International Journal of Scientific & Engineering Research, Volume 5, Issue 9, September-2014 286
ISSN 2229-5518
Deployment Model of an Underwater Sensor Network in a Swimming Pool Environment with a suitable Localization Scheme
M.Caroline Joyce1, K. Vanitha2
Abstract— Swimming Pool is one of the places where most of the children wish to be. But mostly the swimming pools do not have proper security measures to be done, in case of any emergency. In the world, in totality the reason for death of children is due to drowning while swimming in the pools. To overcome such mortality due to drowning, a new system has been devised to prevent such occurrences using mobile underwater sensors. The system is designed for children who weigh below 10 kilograms. In a specified swimming pool, a number of mobile underwater sensors are deployed. For every child a mobile sensor node is allocated and it is designed to move along with the child. The mobile sensor which is moving along with the child monitors the movement of the child. Researchers have identified the time a normal child can hold its breath is 35 seconds. If a child lies below the water surface for more than 35 seconds, the sensor identifies the child as
drowning. So in the starting of the 30th second the sensor passes the message to an alarm and the alarm is activated. The alarm will ring
with 100 decibel sound. Here in this real time deployment, PSO algorithm is used to localize the mobile sensor nodes in the swimming pool environment. Thus the proposed work would help saving a child from drowning in a swimming pool.
Index Terms — Underwater Sensor Networks, USN Applications, Localization, PSO Algorithm, Acoustic Signals. Swimming Pool Safety
—————————— ——————————
1 INTRODUCTION
All the people irrespective of the age wish to be in and around the water and children are no exception to that. Naturally children like to spend time in swimming pools whether or not they know to swim. But sometimes the pools where the chil- dren wished to be would turn to a place where they shouldn’t have been. According to National Drowning Report 2013 tak- en by Royal Life Saving Society- Australia, 56% of the total deaths of children in Australia for the year 2012-2013 aged between 0-14 years is on account of drowning in the swim- ming pool. Proper Security measures should be taken for the children in the swimming pool. The proposed work aims to provide a security measure for the drowning children using Mobile Underwater Sensor Networks.
1.1 Underwater Sensor Networks:
Underwater Sensor Networks are devised for stand-alone applications and to control Autonomous Underwater Vehicles (AUVs) and as an addition to cabled system. [1] A basic un- derwater acoustic network is formed by establishing a two way acoustic links between various instruments such as Sen- sors and Underwater vehicles deployed in the ocean. This network is then connected to a Base Station. This type of con- figuration creates an interactive environment where the scien- tists can access the real time data gathered from the sensors and vehicles. Loss of data can be avoided to the maximum level since the gathered data are transferred to the base station when it is available.
Underwater Sensors are mainly deployed in the Oceanic environment for the applications of Pollution monitoring, Dis- aster prevention, environmental monitoring, tactical surveil- lance, assisted navigations and so on. Exploring natural under sea resources and gathering scientific data in the monitoring
missions can be done with the help of Multiple Unmanned or Autonomous Underwater vehicles (UUVs, AUVs) deployed with single or multiple sensors. To achieve this, communica- tion has to be established among the sensors below water.[2] The underwater sensor nodes and the vehicles have to possess the capability of self configuring itself and it has to communi- cate among themselves and to the base station.
1.2 Various Applications of Underwater Sensor Net- works:
Here are the various Applications of Underwater Sensor Net- works.
• Habitat tracking: Underwater Acoustic sensors are
used in the field of tracking the habitat. UW-ASN can be used to track ocean currents and winds, to improve weather forecast, to detect climatic changes, to under- stand and predict the effect of human activities on ma- rine ecosystems, and also in biological supervising such as tracking of different kinds of fishes and microorgan- isms. These sensors are also used in the field of Pollu- tion tracking such as Chemical, Biological and Nucle- ar.[3]
• Vigilance: Fixed underwater sensors and autonomous
underwater vehicles can be deployed to collaboratively monitor areas for vigilance, reconnaissance, targeting and intrusion detection systems.[4]
• Underwater Sampling: Networks of Sensors and AUVs
can perform synoptic, cooperative and adaptive sam- pling of the 3D coastal ocean environment.[5]
• Navigation Aid: Sensors deployed in the oceanic envi-
ronment helps in identifying hazards on the seabed, lo- cate rocks or shoals in shallow water and submerged wrecks in the ocean.
IJSER © 2014 http://www.ijser.org
The research paper published by IJSER journal is about Deployment Model of an Underwater Sensor Network in a Swimming Pool Environment with a suitable Localization Scheme, published in IJSER Volume 5, Issue 7, July 2014 Edition. 287
ISSN 2229-5518
• Exploring Deepsea: Underwater Sensor Netorks de- ployed in the ocean can be used in detecting oilfields or reservoirs, determine routes to lay undersea cables and to assist in exploration for valuable minerals.
• Detecting Mine: Multiple AUVs with acoustic and opti-
cal sensors deployed in the deep ocean can be used to perform rapid environmental assessment and helps in detecting mine like objects.
• Prevention of Calamity: Underwater sensor nodes de- ployed in the ocean can measure seismic activity and can provide tsunami warnings to coastal areas and it can study the effects of submarine earthquakes.[6]
1.3 Need for Underwater Sensor in a Swimming Pool:
As per the survey conducted by the above said research organisation in Australia, major death of the children are caused by drowning in the swimming pool. Some set of se- curity measures has to be taken to prevent the happening of such tragic incidents in future. [7] The major challenge faced by the children in the swimming pool is that unlike adults they can’t hold their breath for longer time. Underwater Sensors can be used in such cases to prevent the children from drowning in pools. Mobile Sensors placed underwater, tracks the motion of the children and raises an alarm in case of any emergency.
2. A STUDY ON THE CHARACTERISTICS AND APPLICATIONS OF UNDERWATER SENSOR NETWORKS- PHASE I
In Phase I, Characteristics of acoustic communication is discussed. Also how the underwater sensor network differ- entiates from terrestrial network is briefed. Also some of the underwater projects are taken and their performance is ana- lysed against various criteria.
2.1 Characteristics of Acoustic Communication:
The factors that influence underwater acoustic communica- tions are:
• Path Loss:
Attenuation: It is mainly caused by absorption due to
conversion of acoustic energy into heat. Depth and frequency increases attenuation. Depth of water is the key factor to determine attenuation.
Geometric Spreading: It refers to the spreading of
sound energy when wave front expands. It is fre- quency independent and increases with distance of propagation.
Noise:
Man made noise: Noise caused by machinery, ship-
ping activity in areas with heavy vessel traffic.
Ambient Noise: Noise caused by movement of water,
including tides, currents, storms, wind and rain.[8]
• Multipath:
Multi path propagation may be responsible for the degradation of acoustic communication signal, due to the generation of inter-symbol interference,
Link configuration is major part in multi-path geome-
try. Vertical channels have little dispersion whereas horizontal channels have high multi-path spreads.
• High delay and delay variance:
Large propagation delay might reduce the through- put of the system as the propagation speed is five or- ders lower in magnitude than the terrestrial networks. It also prevents efficient protocol design.
2.2 How Underwater Sensors Networks differs from
Terrestrial Sensor Networks:
The major differences in terrestrial and underwater sensor networks are:
• In terms of Expenses: Compared to the terrestrial sen- sor nodes, underwater sensor nodes are more expensive devices. This is due to the requirement of the complex transceivers and protection of devices which is neces- sary to sustain in the extreme environment.
• In terms of how it is deployed: Terrestrial sensor net-
works can be densely deployed but in underwater, the deployment of the sensor nodes is sparser due to the cost and the challenges associated with it.[9]
• In terms of Power Consumptions: The acoustic under-
water communications need more power than the pow- er consumed by the terrestrial communications due to higher distances and more complex signal processing.
• In terms of Storage Capacity: The sensor nodes in the
terrestrial environment have limited storage capacity, so underwater sensors may need to be able to do some da- ta caching as the underwater channel may be intermit- tent.
2.3 Conventional Methods of Deploying Underwater
Sensors:
Conventional Methods for deploying Underwater Sensor Networks for oceanic environment is to deploy underwater sensors and recover the instruments, which in the mean time record data.[10] Some disadvantages exist in this approach. They are:
• Difficulty in live monitoring: The data that is recorded
cannot be retrieved until the instrument is recovered. This might take several months from the beginning of
IJSER © 2014 http://www.ijser.org
The research paper published by IJSER journal is about Deployment Model of an Underwater Sensor Network in a Swimming Pool Environment with a suitable Localization Scheme, published in IJSER Volume 5, Issue 7, July 2014 Edition. 288
ISSN 2229-5518
the deployment. This cannot be applied in vigilence or in habitat tracking.
• No interaction with sensor nodes: There is no interac-
tion between the sensors and the base station during the deployment period. So it is not possible to reconfigure the system if there is any need.
• Difficulty in detecting failure nodes: If failures occur
in the system, it is not possible to detect until the in- strument is recovered. This may lead to the failure of the mission.
• Low Memory: The major drawback is the amount of da-
ta that is recorded by every sensor during deployment is limited to the capacity of the onboard storage devices.
2.4 Performance Evaluations of Various UASN Pro- jects:
As part of the study, various Underwater Sensor Net- works projects across the world are taken and their perfor- mance is evaluated against different criteria. The criteria taken for this evaluation are Reliability, Efficiency, Longevi- ty, Affordability and Social benefit. These projects are com- pared against three values high, medium and low. In terms of efficiency three projects have shown full efficiency and two projects have shown medium and rest of them shows low. Similarly other parameters are compared against dif- ferent projects.[18]
3. LOCALIZATION METHODS- PHASE II
Based on the survey conducted on various underwater projects across the world, there exists some error in the localization of super nodes in underwater environment. Localization is the process of estimating the location of the sensors and the goal of localization is to determine the physical coordinates of group of sensors.[11],[12] Super Node localization is the process of determining the location of super nodes in the specified area. The accuracy of localization is very important in any sensor network. Many localization algorithms have been proposed for sensor nodes but there exists only few for super node localization. Super nodes are powerful nodes, which works as reference clocks. They always maintain synchronization with surface buoys and it can perform moving speed estimation.[13] Protocols for localization are classified into two. They are Range based and Range free protocols. Range based scheme uses hardware to find distance between anchor nodes and sensor nodes, which is expensive. In Range free scheme, anchor node identifies its position and informs other nodes by passing message.[14], [15]
3.1 Underwater Sensor Networks Model:
In this paper, the network architecture for underwater sensors are considered in a hierarchical manner. Fig 1 shows the model of the underwater sensor networks which consists of
three different types of nodes.
• Surface buoys: Surface buoys floats on the surface of the water and it is equipped with GPS in order to transfer the data.
• Super Node: Super nodes are powerful nodes, which works as reference clocks. They always maintain synchronization with surface buoys and it can perform moving speed estimation.[13]
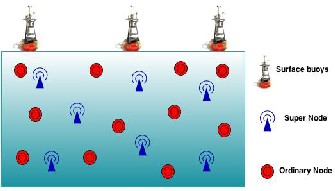
• Ordinary Nodes: Ordinary nodes are sensor nodes which are trying to be synchronized. It cannot communicate with surface buoys directly. Instead it can communicate with themselves or with super nodes.
Fig 1: Underwater Sensor Networks Model
3.2 Overview of PSO Algorithm:
Particle swarm optimization (PSO) is a population based stochastic optimization technique, inspired by the social be- havior of birds. It was developed by Dr. Eberhart and Dr. Kennedy in 1995. The algorithm is very simple yet power- ful.[16]
The algorithm is initialized with particles at random posi- tions, and then it explores the search space to find better solu- tions. In every iteration, each particle adjusts its velocity to follow two best solutions. The first is the cognitive part, where the particle follows its own best solution found so far. This is the solution that produces the lowest cost (has the highest fit- ness). This value is called pBest (particle best). The other best value is the current best solution of the swarm, i.e., the best solution by any particle in the swarm. This value is called gBest (global best).[17] Then, each particle adjusts its velocity and position with the following equations:
IJSER © 2014 http://www.ijser.org
The research paper published by IJSER journal is about Deployment Model of an Underwater Sensor Network in a Swimming Pool Environment with a suitable Localization Scheme, published in IJSER Volume 5, Issue 7, July 2014 Edition. 289
ISSN 2229-5518
The particle’s velocity is adjusted by the equation:
vi,d (it+1) = vi,d (it) + -------- (1)
c1 * Rnd(0,1) * [pbi,d (it) – xi,d (it)] +
c2 * Rnd(0,1) * [gbd (it) – xi,d (it)]
The particle’s position is adjusted by the equation:
xi,d (it+1) = xi,d (it)+ vi,d (it+1) -------- (2) Table 1: Parameters and captions
all the super nodes will be localized and communication will be done among the localized super nodes. This localization process is for mobile underwater sensor nodes. As the nodes
will be keep on moving, the whole procedure is repeated until certain level of iteration. This helps for the efficient packet de- livery, minimized localization error, minimized packet drop ratio, etc., which is the major drawback of the existing work.[19]
Proposed Algorithm for super node localization
Step 1: Initialize
Step 2: Repeat
Step 3: While (all super nodes are not identified and local-
ized)
Step 4: Select nodes (S) based on range R Step 5: For each particle i in S do
Step 6: Calculate pbi,d
Step 7: End for
Step 8: Set gbd = MAX(pbi,d)
Step 9: Set node with MAX(pbi,d) as Super Node and Lo- calize it in gbd position.
Step 10: For each particle p in S Step 11: vi,d (it+1) = vi,d(it) +
c1 * Rnd(0,1) * [pbi,d(it) – xi,d(it)] +
c2 * Rnd(0,1) * [gbd(it) – xi,d(it)] Step 12: xi,d(it+1) = xi,d(it)+ vi,d (it+1)
Step 13: end for
Step 14: end while
Step 15: it = it+1
Step 16: until it> MAX iterations
3.3 Localization Procedure:
The algorithm is initialized with nodes at random positions, and then it explores the search space to find better solutions. In every iteration process, each node adjusts its position and velocity using the above specified equations (1) and (2), to fol- low two best solutions. The first one is the best solution (fit- ness) it has achieved so far. (The fitness value is also stored.) This value is called pbest. Another "best" value that is tracked by the particle swarm optimizer is the best value, obtained so far by any node in the population. This best value is global best and called as gbest. Among the selected nodes within the range of the super node, the node with the gbest value is set as super node. Similarly same procedure is applied to other nodes in the search space, and super nodes for the next group of nodes are localized. The present localized super node com- municates with the previous super node and so on. Likewise
4. DEPLOYMENT MODEL- PHASE III
Based on the above study on various underwater projects, a localization algorithm using PSO has been proposed for the underwater sensors which help time synchronization. Now a deployment model is proposed for the indoor swimming pool to prevent children drowning.
4.1 A Deployment Model for Indoor Swimming Pool:
The deployment model of the proposed work for an indoor swimming pool is shown in Fig 2. Here number of mobile sen- sors will be suspended at certain depth from the water surface in the swimming pool. The parameters of the sensors would be weight, movement and range. The sensors could sense all these parameters of a person. If a person enters the pool, the system will check whether the entered person is child or an adult using the sensors by measuring weight of the individual. If the entered person weighs above 10 kg, then he/she is an
IJSER © 2014 http://www.ijser.org
The research paper published by IJSER journal is about Deployment Model of an Underwater Sensor Network in a Swimming Pool Environment with a suitable Localization Scheme, published in IJSER Volume 5, Issue 7, July 2014 Edition. 290
ISSN 2229-5518
adult and the sensors will not consider. If it weighs less than
10 kg, then the entered person is a child and a sensor considers
them. And for the entered child a mobile sensor will be allot-
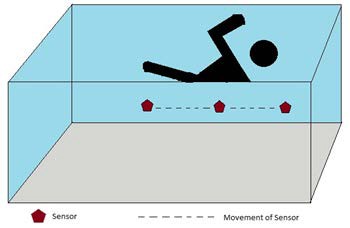
ted and it will monitor the movement of the child at a certain depth from the water surface. According to a study, a normal child cannot hold his/her breath more than 35 seconds of time. As the sensors track the motion of the child, in case of any emergency it can sense it. If a child lies down the water surface for more than 30 seconds, the sensors activates the alarm. The alarm can ring at 100 decibel sound alerting the nearby per- sons to save the child. The deployment of mobile sensors can be done based on our previous study. The localization of the nodes are done based on the PSO algorithm according to Phase II. So in such a way this model could be deployed in an indoor swimming pool environment and thus it could help to prevent children from drowning.
Fig 2: Deployment Model for Indoor Swimming Pool
4.2 System Flow:
Fig 3 illustrates the system flow diagram of the proposed work. The system starts with a person A enters into the swimming pool. He can be any person, child or an adult. First the sensors have to identify whether the entered person is a child or an adult. This can be done by sensing the weight of the entered person. Usually children will weigh around 10 kilograms. So the system identifies the person by sensing their weight. If an entered person weighs above 10 kgs, the system identifies the person as adult and leaves. If the entered person weighs below 10 kgs, it makes sure the entered person is a child and a mobile sensor is allotted.
The mobile sensor will be moving along with the child to
ensure child’s safety. It will be moving at a certain depth below the swimming child, sensing the movement of the child. Ac- cording to a study, a normal child can hold its breath for only
35 seconds of time. Suppose if a child lies below the water sur- face above 35 seconds it could be dangerous. So keeping that in mind, the system has been designed based on the average
time taken by a child to hold his/her breath.
The sensor which moves along with the child tracks their
movement and if at any case the child lies below the surface of
the water for more than 30 seconds, the sensor activates the alarm. The alarm is placed above the water surface and it can ring at 100 decibel sound. This shows the people above the water surface that a child is drowning. If a child doesn’t come under the surface of water for a longer period, then everything would be fine and the sensor would be continuously tracking the movement of the child.
Fig 3: System flow diagram
CONCLUSION:
In this paper, a brief study has been made on the im- portance of security measures to be taken in a swimming pool which prevents the children from drowning. Also efforts had been made to solve this issue through the research work. The detailed study of underwater sensors has been made by split- ting the entire paper into three phases. In phase I, survey is
IJSER © 2014 http://www.ijser.org
The research paper published by IJSER journal is about Deployment Model of an Underwater Sensor Network in a Swimming Pool Environment with a suitable Localization Scheme, published in IJSER Volume 5, Issue 7, July 2014 Edition. 291
ISSN 2229-5518
conducted for various underwater sensor network projects across the world and the quality of them are compared against various criteria. In the second phase a solution has been ar-
rived for the problem of super node localization that exists in the underwater sensor networks. Also the need for localization and how the localization error affects the time synchronization process among the communication of the underwater sensors in a network is shown. An algorithm using PSO had been pro- posed to overcome this issue. In third phase, based on the study of phase I and phase II, deployment model is created which could solve the problem of children drowning in the indoor swimming pool. Here in this deployment model an assumption of tracking the movement of the children has been made using mobile underwater sensors.
REFERENCES:
[1] Heidemann J.; Stojanovic M.; Zorzi M.; Underwater Sensor Networks: Applications, Advances, and Chal- lenges, Royal Society, Phil. Trans. R. Soc. A (2012) 370,
158–175.
[2] Akyildiz I.F.; Pompili D.; Melodia T.; Underwater acoustic sensor networks: research challenges, Ad
Hoc Networks 3 (2005) 257–279
[3] Hart J.K.; Martinez K.; Environmental Sensor Net- works: A revolution in the earth system science, Earth-Science Reviews 78 (2006) 177–191
[4] Dhillon S.S.; Chakrabarty K.; "Sensor placement for effective coverage and surveillance in distributed sen-
sor networks", IEEE Wireless Commun. Networking
Conf., vol. 3, pp.1609 -1614 2003
[5] Leonard N.; Paley D.; Lekian F.; Sepulchre R.; Fra- tantoni D.; Davis R.; 2007. Collective motion, sensor networks, and ocean sampling. Proceedings of the IEEE 95 (1), 48–74
[6] Teymorian A.Y.; Cheng W.; Ma L.; Cheng X.; Lu X.; Lu Z.; 3D Underwater Sensor Network Localization, IEEE Transactions on Mobile Computing, Vol. 8, No.
12, December 2009
[7] Gouws R.; Nieuwoudt A.; Design and Cost Analysis of an automation system for Swimming Pools in
South Africa. Proceedings of the 20th Domestic Use of
Conference (DUE),2012
[8] R.J. Urick, Principles of Underwater Sound, McGraw- Hill, 1983.
[9] Akyildiz I.F.; Pompili D.; State-of-the-art in protocol research for underwater acoustic sensor networks. In: WUWNet 2006. Proceedings of the 1st ACM interna- tional workshop on Underwater networks (2006)
[10]J.G. Proakis, J.A. Rice, E.M. Sozer, M. Stojanovic, Shal- low water acoustic networks, in: J.G. Proakis (Ed.), En-
IJSER © 2014
cyclopedia of Telecommunications, John Wiley and
Sons, 2003.
[11] Bachrach J.; and Taylor C.; Handbook of Sensor Net- works, chapter Localization in Sensor Networks. Wiley, 2005.
[12] Chandrasekhar V.; Seah W.K.; Chaoo Y. S.; and Ee H.V.; “Localization in Underwater Sensor Networks - Survey and Challenges,” Proc. ACM Int’l Conf. Un- derWater Networks and Systems (WUWNet ’06), pp.
33-40, Sept. 2006.
[13] Liu J.; Zhou Z.; Peng Z.; Cui J.H.; Zuba M.; and Fiondella L.; “Mobi-Sync: Efficient Time Synchroniza- tion for Mobile Underwater Sensor Networks,” IEEE Trans. Parallel and Distributed Systems (TPDS), Feb.
2013.
[14] Zhou Z.; Cui J.H.; and Zhou S.; “Localization for Large-Scale Underwater Sensor Networks,” Proc. Sixth Int’l IFIP-TC6 Conf. Ad Hoc and Sensor Net- works, Wireless Networks, Next Generation Internet (Networking), May 2007.
[15] Hussain N.T.M.; “Distributed Localization in Clut- tered Underwater Environments,” Proc. ACM Int’l Workshop UnderWater Networks (WUWNet), Sept.
2010.
[16] Kennedy J.; and Eberhart R.C.; “Particle swarm op- timization,” IEEE International Conference on Neural Networks, vol.4, pp. 1942-1948, Perth, Australia, 1995
[17] Del Valle Y.; Venayagamoorthy G.K.; Mohagheghi S.; Hernandez J.C.; and Harley R.; “Particle swarm opti- mization: Basic concepts, variants and applications in power systems,” IEEE Trans. Evol. Comput., vol. 12, no. 2, pp. 171–195, April 2008.
[18]Caroline Joyce M.; Vanitha K.; A Study on the Charac- teristics and Applications of Underwater Acoustic Sensor Networks, Wide Spectrum Journal (Under Re- view)
[19]Caroline Joyce M.; Vanitha K.; A Localization Scheme for Super Nodes in Underwater Sensor Network Us- ing PSO Algorithm, International Conference on Mathematical and Computational Sciences, Jan 2015 (Under Review)
http://www.ijser.org