages of acquiring knowledge through learning, [6] adaptation, fault-tolerance, parallelism, and generaliza- tion. Neural networks have the ability to learn but with some neural networks, knowledge representation and ex-
————————————————
 Shubhasri Kundu is currently pursuing Ph.D program in robotics in NIT Rour- kela,Odisha, India, PH-9800257472. E-mail: shubhasri.ee2006@gmail.com
Shubhasri Kundu is currently pursuing Ph.D program in robotics in NIT Rour- kela,Odisha, India, PH-9800257472. E-mail: shubhasri.ee2006@gmail.com
 Dayal R.Parhi is a Professor in mechanical engineering in NIT Rourkela, Odisha, India, PH-06612462514. E-mail:dayalparhi@yahoo.com
Dayal R.Parhi is a Professor in mechanical engineering in NIT Rourkela, Odisha, India, PH-06612462514. E-mail:dayalparhi@yahoo.com
 B.B.V.L Deepak is an Asst. Professor in industrial design in NIT Rourkela, Odi- sha, India, PH-06612462581. E-mail:deepak.bbvl@gmail.com
B.B.V.L Deepak is an Asst. Professor in industrial design in NIT Rourkela, Odi- sha, India, PH-06612462581. E-mail:deepak.bbvl@gmail.com
traction are difficult [3].
So the idea is to combine neural networks and fuzzy sys- tems to overcome their disadvantages, but to retain their ad- vantages combining the versatility of neural networks and fuzzy logic replicating aspects of human thought [6]. As the former property reduces the time required to create the model, the latter increases the usefulness of the model [1], Fuzzy neural network (FNN) provides computational intelligence that come with significant learning abilities and inherent transparency (interpretability) to provide strong mechanisms for building intelligent systems that must operate in rapidly changing environments. So, it is able to learn and approximate real-world concepts, building a knowledge base that may be interpreted and modified by the user [2].
This article delivers a narrative attitude for design of a per-
ceptive controller for autonomous mobile robot using multi-
layer feed forward neural network next to FLC, as FLC is not
completely perfect to deal with the increment of variables in
robotic environment. Fuzzy logic has already been used for
behavior design such as obstacle avoidance, wall following
and target seeking. To solve the problem of insufficient know-
ledge, rule-based controller is trained by a back-propagation
learning algorithm that allows autonomous robot to gain more
accurate steering angle than sensory information in a motive
to minimize the error and to maintain a time-optimal and col-
lision-free path in unknown and cluttered environments. Si- mulation and experimental results are presented to demon- strate the validity of the approach.
The framework of this paper is as follows, succeeding the introduction, the fuzzy-neural architecture for navigation of mobile robot is depicted in section 2. The simulation results are discussed and to ascertain viability of the developed tech- nique comparisons have been made with other methods in section 3. In section 4, experimental results are certified with simulation to reveal the supremacy of the recommended me- thodology. Finally, summary has been briefed in the last sec- tion 5.
IJSER © 2012
http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 3, Issue 6, June-2012 2
ISSN 2229-5518
2 ANALYSIS OF FUZZY-NEURO ARCHITECTURE FOR
NAVIGATION
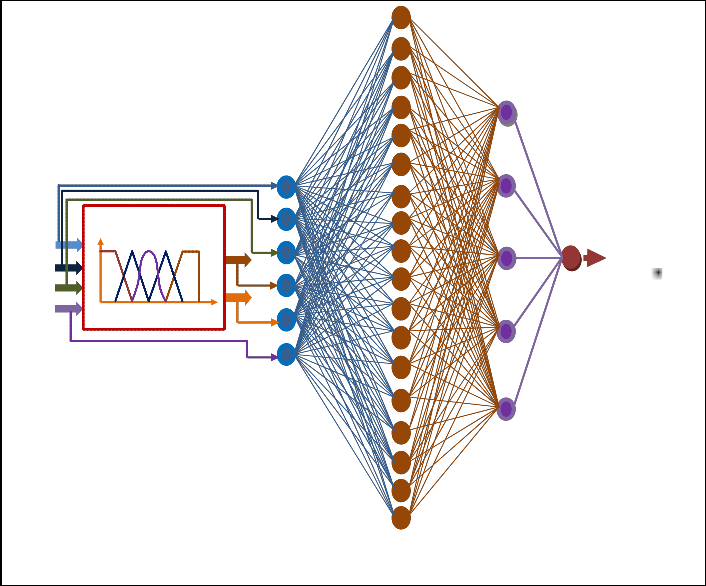
To reduce travel time as well as the distance travelled, four layer perceptron neural network has been designed by using outcomes from the FLC as well as environmental information to make navigational decisions. The first layer is used as input layer which has six neurons; four for receiving the values of the distances from obstacles in front, left and right of the robot and also for the target bearing angle and other Twos are for Left and Right wheel Velocities from FLC. The inputs to the
layer with a single neuron which provide steering angle to control the direction of movement of the robot. Back propaga- tion method is used to minimize the error and optimize the path and time of mobile robot to reach the target [4].
During training and during normal operation, the input pat- terns fed to the neural network comprise the following com- ponents:
{1} = Left obstacle distance from the robot
1
Y {1} = Right obstacle distance from the robot
proposed fuzzy control scheme consist of the distances be- tween a robot and the obstacles to the left, front and right loca- tions and heading angle of robot to the target, acquired by sensors. In this research three types of membership functions (Trapezoidal, Triangular and Gaussian) are hybridized in a single controller for each input and output variables.
{1}
3
{1}
4
{1}
5
Y6
= Front obstacle distance from the robot
= Target bearing angle
= Left Wheel Velocity
2.1 Fuzzy Rule Base Mechanism
Fuzzy rules are formulated based on human perception. The
fuzzy rule base is a set of linguistic rules in the form of ‗if a set
{1}
= Right Wheel Velocity
These input values are distributed to the hidden neurons
which generate outputs given by
of conditions are satisfied, then a set of consequences are in-
Y {lay}
f(V {lay} )
(5)
ferred‘. Based on the above fuzzy subsets, the fuzzy control j j
rules are defined in a general form for four inputs and two outputs fuzzy system as follows [8]:
If (matching degree of LD is μ(LDi) and matching degree of
FD is μ(FDj) and matching degree of RD is μ(RDk) and match-
{lay}
j
Where,
{lay } {lay 1}
ji i
i
(6)
ing degree of HA is μ(HAm), Then (matching degree of LV is μ(LVijkm) and matching degree of RV is μ(RVijkm). (1) where i = 1 to 5, j = 1 to 5, k = 1 to 5 and m =1 to 5 because LD, FD, RD and HA have five membership functions each.
The matching degree of final output is computed by the fol- lowing formula:
Matching degree μ LV, RV (velijkm) = min{μ(LDi), μ(FDj), μ(RDk)
and μ(HAm)} (2)
lay: layer number (2 or 3)
j: label for jth neuron in hidden layer ‗lay‘,
i: label for ith neuron in hidden layer ‗lay-1‘
{lay:}Weight of the connection from neuron i in layer ‗lay-1‘
ji
to neuron j in layer ‗lay‘.
f (.) : Activation function, chosen in this work as the continu- ous log-sigmoid function:
When the matching degree=1 the inferred conclusion is iden-
tical to the rule‘s consequent, and if it is zero no conclusion
f ( x)
1
1 e- x
(7)
can be inferred from the rule.
Finally, the output firing area of the left and right wheel veloc-
ities can be computed by the following formula,
μ LV (vel) = max{μLV(vel1111), …..μ(vel ijkm), …μ(vel 5555)}
μ RV (vel) = max{μRV(vel1111), …..μ(vel ijkm), …μ(vel 5555)} (3) The final output (crisp value) of the fuzzy logic controller of
left and right wheel velocities can be calculated by ―Centre of
Gravity‖ method [9],
Where, β is a slope parameter.
The sigmoid has the property of being similar to the step
function, but with the addition of a region of uncertainty.
Sigmoid functions in this respect are very similar to input-
output relationships of biological neurons, although not exact-
ly the same.
During training, the network output θactual may differ the de- sired output θdesired as specified in the training pattern pre-
LeftVelocity LV
vel
LV (vel)
d (vel)
sented to the network. A measure of the performance of the
network is the instantaneous sum-squared difference between
LV (vel)
d (vel)

θdesired and θactual for the set of presented training patterns:
RightVelocity RV
vel
RV (vel)
d (vel)
(4)
Err ( desired actual )2
all traning pattrns
(8)
RV (vel)
d (vel)
The error back propagation method is employed to train the
2.2 Neural Architecture for Navigation
The network consists of two hidden layers (shown in Fig. 1)

network. This method requires the computation of local error gradients in order to determine appropriate weight corrections to reduce Err. For the output layer, the error gradient is
which adjusted the weight of neuron; as with one hidden layer
{4}
f'(V {4} )(
desired actual )2
(9)
it is difficult to train the network within a specified error limit.
The training error is the difference between desired output
and actual output. The first hidden layer has eighteen neurons

The local gradient for neurons in hidden layer {lay} is given by:
{lay} '
{lay}
{lay
1} {lay 1}
and the second hidden layer has five neurons. These numbers j
of hidden layers were also found empirically. Then an output
f (V1 )( k
k
Wkj
)
(10)
IJSER © 2012
http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 3, Issue 6, June-2012 3
ISSN 2229-5518
L.D F.D
R.D
H.A
Hybrid FLC
1
0
L.V R.V
Output layer
Estimated Steering Angle ( )
Input layer
Second hidden layer
First hidden layer
Fig. 1. Hybrid Fuzzy & Multilayer Neural Controller for Coordination of Robotic Behaviors.

The synaptic weights are updated according to the following expressions:
wall following and target seeking) are required to train and to design an intelligent controller for mobile robot being used to
Wji
(t 1)
Wji
(t)
Wji
(t 1)
(11)
navigate in a cluttered environment.
And W
(t 1)
W (t)
{lay } y {lay 1} (12)
The numbers of neurons are found based on the number of
ji ji j i

Where, α = momentum coefficient (chosen empirically as 0.2 in this work)
= learning rate (chosen empirically as 0.35 in this work)
t = iteration number, each iteration consisting of the presenta- tion of a training pattern and correction of the weights.

The final output from the neural network is:
{4}
training patterns and the convergence of error during training to a minimum threshold error to control the direction of movement of the robot. The neural network is empirically trained to navigate by 200 training patterns representing typi- cal scenarios, some of which are depicted in Table 1. For ex- ample, in training pattern no. (vii) a robot is surrounded by
actual
Where,
f(V1
)
{4} {4} {3}
(14)
left, front and right obstacles at distances of 21c.m, 15c.m and
19c.m respectively. Ultrasonic sensor is giving the reading of
V1 W 1i yi
(15)
430 for the current position of robot; i.e. target is located at an
It should be noted learni ing can take place continuously even during normal target seeking behavior. This enables the con-
troller to adopt the changes in the robot‘s path while moving
towards target. Mainly three behaviors (obstacle avoidance,
angle of 430 at the right side of robot. Output of FLC for this situation as left and right wheel velocities are 5.8c.m/s and
5.1c.m/s respectively based on sensor data. In this scenario, neural network is trained to steer robot towards its right with
IJSER © 2012
http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 3, Issue 6, June-2012 4
ISSN 2229-5518
TABLE 1
SOME OF THE TRAINING PATTERN OF FUZZY-NEURAL CONTROL-
LER
resolves that fuzzy-neuro controller can find the definite goal using minimum path length than path traced by Ma et al. [7] in Fig. 2. So the comparison of performances has shown a good agreement and also verifies the ability and flexibility of the present approach.
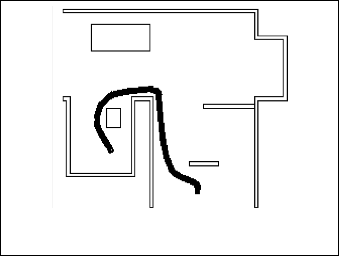
It has been perceived that the robot controlled through fuzzy- neural control has improved performance than the fuzzy con- troller in terms of positioning accuracy and collision avoid- ance and it provides optimize path to reach the goal.
(a)
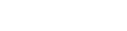
Fig. 2(a). Mobile robot reference trajectories by Ma et al. [7]
an angle of 260 with respect to goal position to maintain the shorter trajectory.
3 SIMULATION RESULTS
The series of simulations test have been conducted to exhibit that the anticipated method can partially fulfill the most of the fundamental as well as critical robotic behaviors during navi- gation in complex and uncertain environments. All simulation environments are generated artificially containing one mova- ble robot and static obstacles as well as only one static target.
To justify the worth and robustness of Fuzzy-Neuro control algorithm, simulation result (Fig. 2(b))on mobile robot naviga- tion has been compared with previous research work (Fig. 2 (a)) where a new FNN is applied to a simulation mobile robot of three DOF by Ma et al. [7]. Comparison is illustrating de- gree of restricted optimization ability of the controller which
Fig. 2(b). Simulation result by developed fuzzy neural controller
4 EXPERIMENTAL RESULT
The experimental work has been made by loading the Fuzzy-Neuro algorithm into the developed mobile robot through software and hardware interface. After learning and training, Fuzzy-Neuro algorithm is able to provide Left wheel and Right wheel velocities and optimized steering angle which are sufficient to avoid obstacles and achieve target in real world environment. The assumptions about the mechani-
IJSER © 2012
http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 3, Issue 6, June-2012 5
ISSN 2229-5518
cal structure and motion of a mobile robot, to which the pro- posed method is applied, are as follows:
(1) Mobile robot moves on a plane surface.
(2) The wheel of a mobile robot rolls on the floor without
translational slip.
(3) The wheel of a mobile robot makes rotational slip at the
contact point between each wheel and the floor.
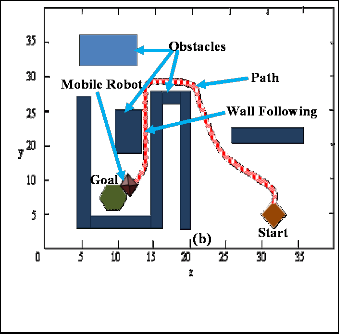
During experiment, paths traced by the robot are marked
on the floor by a pen (fixed to the front of the robots) as they
move in Fig. 3. The experimentally acquired paths closely fol-
low the paths sketched by the robots during simulation for
analogous arrangement of obstacles, start and goal point. It
has been acquired that the experimental path lengths and time taken are more than the simulation path lengths and time tak- en. This is due to presence of various errors (e.g. signal trans- mission error in data-cable, obstacle or target tracking error, presence of friction in rotating elements, slippage between floor and wheels, friction between supported point and floor
etc.).
The path lengths are taken in average from 9 different experi-
ments which have been performed in environmental scenario as shown in Fig. 3. Elementary as well as significant robotic behaviors have been addressed in both simulation and expe-
rimental modes employing fuzzy-neural approach.
It has been found that the results obtained from experimental
setup are more close to results obtained from simulation mode
(shown in Fig. 2(b)) which validate the proposed method.
FLC along with Neural network affords much more rapid re-
sponse in an unidentified environment and has less computa- tional effort than other conventional approaches.
TABLE 2
UNITS FOR MAGENTIC PROPERTIES
Path Length in simulation by proposed algorithm (in pixel) | Path Length in Experimental mode by proposed algorithm (in pixel) | Path Length in simulation of Previous Research work by Ma et al.[7] (in pixel) | % of error between simulation and experimental results by proposed technique |
193 | 221 | 197 | 12.669% |
vestigations, some precious features of Fuzzy-Neuro algo- rithm in mobile robot navigation can be briefed here:
1. It has been seen that, by using the Hybrid Fuzzy- Neuro controller the robots are able to avoid any ob- stacles, escape from dead ends, and find target in complex hazardous environments.
2. Various navigational control strategies (e.g. obstacle avoidance, wall and edge following and target seek- ing) have been addressed in simulation and experi- mental environments using developed controller.
3. Training patterns of Back-Propagation Algorithm based neural network can be generated by simulation rather than by experiment, saving considerable time and effort.
4. Comparison of developed algorithm (Table 2) with
simulation result by Ma et al. [7] employing FNN
Goal
Start
Goal
Start
Path
Start
Path
Goal
technique (Fig. 2(a)) both in simulation (Fig. 2(b)) and experimental (Fig. 3) environment delivers a good performance measure concerning veracity of the me- thod.
This hybrid approach has been trialed for achieving a resolu- tion of reducing inaccuracy in steering angle and optimization
Path
(a) (b) Start
Start
(c)
Start
with respect to path length and time in both simulation and
experimental mode. This issue has partially been solved here.
REFERENCES
Path
(d)
Goal
(e)
Fig. 3. Experimental Results Using Fuzzy-Neuro Controller in compar- ison with simulation result (Fig. 2(a)) by Ma et al. [7]
6 CONCLUSIONS
On the basis of hypothetical, simulation and experimental in-
Neurocomputing, 28, 1999, 127-143.
[4] Haykin S., ―Neural Networks a Comprehensive Foundation‖, Second
Ed., (India: Pearson prentice hall), 2006.
[5] Jin Yaochu and Jiang Jinping, ―Techniques in Neural-network-based Fuzzy System Identification and Their Application to control of complex systems‖, Fuzzy Theory Systems Techniques and Applica- tions, 1 (1999) 112-128.
[6] Jolly K.G., Kumar R. Sreerama and Vijayakumar R., ―Intelligent task
IJSER © 2012
http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 3, Issue 6, June-2012 6
ISSN 2229-5518
planning and action selection of a mobile robot in a multi-agent sys- tem through a fuzzy neural network approach‖, Engineering Appl i- cations of Artificial Intelligence 23 (2010) 923–933.
[7] Ma Xiaowei, Li Xiaoli and Qiao Hong, ―Fuzzy neural network –based real-time self-reaction of mobile robot in unknown environments‖, Mechatronics, 2001, Vol.11, pp.1039-1052.
[8] Parhi Dayal R., ―Navigation of Mobile Robots Using a Fuzzy Logic
Controller‖, Journal of Intelligent and Robotic Systems, Volume 42,
Number 3 / March, 2005.
[9] Parhi D R and Singh M K, ―Intelligent fuzzy interface technique for the control of an autonomous mobile robot‖, Proceedings of the Insti- tution of Mechanical Engineers, Part C: Journal of Mechanical Engi- neering Science, Volume 222, Number 11 / 2008.
[10] Matijevics I., ―Infrared Sensors Microcontroller Interface System for
Mobile Robots‖, 5th International Symposium on Intelligent Syste ms and Informatics, Subotica, Serbia, 24-25 August, 2007.
IJSER © 2012
http://www.ijser.org