International Journal of Scientific & Engineering Research, Volume 5, Issue 5, May-2014
ISSN 2229-5518
29
Design and Implementation of an Effective
Electrical Power System for Nano-Satellite
Mohammed Chessab Mahdi, Jaafer Sadiq Jaafer, Dr. Abd- AL-Razak Shehab
Abstract—Design of electrical power system for Nano-satellites is presented. The role of this electrical power system is to provide electrical power for all the subsystems of KufaSat .This was achieved by the use of solar cells when the satellite is in direct sunlight and by two Lithium Polymer batteries when the Sun is eclipsed .The batteries are charged by the solar panels through three battery charge regulators which optimize the solar arrays’ voltages independently for maximum power transfer. Power is then transferred to s ubsystems through a number of power buses, 3.3V, 5V and unregulated.
Index Terms: CubeSat, Electrical Power System (EPS), KufaSat, Nano-satellite
—————————— ——————————
1 INTRODUCTION
Nano-satellites are gaining an ever increasing interest in the academic and industrial space communities, because they provide relatively fast and low cost access to space and can be used as low cost technology demonstrators for advanced space engineering concepts. The major difficulties with a Nano satellite design are the volume, mass, and power limitations.
CubeSats operate on a strict power budget because of the power requirements and limitations in that they have relatively limited energy sources (small area available for solar arrays, limited mass and volume to accommodate batteries).
The main task of the electrical power system (EPS) is to provide the other subsystems with a reliable and continuous power source. The main components of this system are solar array, batteries and regulators which lead to conversion from solar energy to electrical power, energy storage in batteries, regulation of the electrical power, distribution the power to other subsystem.
The EPS must not only be efficient but flexible. The ideal
EPS design is one that meets the power requirements of a specific mission, and can then be used multiple times in different missions, without having to be redesigned for each mission [1].
A quick review to the literature of various EPS designs of
existing 20 (1U) cubesats through website of each cubesat to know some important parameters of these systems like power system implementation approaches , number of voltage buses and the voltage rail values.
The most common power system implementation
approaches found on today’s cubesats are Direct Energy Transfer (DET) and Maximum Power Point Tracker (MPPT). From 20 (1U) existing cubesats websites we get that:
Eight cubesats ( CUTE-I Tokyo Institute of Technology ,XI- IV and XI-V University of Tokyo , SEEDS 1 Nihon University, Hermes Colorado Space Grant Consortium,
AtmoCube University of Trieste, Goliat University of Bucharest, OuFTI-1 University of Liege) are Direct Energy Transfer (DET) power system implementation approach. Eight cubesats (AAU Alborg University, MEROPE Montana State University,CP1, CP2 and CP3,Cal Poly, Compass One Fachhochschule Aachen, KySat Consortium of Kentucky Universities, e-st@r Politecnico di Torino) are Maximum Power Point Tracker (MPPT) approach.
Four cubesats (DTUsat University of Denmark, Sacred
University of Arizona, KUTEsat University of Kansas, and
HAUSAT Hankuk Aviatin University) are unknown approach.
Three cubesats have one voltage bus and two have two
buses ,eight has three buses ,three have four buses , one has five buses ,two have six buses , one have seven buses.
The most common regulated outputs voltage buses are 3.3V and 5.0V, there are ten cubesats have 3.3V bus and fifteen cubesats have 5V bus.
Kufasat is the first Iraqi student satellite project at University of Kufa and has mission to imaging purposes. In accordance with CubeSat specifications, it is 1U Nano- satellite with three voltages buses EPS and has a mass of max 1kg, and its size is restricted to a cube measuring
10×10×10 cm3. It also contains 1.5 m long gravity gradient boom, which will be used for passive attitude stabilization.
2 ELECTRIC POWER SYSTEM (EPS)
The electrical power system generates, stores, conditions, controls, and distributes power within the specified voltage band to all bus and payload equipment [2]. The EPS is considered as an essential part of the satellite, because no power will mean an end to the mission. So it is important to have a stable and reliable power system. The required size of the solar panels and batteries depends on the requirements for the payload(s) and the lifetime of the mission [3].
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 5, May-2014
ISSN 2229-5518
30
The EPS provides direct current (DC) power for all the subsystems onboard the KufaSat by the use of solar panels when the satellite is in direct sunlight and by two Lithium Polymer batteries when the Sun is eclipsed.
The batteries are charged by the solar panels through three high efficiency solar battery charger with embedded maximum power transfer( MPPT) which build-in an input source reverse polarity protection which prevents damaging in case of reverse connection of solar panel at the input.. Power is then transferred from the battery or directly from the solar panels through a number of power buses, rated at
5V, 3.3V and unregulated, to which the other subsystems are
attached. These regulated buses have over-temperature and over-current protection, to prevent damage from any short circuit, and the battery has under-voltage protection to prevent a complete discharge.
3 DESIGN OF EPS
The power system design process starts with analyzing the orbit parameters, the load power requirement, and heritage data on similar satellites built and flown earlier.[2] The three basic satellite parameters affecting the EPS design are the orbit inclination, orbit altitude, and the mission duration. These three parameters are used to determine the sunlight and eclipse durations, orbit period, and the solar angle (β) between the orbit plane and the Earth–Sun line.
The electrical power system requirements are derived from
the spacecraft level requirements and in-house trade studies.
The EPS self-derived requirements are based on various analyses performed on the power system under design. The final requirements generally come from the operational orbit analyses.
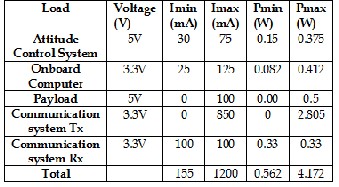
The orbit parameters and the load power requirement for
KufaSat project are listed in table 1 and table 2 respectively
TABLE I
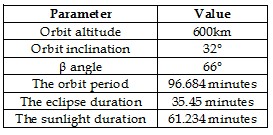
THE ORBIT PARAMETERS
TABLE 2
THE LOAD POWER REQUIREMENT
Labcenter's Proteus was used to design the electric power system of KufaSat. Proteus is software for microprocessor simulation, schematic capture, and printed circuit board (PCB) design.
4 EPS ARCHITECTURE
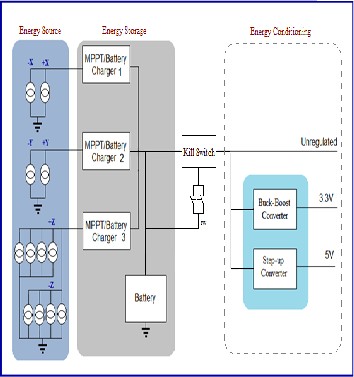
The basic components of the EPS are the energy source, energy conversion, power regulation and control, energy storage, and distribution [1]. Fig 1 shows a simple block diagram of these components.
Fig 1. Block diagram of EPS
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 5, May-2014
ISSN 2229-5518
31
The EPS developed in KufaSat uses a Maximum Power Point Tracker (MPPT) system with a battery bus. The team determined this to be the most versatile and efficient topology, and is ideal for nano satellite. The MPPT topology is implemented using a dedicated MPPT for each opposing solar panel pair which allow using different solar cell technologies on each panel.
5 EPS COMPONENTS
5.1 Energy Source (Solar panel):
Azur Space TJ Solar Cell 3G30C - Advanced and Spectrolab UTJ TASC will be used as a hybrid design for the flight model of KufaSat.
The Azur Space TJ Solar Cell will be used on all four side
faces which do not contain any components or devices. Each
cell has an efficiency of 29.5%, with an output of 2.4 V and
504 mA when maximum power point is achieved. Each
panel of these side faces of the CubeSat will have two solar cells (4x8 cm) connected in series to form large panel.
The Spectrolab UTJ TASC cells will be used on the top and
bottom faces because they are smaller, and can therefore be more easily fit around components and devices. Each cell has an efficiency of 27%, with an output of 2.19V and 28 mA when maximum power point is achieved. Each two solar cells arranged within a rectangular area of 1.55 x 3.18 cm and connected in series to form small panel. Four small panels will be mounted on each of top and bottom sides.
All large panels in opposite sides will be connected in parallel to form two groups (+X,-X) group and (+Y,-Y) group. All eight small panels in top and bottom sides will be connected in parallel to form (+Z,-Z) group. Fig 2 illustrates the connection of all solar cells. This configuration will allow for power to be produced on every face, and will also allow for the satellite to maximize the power produced with the exterior surface area.
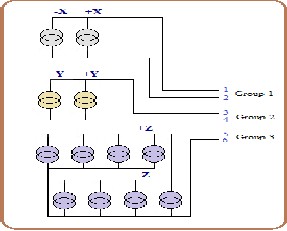
Fig 2. Solar cells connection
Fig 3 shows the current placement of all solar cells on the outer surfaces of the satellite in addition to payload, communication antenna, end of boom, GPS antenna and sun sensor.
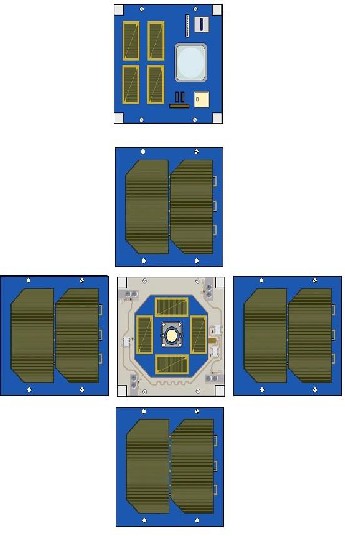
Fig 3. Outer surfaces of the satellite
5.2 Energy Storage:
5.2.1 Maximum Power Point Tracker (MPPT) and
Battery Charger:
Maximum Power Point Tracker (MPPT) is an electronic DC to DC converter that optimizes the match between the solar panels and the battery/ DC-Bus. Maximum power point tracker is located between the solar arrays and the battery pack .Its input connects to the solar cells and its output connects to batteries. MPPT manipulate either operating voltage or current of the solar array. It manipulates the operating point of the solar array by controlling the operation of the switching converter between the solar array and the load [1].
The SPV1040 is a high efficiency solar battery charger with
embedded MPPT from ST Microelectronics. It is low
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 5, May-2014
ISSN 2229-5518
32
voltage, self-powered DC/DC converter that operates over
0.3 V to 5.5 V DC input voltage range and provides a single
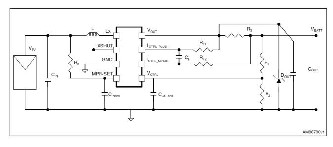
regulated output voltage and current by sensing the VCTRL feedback of the external resistor divider and the voltage drop on the external sense resistor Rs respectively [4]. Also it owns over-current and over-temperature protection which disconnects the charger from its output terminal until it reaches an acceptable level. The SPV1040 will be used in EPS of KufaSat as MPPT and battery charger in the same time. Fig 4 explains the application circuit of SPV1040.
Fig 4. SPV1040 application circuit [5]
5.2.2 Battery:
The solar cells provide power to the DC-bus during daylight, but during solar eclipse the solar cells cannot provide power and therefore we need to have batteries. The batteries also provide power during peak situations like communication with the ground station.
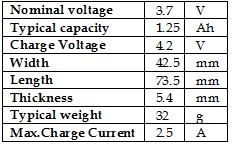
Two batteries type Kokam SLPB 554374H was selected for
Kufasat. It is a Lithium Polymer Battery and was chosen for
its good specifications which listed in table 3.
TABLE3
KOKAM SLPB 554374H SPECIFICATIONS [6]
The procured battery which will be used for the Engineering
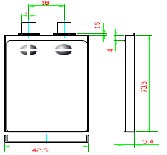
Model of the CubeSat is shown in Fig 5.
Fig 5. Kokam SLPB 554374H
5.2.3 Kill Switch:
Kill switch is required by CubeSat standard. It should be placed between the battery connector and the regulation circuitry to stops the batteries from providing power to the satellite during launch. The TPS2557 with auto-retry functionality is implemented as kill switch in the satellite because a MOSFET is considered to be more reliable. Kill switch are implemented as two switches in parallel. In the case of one of two switches is malfunctioning, the other switch will complete the work.
TPS2557 device limits the output current to a safe level by
switching into a constant-current mode when the output
load exceeds the current-limit threshold. The FAULT logic output asserts low during overcurrent and over temperature conditions [7].
5.3 Energy Conditioning
TPS63001 and MAX8815A are used to provide 3.3V and 5V respectively. The TPS63001 is a buck-boost converter which operates over 1.8V to 5.5V DC input voltage range and provides 3.3V fixed output voltage [8]. The MAX8815A is a high-efficiency DC-DC synchronous step-up converter, low quiescent current, with true shutdown and inrush-current limiting [9].It operate over 1.2V to 5.5V DC input voltage range and provides 5V fixed output voltage .
6 POWER BUDGET
The power budget is based on the power requirements for each subsystem, power generated in solar cells and power stored in batteries. If the power generated during one orbit is larger than or equal the power consumed during this orbit then we have a positive power budget. If not we will have a negative power budget, in this case the battery will be gradually drained until it is empty.
6.1 Power Generation
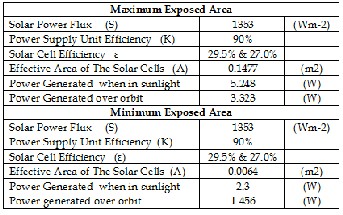
The amount of generated power available depends on solar power flux, efficiency of the solar cell [10] in addition to power supply unit efficiency, and effective area of the solar cells and can calculated using equation 1
P = SKεA (1)
Where S is the solar power flux, K is efficiency of the power
supply unit, ε is solar cell efficiency and A is effective area of
the solar cells.
The generated power calculated with considering the following points:
The solar power flux (S) in the earth's vicinity varies between Smax = 1399W/m2 in early January and Smin =
1309W/m2 in mid-summer. An average value of S =
1353W/m2 is often assumed for design purposes. [10]
The power supply system consists of components that
dissipate energy such as the battery charger and power bus
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 5, May-2014
ISSN 2229-5518
33
regulators which lead to reduce the efficiency of power supply unit. The calculated efficiency of the power supply unit is 90%.
Two types of solar cells used in KufaSat EPS , Azur Space TJ
Solar Cell 3G30C - Advanced with efficiency 29.5% and Spectrolab’s Triangular Advanced Solar Cells (TASC) with efficiency 27.0%.
The effective area of the solar panels is the total area of the solar panels exposed to the Sun. The area is minimum when axis of rotation of the satellite is pointing always to the Sun, thus, only one side of the satellite is exposed. The area is maximum when the corner between 3 faces points towards the Sun In this case the effective area is equal to the area of three faces. Table 4 explains the power generated in two cases.
7 SCHEMATIC AND PCB LAYOUT
The complete schematics of the engineering model of the EPS card are shown in fig 6. All work with the PCB was done on the computer using Proteus Design Suite V8. The prototype was a two-layer PCB within the physical size of
89x95 mm with 1.25 mm board thickness and 50µm feature
thickness.
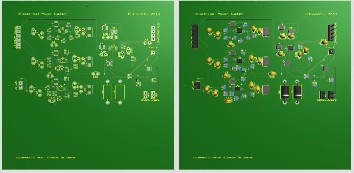
Fig 7 explain artwork PCB layout, (A) Top Copper, (B)
Bottom Copper, (C) Two Layer, (D) Top Silk. Fig 8 is 3D
view (A) Without components, (B) With Components,(C) Side view.
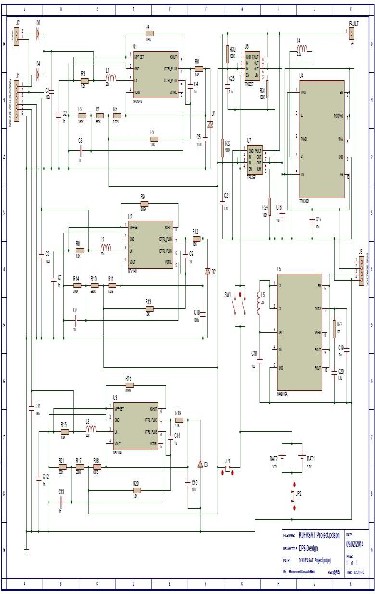
TABLE 4
MAXIMUM AND MINIMUM POWER GENERATED
6.2 Power Storage
From the specification of Kokam battery which listed in table 3 the power storage can be calculated using multiply the nominal voltage by typical capacity for two batteries. Power storage = 3.7x (1.25x2) = 9.25 W/h
6.3 Power consumed
Table5 explain the maximum power consumed by each subsystem of KufaSat.
TABLE 5
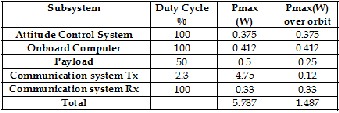
MAXIMUM POWER CONSUMPTION BY EACH SUBSYSTEM
Fig 6. EPS Complete Schematic Diagram
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 5, May-2014
ISSN 2229-5518
34
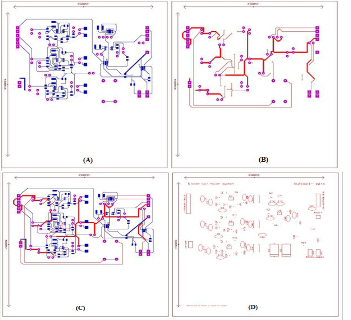
Fig 7. A-Top, B-Bottom, C-Two Layer, D- Top Silk

(A) Without components (B) With Components
(C) Side view
Fig 8. 3D view A- Without components, B- With Components, C- Side view
8 CONCLUSION
The main task of the EPS module are to efficiently condition the available power from the solar cells, to safely charge the batteries, and to provide two regulated 3.3V and 5V power rails. The power subsystem design described in this paper is
based on the SPV1040 charger. It is a compact and simple charging system. In spite of the variation of several conditions over the orbit like temperature and irradiation the SPV1040 allows to achieve the maximum efficiency in terms of power harvested from the cells and transferred to the output thanks to the embedded MPPT algorithm.
Tables 4&5 show that the minimum power produced over
orbit by solar cells is approximately equal to the maximum power consumed over orbit in the subsystems. This makes the power stored in the batteries a reserve power and can compensate for what consumed from it easily during periods in which the power produced is greater than the minimum value. As a result, EPS becomes more reliable and can withstand potential changes in the process of energy consumption.
REFERENCES
[1] Robert Burt,” Distributed Electrical Power System in Cubesat
Applications,” M.S. thesis, Utah State University, 2011.
[2] Mukund R. Patel, “Spacecraft power systems,” CRC Press 2005 ISBN 0-
8493-2786-5 .
[3] Lars Erik Jacobsen,” Electrical Power System of the NTNU Test Satellite,”
M.S. thesis, Norwegian University of Science and Technology, 2012.
[4] SPV1040 High efficiency solar battery charger with embedded MPPT. ST Microelectronics Doc ID 18080 Rev 2, 2011. [Online]. Available: http://data.datasheetlib.com/pdf1/61/68/616887/spv1040ttr_c5c3a74a
51.pdf?take=binary
[5] AN3319 Application note - STEVAL-ISV006V2: solar battery charger using the SPV1040 ST Microelectronics, DocID18265 Rev 8, 2013. [Online]. Available: http://www.st.com/st-web- ui/static/active/en/resource/technical/document/application_note/C D00292052.pdf
[6] Cell Specification Data, SLPB 554374H, Kokam Co., Ltd. [Online].
Available:
http://www.kokam.com/product/product_pdf/rc_070226/SLPB5543
74H_1250mAh_Grade.pdf
[7] TPS2556, TPS2557 Precision adjustable current-limited power-distribution switches, Texas Instruments, 2009. [Online]. Available: http://www.digchip.com/datasheets/download_datasheet.php?id=11
49330&part-number=TPS2557
[8] TPS63000, TPS63001, TPS63002. High efficient single inductor buck-boost converter with 1.8-A switches, Texas Instruments, 2010. [Online]. Available: http://pdf1.alldatasheet.net/datasheet
pdf/view/465785/TI1/TPS63000/+3WWJ9JVRh7auSUzYBtN+/datash
eet.pdf
[9] MAX8815A, 1A, 97% Efficiency, 30μA Quiescent Current Step-Up Converter with True Shutdown, Maxim Integrated Products, 2008. [Online]. Available: http://datasheets.maximintegrated.com/en/ds/MAX8815A.pdf
[10] Peter Berlin,” Satellite Platform Design,” Department of Space Science,
University of Lulea, Kiruna Sweden, fifth edition, 2007.
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 5, May-2014
ISSN 2229-5518
35

Mohammed Chessab Mahdi had his B.Sc. degree in control and system engineering from University of Technology –Baghdad at 1984 and had his M.Sc. degree in space technology from University of Kufa at 2013. He is full time lecture in Technical Institute of Kufa -
Foundation of Technical Education– Iraq and member of KufaSat
team - space research unit-Faculty of Engineering University of Kufa. He has good skills in the design and modeling of attitude determination and control systems using Matlab program. He has been published more than 5 researches.

Jaafer Sadiq Jaafer received his B.Sc. in Electrical Engineering at 1983 from the Department of Electrical Engineering - University of Technology- Baghdad. Currently he works as a lecturer in Technical Institute of kufa-Foundation of Technical Education- Iraq.

Dr. Abd AL-Razak Shehab body of receive his B.Sc. from Baghdad University at 1987 , M.Sc. and Ph.D. from Saint Petersburg polytechnic government university (Russia federal) at 2000 and 2004 respectively .Currently he is full time lecture in electrical engineering department (Head of department since 2007) – Faculty of
Engineering –Kufa University–Iraqi ministry of high education and scientific research. He has good skills in the design and modeling of control systems and switched reluctance motor
(SRM). He has been published more than 8 researches.
IJSER © 2014 http://www.ijser.org