International Journal of Scientific & Engineering Research Volume 2, Issue 6, June-2011 1
ISSN 2229-5518
Autonomous System Controller for Vehicles
Using Neuro-Fuzzy
Umer Farooq, M. Saleem Khan, Khalil Ahmed, M. Anwaar Saeed and Sagheer Abbas
Abstract— this paper presents the approach of neuro fuzzy systems to design autonomous vehicle control system. The purposed int elligent controller deliberat es obstacles avoidance, unstructured environment adaptation and speed scheduling of aut onom ous vehicle based on neuro-fuzzy with reinforcement learning mechanism. The purposed syst em provides the autonomous vehicle navigation and speed control in unstructured and unsafe environment..
Index Terms— Autonomous Vehicle Controller; Autonomous Vehicles Speed Control; Neuro-Fuzzy Vehicle Control System; Obstacles Avoidance Syst em.
—————————— • ——————————
1. INTRODUCTION
he autonomous vehicles system is an important research area in which a lot of work has been done in vehicles controlling systems. Autonomous vehicles have prospective application in many fields, such system are used for assisting human in dangerous environments, conducting military and performing routine tasks for
industry[1]-[2].
Traffic congestion problem due to human driving
involves reaction time weakness and error in judgment that
causes accidents and affects the smooth traffic flow. The
automated highway systems are purposed for the main
objectives i.e. automated vehicle control and traffic control
technologies. Intelligent cruise control is an advance vehicle
control system that manages an appropriate actuator action
for safe speed and distance control [3].
A lot of systems are purposed about the intelligent
transport system, including smart vehicles, driving safety
and traffic mobility. There are many applications for the
vehicles control like driver assistants system [4]. GPS based
navigation control, environment awareness system and
others. GPS/INS sensor base path tracking system, steering
controller incorporated with speed controller based on the
finite preview optimal control method [5]
————————————————
• Umer Farooq is with Computer Science department as a faculty member and a research fellow at NCBA&E Lahore, Pakistan (e-mail: umer@ncbae.edu.pk ).
• M. Saleem Khan is with the Computer Science Department as Director in
GC University Lahore, Pakistan (e-mail: mskgcu@yahoo.com ).
• Khalil Ahmed is with the School of Computer Science at NCBA&E
Lahore, Pakistan; He is an expert academician and passionately engaged in research. (e-mail: drk@ncbae.edu.pk ).
• Muhammad Anwaar Saeed is with Computer Science department as
research fellow at NCBA&E Lahore, Pakistan. He is currently working as
faculty member in VU, Lahore, Pakistan (e-mail: m_a_saeed@yahoo.com )
• Sagheer Abbas, is with Computer Sciences department as faculty member
and a research fellow at NCBA&E Lahore, Pakistan.( e-mail:
sagheeer@hotmail.com).
This research paper is organized as follows: section II describes the brief introduction of fuzzy inference system (FIS), and Neuro-Fuzzy systems (NF). Structure of the proposed autonomous vehicle Speed Controller is discussed in section III, while section IV is the simulation in MAT Lab. Section V is having experimental results and discussion. This paper is concluded with remarks on the proposed model and future work in section VI. In section VII acknowledgement of this work is mentioned.
2. OVERVIEW OF FUZZY INFERENCE SYSTEM AND
THE NEURO-FUZZY SYSTEM
Fuzzy logic is the formalization of human capabilities, reasoning and rational decision making in an environment of imprecision, uncertainty, incompleteness, inconsistent of information and performing physical and mental task without measurement and calculation [6].
The applications of fuzzy logic are multi-disciplinary in nature include automatic control, consumer electronics, signal processing, information retrieval, database management, computer vision, data classification, decision making and so on [7].
The remarkable perspectives of fuzzy logic systems are neuro-fuzzy systems, the first hybridization of fuzzy logic systems and artificial neural networks in soft computing. The neuro fuzzy systems have fuzzy logic knowledge representation ability with the learning capability of artificial neural networks. Fuzzy logic and artificial neural networks are used for the different intelligent systems. ANNs distributed processing capability of large no of computational simple element while fuzzy logic is related to reasoning on a higher level. Fuzzy systems do not have the capability of learning, adaptation and distributed computing. The neuro-fuzzy systems make the adaptation mechanisms of neural network with the symbolic components of fuzzy inference system [8].
IJSER © 2011
h ttp://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 6, June-2011 2
ISSN 2229-5518
Figure 1 shows a fuzzy based speed control with four sided sensors inputs. The two types of inputs are considered using hard and the flexible conditions, the variation of speed will accord on the flexible condition and the speed will be zero whenever the hard condition meets.
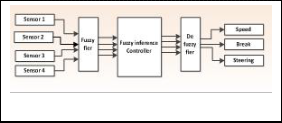
The inputs are fuzzifiered by the fuzzyfier module and then provide these inputs to the FIS module consisting of three conceptual components: a rule base, a data base and a reasoning mechanism. Fuzzification represents the member functions of the linguistic terms of the input variables and defuzzification to generate defuzzified values that represent the achieved level of a speed for the fuzzified variable
To control a vehicle speed autonomously, the control system must have the ability for the adaptation of environment. In the purposed controller of speed three types of sensors are used for the sensing the environment. The location of the current state can be determined by the GPS system or by calculating a travel path from its starting point with the use of electronic compass. These sensors tackle flexible conditions like road condition environment condition (pleasant or stormy), leading distance and hard condition like accident on road or blocked road. On the flexible condition the variation of speed will be calculated, it can be a high medium or low based range of the variable value and if the hard condition meets, the speed will be zero. On the sensed information steering, transmission, acceleration and braking modules will be activated. These modules are connected to the neuro fuzzy inference system to adapt the inputs and calculate the desired speed on the bases of the inputs and the desire input for the steering, transmission, acceleration and braking modules.
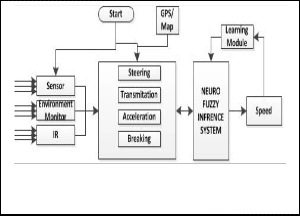
Fig. 1 Fuzzy Based Speed Scheduling Model
There are many reinforcement learning techniques to solve the problems. The selection of optimal policy computed by the reinforcement learning can be used to generate fuzzy rules. Neuro fuzzy systems such adaptive network based fuzzy inference system can be used to learn fuzzy if-then rules for the weight selection problem using the training data obtained from RL’s optimal policy [9].
The autonomous vehicle should be able to manage the driver task therefore it has to manage complex traffic situations in real time The autonomous vehicles control systems research primary goal to make driving on road harmless and easy. The suggested neuro-fuzzy inference engine the adaptation of environment and controlling the speed of the vehicle.
3. DESIGN AND STRUCTURE OF PROPOSED SYSTEM
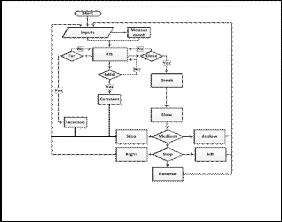
The figure 2 shows the data flow of the vehicle control. In the figure sensed data hard and flexible is provided to the fuzzy inference with incorporating the measurement. The fuzzy inference module groups measurement into the three major classes, far, medium and close. The action of the each class is different for each group. If the input leading distance close then the system will decrease the speed if it is in medium, then speed will remain constant and if the Leading distance is far then speed will be increased.
Fig. 3.Neuro-fuzzy System Speed Controller
4. NEURO-FUZZY SYSTEM STRUCTURE
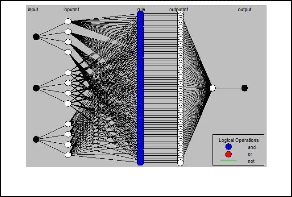
The figure 4 shows the ANFIS structure. ANFIS is the hybrid of Artificial Neural Networks and Fuzzy inference system. ANNs map input to output through the collection of layered processing elements that are organized in parallel by synaptic junctions. Each pass data, signals propagate from the input to output layer to produce output which is compared to the desired output. The difference between output and desired output is then adjusting the synaptic connection (weight). This process gives ANNs, the ability of looking for patterns to provide the advantage of learning. FIS is based on Fuzzy Logic, IF-THEN rules and fuzzy reasoning which can link to human reasoning through linguistics variables. The combination of ANNs and FIS of ANFIS, integrates the benefits of the individual intelligent systems to develop the superior technique that can optimally model the dynamics of difficult systems such as autonomous vehicle speed controller.
Fig. 2. Block-diagram Data flow for Neuro-Fuzzy Inference
System
IJSER © 2011
h ttp://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 6, June-2011 3
ISSN 2229-5518
In layer 4, the normalization layer, the ratio of each rule’s firing strength is calculated according to Equation (5).

4 = w
i
(()

= wi
w1 + w2 + w3 + + w64
Layer 5 is the defuzzification layer; the output of each input node is the weighted consequent value as in Equation (6).
Figure 1. Neuro-fuzzy system with three parameters

Li = w f

= w( p i + qi + ri )
(6)
ANFIS is 6 layers Feedforward neural network and of
Summation layer , layer 6 is an output layer which is the
sum of all the outputs of the layer 5 as in Equation (7).
the sugeno FIS type. In this paper we present 3 inputs and 1 output for the ANFIS with 3-dimensional input-output
Li =

L. w fi
= L. wi f i
w
space. The layer 1 represents the input layer of raw data
L. i
(7)
entry for ANFIS. Neural network clasifies data and looks
for patterns within it. The input data in 3- dimentional
space, it is classified in groups calld fuzzy space. The raw
input data or crisp value are compared with the
membership function in the antecedent of the antecedent of the rulesof ANFIS, to determined the degree to which inputs. EM, RC and LD belong to fuzzy sets S1 S2 and S3 respectively. The degree to which the inputs lie in the fuzzy space is given the value between 0 and 100. This process is known as fuzzification and takes place in layer 2 as given in Equation (1), (2) and (3).
The number of epochs was 10000 for training. The numbers of MFs for the input variables are 4. The number of rules is then 64(4×4×4) then the triangular MF is used for three input variables.
Therefore, the ANFIS used here contains a total 292
parameters, of which 36 (4×3+4×3+4×3=36) are the premise
parameters and 256 (4×64) are the consequent parameters.
The training testing and checking errors obtained from
the ANFIS are 4.194, 4.2913and 4.2134 respectively.
5. RESULTS AND DISCUSSION
The result form the ANFIS, grid partitioning technique showed training error, testing error and checking error as
Li = Ai (RC )
(1)
in Figure 5 Figure 6 and Figure 7.
Table 1 show; if all variables are found at their best value then the speed will be very high to be adopted. Likewise if
Li
L2
= Bi (LD ) (2)
= Ci (EM ) (3)
any varibale has the low value among sensing parameters then the speed will be low.
TABLE I. INPUT OUTPU LINGUISTIC REPRESENTAI ON.

Once the location in the fuzzy space identified, then the product of the degrees to which inputs satisfy the membber ship function is found. This product called the firing strength of a rule and represented in layer 3 shown in Equation (4), called rule layer.

li = wi = Ai (RC ) Bi (L D ) Ci (E M ) (4)
The data taken for system from 0 to 100 for all inputs variable and 0 to 120 for the output variable. The Sample of
400 pairs out of the total possiable combination 105 used for the traning of the ANFIS with the backpropagation technique, 53 pairs of data is used for testing and 40 pairs of data is used for the checking of the network.
IJSER © 2011
h ttp://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 6, June-2011 4
ISSN 2229-5518
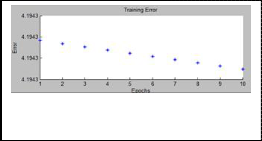
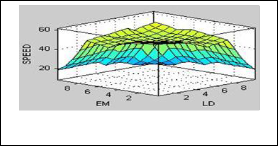
Figure 5 shows the traning results, the sample of 400 pairs is used for traning of the neuro-fuzzy system. The error rate is 4.1943 on the 25000 epochs.
Fig. 5.Traning error for the neuro fuzzy system
Fig. 9. Surface graph Bet ween input variable EM and LD
against output variable Speed
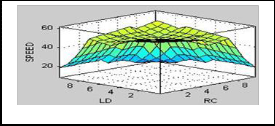
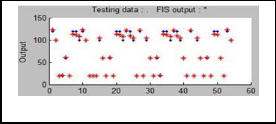
Figure 6 shows the testing results, the sample of 53 pairs of data set is used for the testing of the neuro fuzzy system. Error rate of the testing of the system was 4.2913.
Fig. 6.Traning error for the neuro fuzzy system
Fig. 10. Surface graph Bet ween input variable LD and RC
Figure 11 concludes the resutls, if the speed lies in the low category then systen will check the LD. If LD is detected in very high intensity then the speed will increase, if it is perceived in medium then speed will be normal and LD is sensed very low the system will propose for the lane change.
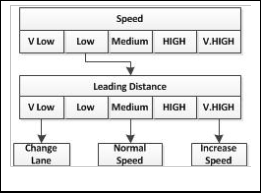
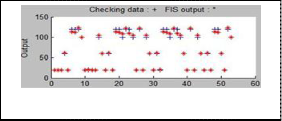
Figure 7 shows the checking result of the neur-fuzzy system. Sample of 53 data pairs is used for the checking the resultant erro is 4.2134.
Fig. 7.Checking Data result for neuro fuzzy system
Fig. 11.Result for LD when speed is low.
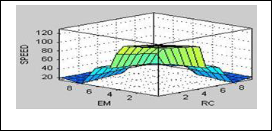
The Figure 8, Figure 9, and Figure 10 show the surface graps of the input variables. Figure 8 shows the relation of EM and RC on the speed. If EM and RC have the low sensing intesity the speed will be high. Figure 9 shows the relation of LD, RC and figure 10 shows EM and LD.
Fig. 8. Surface graph Between input variable EM and RC
6. CONCLUSION AND FUTURE WORK
The human reaction time, weakness and error in judgment cause accident and affect the smooth traffic flow. The autonomous speed controller deliberates obstacles avoidance and unstructured environment adaptation for the autonomous vehicle.The autonomous vehicle will manage the driver task with complex traffic situations in real time to make driving on road harmless and easy.A neuro fuzzy approached is used for the autonomous vehicle speed controller. The system knowledge representation and the learning mechanism make easy to adapt the environment and control the speed to avoid the traffic congestion and collision.
In future state of the art Microelectronics technology can help to develop the hardware of the system to achieve the required goal.
IJSER © 2011
h ttp://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 6, June-2011 5
ISSN 2229-5518
ACKNOWLEDGMENT
This research work was carried out in the laboratories of GC University and NCBA&E, Lahore, Pakistan. We must acknowledge the support of fellows of research group and laboratories personals for their sympathetic and encouraging behavior
REFERENCES
[1] D.C.Slaughter; Giles, D.K.; Downey, D. “Autonomous Robotic
Weed Control Systems”: Elsevier, pp. 63-78, 2008.
[2] Real-time indoor autonomous vehicle test environment. How, J.P; BEthke, B; Frand, A.; Dele, D. April 2008, Cambridge : IEEE,
2008, Vol. 28 issue:2.
[3] An Intelligent Longitudinal Controller for Application in
Semiautonomous Vehicles. Lin Cai;AhmadB.Rad. s.l. : IEEE,
2010.
[4] An Image Processing System for Driver Assistance. U.Handmann; T.Kalinke;C. Tzomakas; M.Werner;W.v.Seelen. s.l. : ELSVIES,
2000.
[5] De sign and Testing of a Controller for Autonomous Vehicle Path Tracking Using GPS/INS Sensors. JuyongKand; Rami Y. Hindiyeh; seugnwuk Moon; J. Christian Gerdes .Kyongsuyi. Seoul,Korea : international Dederation of Automatic Control,
2008. Proceedings of The 17th World Congress.
[6] Is there a need for fuzzy logic? Zadeh, Lotfi A. s.l. :Exsevier,
2008, pp. 2751-2779.
[7] Application of Neuro-Fuzzy Systems to Behavioral Representation in Computer Generated Forces, Gary R. George P. E. and Frank Cardullo,
[8] An Overview on Soft Computing in Behavior. Hoffmann, Frank.2003Volume 2715/2003, 544-551, DOI: 10.1007/3-540-
44967-1_65
[9] Ne uro-Fuzzy Learning of Strategies for Optimal Control Problems.
Ka mali, Kaivan, et al., et al. 2002.

Mr. UmerFarooq, is M.Phil scholar at School of Computer Science National College of Business administration & Economics(NCBA&E)Lahore, Pakistan and his area of research is Artificial Intelligence, Machine Reflexes and Fuzzy Modeling.
(e-mail: umer@ncbae.edu.pk).

Mr. M. Salee m Khan is an Assistant Professor at the GC University Lahore Pakistan. Currently he is working as director Computer Science Department in GC University, Lahore, Pakistan. He availed research fellowship at The School of Electronics & Engineering, University of Edinburgh, UK and completed his Ph.D. thesis in the field of control systems design, simulation and analysis in local and distributed environment. He contributed his services on various projects in the field of Advanced Electronics and Communication. His research
interests include control systems design and industrial applications. He promoted a large team of Electronics researchers and organized this field in
his country. Mr. Khan had also been served as a senior scientific officer in a classified defense research organization in his country. (e-mail: mskgcu@yahoo.com).

Khalil Ahmedis the Director School of Computer Science at National College of Business Administration and Economics (NCBA&E) Lahore, Pakistan. He is an expert academician and passionately engaged in research. His area of research is machine consciousness, A.I. and knowledge management. He earned his PhD degree in the fields of Computer Sciences and Robotics from USA and Japan.
(e-mail: drk@ncbae.edu.pk).

Muhammad Anwaar Saeed is a Ph.D. scholar at school of computer science, National College of Business Administration and Economics (NCBA&E), Lahore, Pakistan. His research area is A.I. and knowledgeManagment, Data security and Fuzzy Modeling.
(E-mail: m_a_saeed@yahoo.com)

Mr. Sagheer Abbas, M.Phil. Scholar in the field of Computer Sciences at National College of Business Admi nistration and Economics NCBA& E, Lahore, Pakistan . His research area includes Artificial Intelligence, Quantum Computing and Sparse Distributed Memory.
(E-mail: sagheeer@hotmail.com).
IJSER © 2011
h ttp://www.ijser.org