International Journal of Scientific & Engineering Research Volume 2, Issue 5, May-2011 1
ISSN 2229-5518
Autonomous Room Air Cooler Using Fuzzy
Logic Control System
M. Abbas, M. Saleem Khan, Fareeha Zafar
Abstract— This research paper describes the design and implementation of an autonomous room air cooler using fuzzy rule based control system. The rule base receives two crisp input values from temperature and humidity sensors, divides the universe of discourse into regions with each region containing two fuzzy variables, fires the rules, and gives the output singleton values corresponding to each output variable. Three defuzzifiers are used to control the actuators; cooler fan, water pump and room exhaust fan. The results obtained from the simulation were found correct according to the design model. This research work will increase the capability of fuzzy logic control systems in process automation with potential benefits. MATLAB-simulation is used to achieve the designed goal.
Index Terms— Fuzzy Logic Control, Inference Engine, MATLAB simulation and Rule Selection.
—————————— • ——————————
ODERN processing systems are heavily dependent on automatic control systems. The control automa- tion has become essential for machines and
processes to run successfully for the achievement of con- sistent operation, better quality, reduced operating costs, and greater safety.
The control system design, development and im- plementation need the specification of plants, machines or processes to be controlled. A control system consists of controller and plant, and requires an actuator to interface the plant and controller. The behaviour and performance of a control system depend on the interaction of all the elements. The dynamical control systems design, model- ing and simulation in local and distributed environment need to express the behaviour of quantitative control sys- tem of multi-input and multi-output variables control environment to establish the relation between actions and consequences of the control strategies [1].
Computational Intelligence (CI) is a field of intelli- gent information processing related with different branches of computer sciences and engineering. The fuzzy systems are one paradigm of CI. The contemporary technologies in the area of control and autonomous processing are benefited using fuzzy sets [2].
The user based processing capability is an impor-
tant aspect of fuzzy systems taken into account in any design consideration of human centric computing sys- tems. The human centricity plays a vital role in the areas
————————————————
• M. Abbas is working as Visiting Faculty in the Department of Electrical Engineering in National University of FAST Lahore and also Lecturer Internee in Physics, Government Islamia College, Lahore, Pakistan (e-mail: shairabbas@yahoo.com)
• Dr. M. Saleem Khan is with the GC University Lahore Pakistan, working as Director Computer Science Department
(e-mail: mskgcu@yahoo.com, s.khan@ed.ac.uk)
• Dr. Fareeha Zafar is an Assistant Professor in the Department of
Computer Science, GC University, Lahore, Pakistan
(email: dr.f.zafar@gcu.edu.pk)
of intelligent data analysis and system modeling [3]. The elements of fuzzy sets belong to varying degrees of mem- bership or belongingness. Fuzzy sets offer an important and unique feature of information granules. A member- ship function quantifies different degrees of membership. The higher the degree of membership A (x), the stronger is the level of belongingness of this element to A. Fuzzy sets provide an ultimate mechanism of communication between humans and computing environment [4].
The fuzzy logic and fuzzy set theory deal with non- probabilistic uncertainties issues. The fuzzy control sys- tem is based on the theory of fuzzy sets and fuzzy logic [5]. Previously a large number of fuzzy inference systems and defuzzification techniques were reported. These sys- tems/techniques with less computational overhead are useful to obtain crisp output. The crisp output values are based on linguistic rules applied in inference engine and defuzzification techniques [6]-[7].
The efficient industrial control with new techniques of fuzzy algorithm based on active rule selection mechan- ism to achieve less sampling time ranging from millise- conds in pressure control, and higher sampling time in case of temperature control of larger installations of in- dustrial furnaces has been proposed [8].
The development of an air condition control system based on fuzzy logic with two inputs and one output us- ing temperature and humidity sensors for feedback con- trol, and three control elements for heating, cooling, and humidity, and formulated fuzzy rules for temperature and humidity has been achieved. To control the room temperature, the controller reads the room temperature after every sampling period [9].
This proposed design work of Autonomous Room Cooling System is the application of fuzzy logic control system consisting of two input variables: Temper- ature and Humidity, and three output variables: Cooler fan speed, Water pump speed and Exhaust fan speed, used in a processing plant of room cooler to maintain the
IJSER © 2011 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 5, May-2011 2
ISSN 2229-5518
required cooling environment. The basic structure of the proposed model is described in Section 2. Section 3 gives the simplified design algorithm of fuzzy logic for room air cooler system. Section 4 describes the simulation re- sults of this system. Conclusion and future work is given in Section 5.
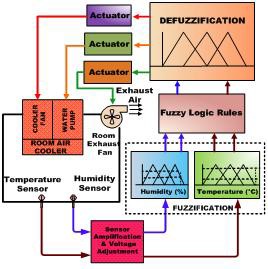
The basic structure of the proposed model of auto- nomous water room cooler consists of room air cooler with fuzzy logic control system. The room cooler mounted in a room has cooler fan, a water pump to spread water on its boundary walls of grass roots or wooden shreds. A room exhaust fan, humidity and tem- perature sensors used to monitor the environment of room are mounted in the room. The sensors with amplifi- cation and voltage adjustment unit are connected with the two fuzzifiers of the fuzzy logic control system. Three outputs of defuzzifiers: cooler fan speed control, water pump speed control and room exhaust fan speed control are connected through actuators.
Fig.1. Block diagram of Autonomous Room Air Cooler System
This simplified design algorithm is used to design the fuzzifier, inference engine, rule base and defuzzifier for the autonomous room air cooling system according to the control strategy of the processing plant to achieve the quantity and quality of the desire needs to maintain the room environment.
This design work uses five triangular membership functions equally determined over a scale range of 0°C to
40°C for the temperature input and 0% to 100% relative humidity inputs. The five fuzzy membership functions
for temperature input are termed as: cold 0-10°C, cool 0-
20°C, normal 10-30°C, warm 20-40°C, and hot 30-40°C. As
for humidity input, the five fuzzy membership functions
are: dry 0%-25%, not too dry 0%-50%, moist 25%-75%, not
too wet 50%-100%, and wet range 75%-100%.This fuzzy
logic model aims to determine the amplitude of the vol- tage signal 0-5v to be sent to the three actuators for: Coo- ler fan speed, water pump speed and room exhaust fan speed to maintain a constant and desired environment.
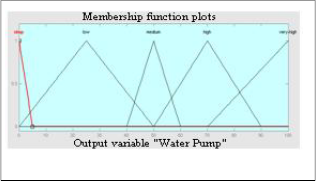
Here no time constrain is applied. Three outputs of this proposed system are: Cooler fan speed, water pump speed and room exhaust fan speed. Each output variable consists of five membership functions: Stop 0-5, Low 0-50, Medium 40-60, Fast 50-90 and Very Fast 90-100.
The set points of fuzzifiers use the data of two input variables, “Temperature” and, “Humidity”. Their occu- pied region description, membership functions and range are given in TABLE 1 and TABLE 2.
TABLE 1
MEMBERSHIP FUNCTIONS AND RANGES OF INPUT VARIABLE TEMPERATURE
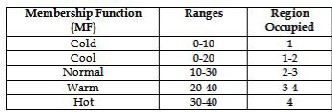
TABLE 2
MEMBERSHIP FUNCTIONS AND RANGES OF INPUT VARIABLE HUMIDITY
For each input variable, five membership functions are used as shown in Fig. 2 and in Fig. 3.
The five membership functions, “Cold”, “Cool”, “Normal”, “Warm”, “Hot” are used to show the various ranges of input fuzzy variable “TEMPERATURE” in a plot consisting of four regions as shown in Fig. 2.
IJSER © 2011 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 5, May-2011 3
ISSN 2229-5518
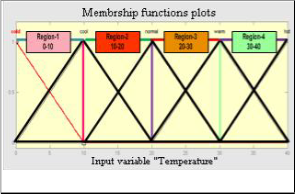
TABLE 4
RULE MAPPING FOR REGIONS OCCUPIED
Fig.2. Plot of membership functions for input variable, “TEMPERATURE”
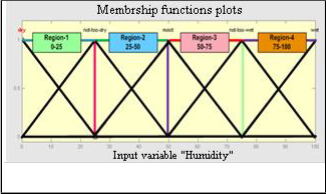
The five membership functions, “Dry”, “Not Too Dry”, “Moist”, “Not Too Wet”, “Wet” are used to show the var- ious ranges of input fuzzy variable “HUMIDITY” in a plot also consisting of four regions as shown in Fig. 3
Fig.3. Plot of membership functions for input variable, “HUMIDITY”
The linguistic values are the mapping values of the fuzzy input variables with the membership functions oc- cupied in the regions [10]. As we are using two variables, therefore four linguistic values are shown in Fig.4. The mapping of input fuzzy variables with the functions in four regions is listed in TABLE 3.
TABLE 3
LINGUISTIC VALUES OF FUZZIFIERS OUTPUTS
IN ALL REGIONS
IJSER © 2011 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 5, May-2011 4
ISSN 2229-5518
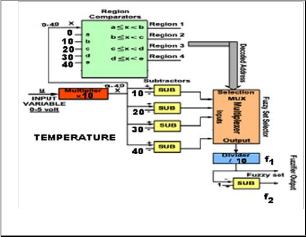
Fig. 5 Internal Hardware Structural Scheme for Four Regions
“TEMPERATURE”
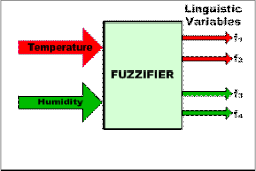
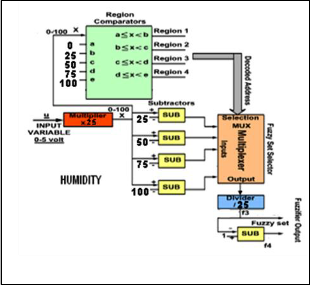
Fuzzifier converts the input crisp value into the lin- guistic fuzzy values. The output of fuzzifier gives the lin- guistic values of fuzzy set. For the two input variables, two fuzzifiers are used which are shown in Table 5.
Fig.4 Fuzzifier Block
Each fuzzifier consists of : a multiplier: which converts the input voltage range 0-5volt into the crisp value 0-40 for temperature by multiplying the input with 10, and the crisp value 0-100 for humidity by multiplying the input with 25, comparators; used to decide the region occupied by the input variable value, subtractors; used to find the difference of crisp value from the end value of each re- gion, multiplexer; using the address information from the region selection and inputs from the four subtractors, multiplex the four values because this system is designed for the four predefined regions, divider; used to divide the difference value in each selected region by 10 to find the mapping value of membership function with the in- put variable value of temperature in that region, and to find the mapping value of membership function for input variable value of humidity, divide the difference value in each selected region by 25, a second fuzzy set subtractor; used to find the active value of the second fuzzy set by subtracting the first active fuzzy set value from 1. The general internal hardware structural scheme of a fuzzifier for four regions is shown in Fig. 5 & Fig. 6 and the results of fuzzification are shown in TABLE 5 for mathematical analysis [11].
Fig. 6 Internal Hardware Structural Scheme for Four Regions
“HUMIDITY”
TABLE 5
RESULTS OF FUZZIFICATION
The inference engine consists of four AND operators, these are not the logical ANDs but select minimum value input for the output. This inference engine accepts four inputs from fuzzifier and applies the min-max composi- tion to obtain the output R values. The min-max inference
IJSER © 2011 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 5, May-2011 5
ISSN 2229-5518
method uses min-AND operation between the four in- puts. Fig. 7 shows this type of inference process.
Number of active rules = mn, where m = maximum number of overlapped fuzzy sets and n = number of in- puts. For this design, m = 5 and n = 2, so the total number of active rules are 25. The total number of rules is equal to the product of number of functions accompanied by the input variables in their working range [12]. The two input variables described here consisted of five membership functions. Thus, 5 x 5 = 25 rules were required which are shown in TABLE 6.
TABLE 6
TOTAL NUMBER OF RULES
ship function “Normal” of temperature in region-3 and the similar definitions are for the others [13].
R1 = f1 ^ f3 = f1[3] ^ f2[2] = 0.2 ^ 0.4 = 0.2
R2 = f1 ^ f4 = f1[3] ^ f2[3] = 0.2 ^ 0.6 = 0.2
R3 = f2 ^ f3 = f1[4] ^ f2[2] = 0.8 ^ 0.4 = 0.4
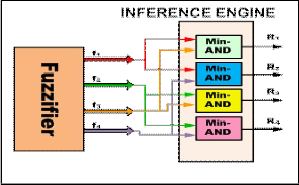
R4 = f2 ^ f4 = f1[4] ^ f2[3] = 0.8 ^ 0.6 = 0.6
Fig. 7 Block Diagram of Inference Engine
The rule selector receives two crisp values of temperature and humidity. It gives singleton values of output functions under algorithm rules applied on design model.
For two variables, four rules are needed to find the corresponding singleton values S1, S2, S3 and S4 for each variable according to these rules are listed in Table 7.
TABLE 7
ILLUSTRATION OF RULES APPLIED MODEL
In this case only 4 rules are required for the particular values of two variables because each value of two variables in a region corresponds to mapping of two functions. The corresponding mapping values of f1[3], f1[4], f2[2], f2[3] were used to establish the 4 rules. Here f1 [3] means the corresponding mapping value of member-
The rule base accepts two crisp input values, distributes the universe of discourse into regions with each region containing two fuzzy variables, fires the rules, and gives the output singleton values correspond- ing to each output variable. Fig. 8 shows the main block diagram of the Rule Base.
IJSER © 2011 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 5, May-2011 6
ISSN 2229-5518
Fig. 8 Rule Base
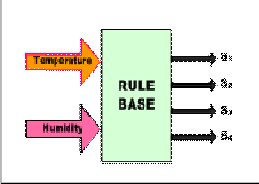
Fig.11. Plot of Membership Functions for Output Variable,
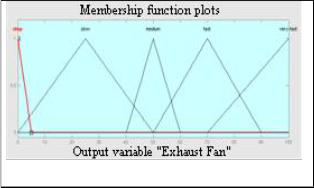
In this system, three defuzzifiers control the actuators; speed of cooler fan, speed of water pump, speed of room exhaust fan. The membership functions of the three out- put variables are shown in Fig. 9 to Fig. 11, and the detail of each plot is given in TABLE 8.
TABLE 8
OUTPUT VARIABLES MEMBERSHIP FUNCTIONS
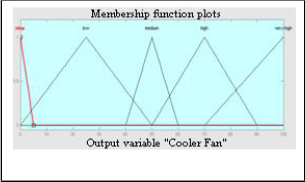
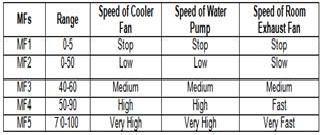
Fig. 9 Plot of Membership Functions for Output
Variable, “Cooler Fan Speed”
Fig.10. Plot of Membership Functions for Output Variable, “Water Pump Speed”
The defuzzification process provides the crisp value outputs after estimating its inputs [14]. In this system 8 inputs are given to each of three defuzzifiers. Four values of R1, R2, R3, R4 from the outputs of inference engine and four values S1, S2, S3, S4 from the rule selector are shown in Fig. 10. Each defuzzifier estimates the crisp value output according to the center of average (C.O.A)
method using the mathematical expression, l:Si * Ri I l:Ri
, where i = 1 to 4. Each output variable membership func-
tion plot consists of five functions with the same range
values for simplification.
Fig.12 shows the design arrangement of a defuz-
zifier. One defuzzifier consists of : one adder for l:Ri , four multipliers for the product of Si * Ri , one adder for l:Si *
Ri , and one divider for l:Si * Ri I l:Ri. Finally a defuzzifier
gives the estimated crisp value output.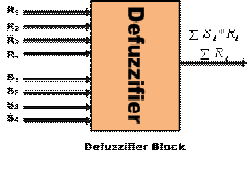
Fig.12 Defuzzifier Block
The designed values for three outputs; cooler fan speed, water pump speed and room exhaust fan speed are given in the Tables 9-11. According to the results of inference engine
l:Ri = R1+R2+R3+R4 = 0.2+0.2+0.4+0.6 = 1.4
IJSER © 2011 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 5, May-2011 7
ISSN 2229-5518
TABLE 9
DESIGNED VALUE FOR COOLER FAN SPEED
l:Si * Ri = 0.85 and l:Si*Ri I l:Ri =0.85/1.4=0.6071
= 60.71% of Cooler Fan Speed
TABLE 10
DESIGNED VALUE FOR WATER PUMP SPEED
l:Si * Ri = 0.90 and l:Si * Ri I l:Ri = 0.90/1.4 = 0.6428
=64.28 % of Water Pump Speed
TABLE 11
DESIGNED VALUE FOR EXHAUST FAN SPEED
TABLE 12
ARRANGEMENT OF MEMBERSHIP FUNCTIONS FOR SIMULATION
In Fig. 13 the same values of input variables, Temperature
= 28, and Humidity = 40 are shown. Various values of input and output variables match the dependency scheme of the system design. The simulated values were checked using MATLAB-Rule viewer as shown in Fig. 13.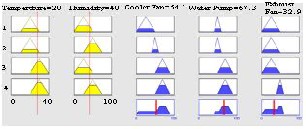
Fig.13. MATLAB-Rule Viewer
The correctness of results shows the validity of the simpli- fied design work for processing system using fuzzy con- trol system.
TABLE 13
COMPARISON OF SIMULATED AND CALCULATED RESULT
l:Si * Ri = 0.50 and l:Si * Ri I l:Ri = 0.50/1.4= 0.3571
= 35.71 % of Exhaust Fan Speed.
Using mathematical expression l:Si * Ri I l:Ri the
crisp values for output variables were determined and the
results were found according to the MATLAB simulation as shown in Fig.13. These results are compared in TABLE
13 and found correct according to the design model. MATLAB simulation was adapted according to the ar- rangement of membership functions for four rules as giv- en in TABLE 12.
This system was simulated for the given range of input variables. The given value of: Temperature = 28 lies in region 3 of the range 20-30 and Humidity = 40 lies in region 2 of the range 25-50. The four rules were applied for MATLAB simulation according to this range scheme. In this design model, the speed of cooler fan depends upon the selected value of temperature sensor, water pump and exhaust fan speeds depend on the value of humidity. The simulated and calculated results are ac- cording to the reliance scheme.
IJSER © 2011 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 5, May-2011 8
ISSN 2229-5518
Fig. 14 shows that the cooler fan speed is directly proportional to temperature and it does not depend upon the humidity. Fig. 15 represents that the water pump speed is inversely proportional to humidity and it does not depend upon the temperature. Fig. 16 shows that the exhaust fan speed is directly proportional to humidity.
Design model of autonomous room air cooler fuzzy logic processing control system provided the results effectively in agreement with the simulation results during the testing of various parts of the control system. The algorithmic design approach makes the system efficient and absolutely under control. This work builds up the control management without the complexity in a processing plant of room cooler to sustain the required cooling environment. The utility of the proposed system in such processing plants is being carried out and in future it will help to design the advanced control system for the various industrial applications in environment monitoring and management systems using state of the art FPGAs based Microelectronics Chips.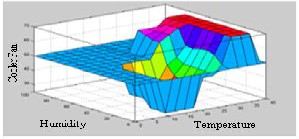
Fig.14 Plot between Temperature-Humidity & Cooler Fan Speed
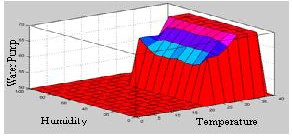
Fig.15. Plot between Temperature-Humidity & Water Pump Speed
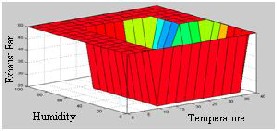
Fig.16. Plot between Temperature-Humidity & Room Exhaust Fan
Speed
[1] E. Frias-Martinez, G. Magoulas, S. Chen and R. Macredie, “Modeling human behavior in user-adaptive systems: Recent advances using soft computing techniques” Expert Syst. Appl.29:2 (2005) 320-329
[2] M. Perkowitz and O. Etzioni, “Adaptive web sites”
Commun ACM 43: 8 (2000) 152-158
[3] M. Spott and D. Nauck, “Towards the automation of intelligentdata analysis” Appl. Soft Comput. 6(2006) 348-
356
[4] S. Gottwald, “Mathematical fuzzy logic as a tool for the treatment of vague information” Inf. Sci. 172:1-2 (2005)
41-71
[5] H. J. Zimmermann, “Fuzzy Set and Its Applications, 3rd ed.” Kluwer Academic Publishers, Norwell, MA. (1996)
[6] Y.Y. Chen and T.C. Tsao, “A Description of the Dynamic
Behaviour of Fuzzy Systems”, IEEE Trans. 19 (1989)745-
755
[7] M. Sugeno Tanaka, “Successive Identification of a Fuzzy Modeand its Application to Prediction of a Complex System”, Fuzzy Sets Syst. 42 (1991)315-334
[8] M.Y. Hassan and F. Waleed Sharif, “Design of FPGA Based PID-like Fuzzy Controller for Industrial Applications”, IAENG, IJCS. 34:2 (2005)
[9] Shakowat Zaman Sarkar, “A proposed Air–conditioning systemusing Fuzzy Algorithm for Industrial Application” ICSE IEEE Proc. (2006) 832-834
[10] Shabiul Islam, Shakowat, ”Development of a Fuzzy Logic Controller Algorithm for Air-conditioning System”, ICSE2006Proc2006 IEEE
[11] M. Saleem Khan and Khaled Benkrid, “Multi- Dimensional Supervisory Fuzzy Logic Control DEV, Processing System forIndustrial Applications” Lecture Notes in Engineering and Computer Science vol. 2175, p.p. 1208-1217, Directory of Open Access Journals (DOAJ)
[12] M. Berthold, D. Hand, “Intelligent Data Analysis, 2nd ed.”, Springer-Verlag, Heidelberg (2006)
[13] M. Saleem Khan and Khaled Benkrid, “A proposed Grinding and Mixing System using Fuzzy Time Control Discrete Event Model for Industrial Application”, Lecture Notes in Engineering and Computer Science vol.
2175 2009, p.p. 1231-1236, Directory of Open Access Journals
(DOAJ)
[14] M. Saleem Khan and Khaled Benkrid, “Design of Liquids Mixing Control System using Fuzzy Time Control Discrete Event Model for Industrial Applications”, World Academy of Science, Engineering and Technology vol. 72
2010, p.p. 545-553, Directory of Open Access Journals
(DOAJ)
IJSER © 2011 http://www.ijser.org