International Journal of Scientific & Engineering Research, Volume 4, Issue 11, November-2013 214
ISSN 2229-5518
A LIGHT WEIGHT LOCATION VERIFICATION
PROTOCOL BASED ON BEHAVIOR LEARNING PROCESS FOR MOBILE ADHOC NETWORKS
T.Buvaneswari, Dr.A.Antony Iruthayaraj Research Scholar, Senior professor –Research Computer Science and Engineering,
Vinayaka Missions University, Salem. Aarupadai Veedu Institute of Technology, Paiyanoor
tbuvaneswari@yahoo.com, anto_irud@hotmail.com
Abstract— Fast changing and growing nature of mobile adhoc networks makes the accessibility of location aware services becoming difficult. W ith the presence of adversaries and attacking nodes, the location based service discovery becomes a challenging one. We propose a light weight location verification protocol for the verification of nodes which turns out to be a robust one and uses the behavior of nodes for the verification process. Here distributed one step Location Verification Protocol is being used and session based behavior learning process for the identification of adversary nodes has been adopted. The proposed method is indeed capable of preventing attack types such as node impersonation , Sybil, ddos attacks.
Index Terms— Neighbor Discovery, Location Verification, Location Based Services, vehicular networks
—————————— ——————————
1 INTRODUCTION
he growing internet technology makes the mobile user to access all major services irrespective of their location. Nowadays Location based services are attaining populari-
ty. For example in a road traffic network the mobile user can access few location based services to get know about the res- taurants , hotels, hospitals etc which are nearer to them. What- ever the service they need the result is provided based on their locations only so that the location based services become more popular and used by many users on need basis. Here the focus is on mobile adhoc network where there are no standard to- pologies and neighbor nodes can serve as intermediate node and participate in routing process.
Location based services (LBS) has the ability to locate geographical position of the user to deliver area specific in- formation. LBS can provide useful information regarding pub- lic transportation, route options, weather forecasts, and loca- tion of hospitals, restaurants, police stations, tourist attrac- tions, landmarks, petrol pumps, ATMs etc. In a VANET traffic network the location based service can be accessed in many ways. The routing in VANET network becomes more compli- cated due to the increase in mobile nodes. A mobile node can access a service to know about the traffic and route to a de- sired destination by accessing the LBS. The LBS could send the knowledge about the traffic and possible set of routes to reach the destination. The mobile node could chose a path to reach destination. Alternatively, accessing the service need a request to be transferred, so that the neighboring nodes becomes par- ticipant in the transmission. In practice most of the times the neighbor node becomes adversary and introduces different kind of attacks, which in turn reduces the throughput rate of the network. Protocols for Neighborhood Discovery (ND) serve as fundamental building blocks in mobile wireless sys- tems. Clearly, ND enables (multi-hop) communication, as it is
essential for route discovery and data forwarding. ND can also support a wide range of system functionality: network access control, topology control, transmission scheduling, en- ergy-efficient communication, as well as physical access con- trol. Given the critical and multifaceted role of ND, its security and robustness must be ensured: ND protocols must identify the actual neighbors, even in hostile environments.
The location discovery of neighbor nodes and verifi- cation process becomes more complicated one, due to the in- crease in protocols of mobile adhoc networks. There are many protocols NPV, “Secure Probabilistic Location Verification in Randomly Deployed Wireless Sensor Networks” [1], “Secure and Precise Location Verification Using Distance Bounding and Simultaneous Multi lateration” [2] been addressed earlier for the verification of the mobile nodes location. Most of them
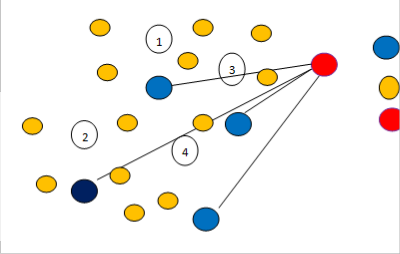
Fig1: Adversaries fake positions.
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 11, November-2013 215
ISSN 2229-5518
Fig1 shows that there are fake and adversary nodes and their positions. Yellow colored nodes are trusted ones, Red colored is the adversary node and blue colored is the false po- sition of the adversary node. It is clear that the adversary node generates fake position for every neighbor node of it and sends false misleading location information to its neighbors. This false location information affects the process of routing in the mobile adhoc network, because each neighbor participates in the routing for mobile adhoc network. When an adversary sends fake position to its neighbor, and the neighbor selects the fake node to transmit a message, then the packet or infor- mation will not be transferred to the destination exactly. The fake node could take all the messages from the source node and may generate collinear or jamming attack to degrade the network performance
2 RELATED WORKS
Here we discuss various methods proposed for the verifi- cation of nodes position and node discovery. Secure services for application and management messages have proposed in [3], it uses secure message formats, and the processing of those secure messages, within the Dedicated Short-Range Commu- nications (DSRC)/Wireless Access in Vehicular Environment (WAVE) system are defined. (Rewrite) The standard covers methods for securing WAVE management messages and ap- plication messages, with the exception of vehicle-originating safety messages. It also describes administrative functions necessary to support the core security functions.
For the discovery of mobile nodes [4], the author ex- plored the possible types of attacks in the physical and com- munication medium of the mobile adhoc networks. Neighbor discovery is classified into physical and communication neighbor discovery. Protocols aiming at communication ND, which are based on physical ND protocols, often fail to achieve their objective. This is because these two types of dis- covery are not equivalent. At the same time, protocols for communication ND do not fully address the problem at hand. They are effective only under very specific operational condi- tions or they do not ensure correctness in all cases.
For the verification of Neighbor position [5][6], there are methods was dealt in the context of ad hoc and sensor net- works; however, existing Neighbor Position Verification schemes often rely on fixed or mobile trustworthy nodes, which are assumed to be always available for the verification of the positions announced by third parties. In ad hoc envi- ronments, however, the pervasive presence of either infra- structure or neighbor nodes that can be aprioristically trusted is quite unrealistic.
For Secure Positioning in Wireless Networks [7], NPV protocol is proposed which calculate distances for all neigh- bors, and then commends that all triplets of nodes encircling a pair of other nodes act as verifiers of the pair’s positions. This scheme does not rely on trustworthy nodes, but it is designed for static sensor networks, and requires lengthy multi round computations involving several nodes that seek consensus on a common neighbor verification. Furthermore, the resilience of the protocol in to colluding attackers has not been demon-
strated. Static sensor networks [8] also require several nodes to exchange information on the signal emitted by the node whose location has to be verified. Moreover, it aims at as- sessing only whether the nodes are within a given region or not.
An Improved Security in Geographic Ad Hoc Routing throuh Autonomous Position Verification is discussed in [9]. The au- thors proposed an NPV protocol that allows nodes to validate the position of their neighbors through local observations on- ly. This is performed by checking whether subsequent posi- tions announced by one neighbor could draw a movement over a time in realistic sense. The approach [10] forces a node to collect several data on its neighbor movements before a de- cision can be taken, making the solution unfit to situations where the location information is to be obtained and verified in a short time span. Moreover, an adversary can mislead the protocol by simply announcing false positions that follow a realistic mobility pattern.
The scheme in Secure Location Verification for Vehic- ular Ad-Hoc Networks [8] exploits Time-of-Flight (ToF) dis- tance bounding and node cooperation to mitigate the prob- lems of the previous solutions. The cooperation is limited to couples of neighbor nodes, which renders the protocol ineffec- tive against colluding attackers.
To the problems identified, there must be a protocol
which is fully distributed and light weight to solve the verifi-
cation of node position in mobile adhoc networks. It should
not depend on trusted nodes and should be secure for various
kinds of attacks.

3 OVERVIEW OF LIGHT WEIGHT LOCATION
VERIFICATION SYSTEM
The proposed system verifies the node location using one step verification process utilizing session based behavior learning process. The node in the network receives their geo- metric and spatial metrics at the time of registration or enter- ing in to the coverage of the base station. The nodes specify the location information and speed and displacement details at all time. At each time stamp the base station sends the noti- fication to collect nodes behavior details. Upon receiving this message for certain time, if a node transmits a message it sends node and packet and forwarding node details to the base station. The base station maintains node details under its coverage and behavior matrix where it stores the transmission details of all nodes which could be used to identify the adver- sary nodes.
The proposed system has the following three phases. There are (i.)Registration, (ii.)Behavior Collection and (iii.)One step Location Verification.
3.1 Registration
When a mobile enters to a new coverage area, it needs to regis- ter in the base station about its latitude and longitude. The login message has the following parameters.
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 11, November-2013 216
ISSN 2229-5518
Message Id | Node Id | Location Details | Time Stamp(entry time) | Speed |
Table1: Login Message format

In the login message it has Message-Id which is unique for the message sent by the node, Node-Id specifies the identification number of the node which sent the message, Location Details specifies the geometric location information and Time Stamp specifies that at what time the message generated and Speed e is
e it
ain-
key sent vate
Figure2: Registration process with the base station
Algorithm:
Step1: start
Step2: Generate Node-ID nid.
Step3: Generate Message-ID mid.
Step4: compute Geometric metrics location values Gx , Gy .(Latitude/longitude?)
Step5: generate entry time stamp mt.
Step6: compute speed ns =Ø ((( Gx -Gx-1 )* ( Gx -Gx-1 ))+( ( Gy -Gy-
1 )* ( Gy -Gy-1 )))/sec.
Step7: construct Login message Lm =nid+mid+(Gx, Gy )+mt +ns . Step8: stop.
The base station maintains the following details in the node matrix.
MessID | NodeId | Location Details | Time Stamp | Speed |
M1 | N1 | 120,130 | 01.23.45.900 | 5m/sec |
… | … | … | … | …. |
… | … | … | … | … |
… | … | … | … | … |
Table2: Base station node matrix
The node details are stored in the node matrix only if the node registers the base station at the time of handover process. So that the nodes location can be calculated using those pa- rameters in the login message by the mobile base station at any point of time
3.2 Registration

The base station initiates Behavior Collection procedure periodically with specific time interval. Upon receiving this message each node either receives or transmits a message. It generates another control message which has the packet id received or transmitted, and node id from which it receives and also where to it transmits time stamp etc… The base sta- tion collects this information and updates the behavior matrix periodically. This procedure will be repeated periodically and the update time is set depend on the nodes movement to ana-
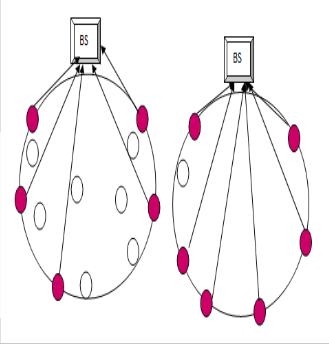
Figure3: Transmission of behavior message
From the figure 3 it is very clear that if the source 6 se- lects the path through 2 to reach 4 , then the base station re- ceives the behavior message completely. The base station at every time slot analyses the behavior matrix and search for the completion of transmission with the packet id and source and destination id specified in the matrix. If the transmission is incomplete then it identifies the fake node with link and ad- versary node from the matrix and packet details. It updates all
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 11, November-2013 217
ISSN 2229-5518
identified adversary details and records in adversary matrix.
It is normally difficult to say a node as an adversary
node with one single transmission. Sometimes the mobility of
the node also can be the reason for incomplete transmission,
because the node might have moved to some other location
which is computed by the source node at the time of route
selection. Here the behavior of adversary node helps us , by
giving false locations to more than one neighbor, so that the
adversary node could be identified by the base station by
identifying the same node id present in various transmission
which is incomplete from the behavior matrix stored in the

base station.
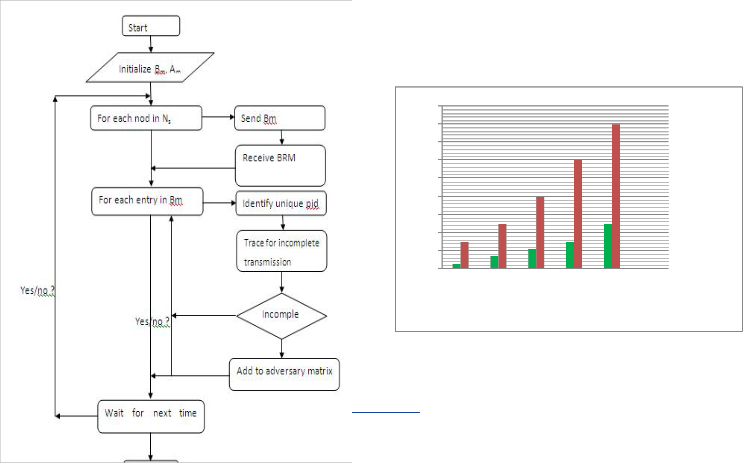
Algorithm:
Step1: initialize behavior matrix Bm and adversary matrix Am,
initialize time stamp Bt.
Step2: for each node Mni from the Node set Ns .
Send Behavior message BM.
Receive reply BRM.
Extract packet id (Pid), source id (Sid), destination id
(Did) ,NodeId( Nid), Ts
Store in Bm.
End.
Step3: for each row in matrix Bm.
Identify unique packet id pid.
Search for the row for completion of transmission.
If( incomplete)
Add Nid in adversary matrix Am.
End.
Step4: wait for next time stamp and repeat step 3, 4 . Step5: end.
3.3 One step Location Verification
The mobile node initiates this verification process for each transmission. At the time of transmission it selects the path and the neighbors by broadcasting the message. On receiving a reply the source node collects the set of neighbors and up- dates its neighbor matrix. For every chosen path for destina- tion, the neighbors are verified using procedure as given in the flow chart (Refer Fig 4). It sends the verification message Vm to the base station with the location details and geometric met- ric which is sent by the neighbor. The base station extracts the neighbor details and its geometric metric and computes the new location for the mobile node using the details in the node matrix. The neighbor details are kept stored in the node matrix when it enters within the coverage of the base station, it uses the location details of the mobile node and speed to compute the displacement of the neighbor node. It compares the loca- tion details sent by the source node and calculated location, if the difference between them is within a tolerance then it iden- tify the neighbor as genuine node and also checks the entry of neighbor id in adversary matrix if the neighbor id is present in the adversary matrix they it assumes that the neighbor as ad- versary one. Based on the two comparison process it send re- ply as genuine node or adversary one for the source node to transmit the message to the neighbor in order to transmit the message else it discards the neighbor and select another neighbor to transmit. It repeats the verification process for all neighbors to transmit the message.
4 RESULTS AND DISCUSSION:
The proposed system produces very good results and we have tested with large number of nodes and large number of adversary nodes.
450
400
350
300
250
200
150
100
50
0
Transmission Range
Graph1: Displacement Allowed according to Range 1
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 11, November-2013 218
ISSN 2229-5518
The graph1 shows the result produced by the proposed sys- tem and the average displacement allowed with the proposed system according to the transmission range
8
6
Trans. Mobile Computing, vol. 7, no. 4, pp. 470-483, Apr. 2008.
[6] S. _Capkun and J.-P. Hubaux, “Secure Positioning in Wireless Net- works,” IEEE J. Selected Areas in Comm., vol. 24, no. 2, pp. 221-232, Feb. 2006.
[7] A. Vora and M. Nesterenko, “Secure Location Verification Using
Radio Broadcast,” IEEE Trans. Dependable and Secure Computing, vol. 3, no. 4, pp. 377-385, Oct.-Dec. 2006.
[8] T. Leinmu¨ ller, C. Maiho¨ fer, E. Schoch, and F. Kargl, “Improved
Security in Geographic Ad Hoc Routing through Autonomous Posi- tion Verification,” Proc. ACM Third Int’l Workshop Vehicular Ad Hoc Networks (VANET), Sept. 2006
4
2
0
Transmission
NPV OneStep
[9] J.-H. Song, V. Wong, and V. Leung, “Secure Location Verification for
Vehicular Ad-Hoc Networks,” Proc. IEEE Globecom, Dec. 2008.
[10] Radha Poovendran and Loukas Lazos. A graph theoretic framework
for preventing the wormhole attack in wireless ad hoc networks.
volume 13, pages 27–59, Hingham, MA, USA, 2007.
[11] Lingxuan Hu and David Evans. Using directional antennas to pre-
vent wormhole attacks. In Symposium on Network and Distributed
Systems Security (NDSS), 2004.
[12] Kasper Bonne Rasmussen and Srdjan Cˇ apkun. Implications of radio
fingerprinting on the security of sensor networks. In International
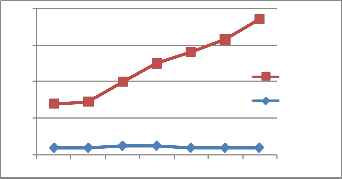
Figure 2: Traffic introduced by NPV and One step for verification pro-
cess
The graph2 shows the traffic introduced by NodePositionVeri- fication algorithm with our methodology. The results shows that our methodology introduces only little traffic compare to other systems.
5 CONCLUSION:
The proposed methodology is a secure one for all kind of attacks coming in mobile adhoc network. We used one step verification process, which is less time consuming and we collect behavior of the nodes periodically, so that even if there are many number of adversaries present in the network we could identify easily with the help of one step verification pro- cess. The behavior collection helps us to increase the perfor- mance and throughput of the overall network , because the forwarding node selection implies the performance of the overall system. Even though the behavior collection introduc- es little network overhead for 6%, it reduces the time of verifi- cation and heaviness of computing signature and using multi- ple keys for the identification and verification process, thus improves the efficiency of the overall network.
REFERENCES
[1] E. Ekici, S. Vural, J. McNair, and D. Al-Abri, “Secure Probabilistic Location Verification in Randomly Deployed Wireless Sensor Net- works,” Elsevier Ad Hoc Networks, vol. 6, no. 2, pp. 195-209, 2008.
[2] J. Chiang, J. Haas, and Y. Hu, “Secure and Precise Location Verifica- tion Using Distance Bounding and Simultaneous Multilateration,” Proc. Second ACM Conf. Wireless Network Security (WiSec), Mar.
2009.
[3] 1609.2-2006: IEEE Trial-Use Standard for Wireless Access in Vehicu-
lar Environments - Security Services for Applications and Manage- ment Messages, IEEE, 2006.
[4] P. Papadimitratos, M. Poturalski, P. Schaller, P. Lafourcade, D. Basin, S. _Capkun, and J.-P. Hubaux, “Secure Neighborhood Discovery:A Fundamental Element for Mobile Ad Hoc Networks,” IEEE Comm. Magazine, vol. 46, no. 2, pp. 132-139, Feb. 2008.
[5] S. _Capkun, K. Rasmussen, M. Cagalj, and M. Srivastava, “Secure
Location Verification with Hidden and Mobile Base Stations,” IEEE
Conference on Security and Privacy for Emerging Areas in Commu- nications Networks (SecureComm), 2007.
[13] Ritesh Maheshwari, Jie Gao, and Samir R. Das. Detecting wormhole
attacks in wireless networks using connectivity information. In IEEE Conference on Computer Communications INFOCOM, 2007.
[14] Levente Butty´an, L´aszl´o D´ora, and Istv´an Vajda. Statistical
wormhole detection in sensor networks. In Refik Molva, Gene Tsu- dik, and Dirk Westhoff, editors, ESAS, volume 3813 of Lecture Notes in Computer Science, pages 128–141. Springer, 2005.
[15] Weichao Wang and Bharat Bhargava. Visualization of wormholes in
sensor networks. In WiSe ’04: Proceedings of the 2004 ACM work- shop on Wireless security, pages 51–60, New York, NY, USA, 2004. ACM Press.
[16] Alessandro Armando, et. al. The AVISPA tool for the automated validation of internet security protocols and applications. In Proceed- ings of CAV’2005, LNCS 3576, pages 281–285. Springer-Verlag, 2005.
IJSER © 2013 http://www.ijser.org