International Journal of Scientific & Engineering Research, Volume 6, Issue 4, April-2015 1142
ISSN 2229-5518
The Digitalization of the Walking Stick for the Blind
Vandan Patel
Abstract: Blindness is a state of lacking the visual perception due to physiological or neurological factors. In this project, a simple intuitive blind navigation system is designed and implemented to improve the mobility and safety of blind people during their travels. The prototype includes a wearable glove to help the blind person to navigate alone safely and to avoid any obstacles that may be encountered, whether fixed or mobile, to prevent any possible accident. The main component of this system is the ultrasonic sensor which is used to scan a direction by emitting reflecting ultrasound waves. The reflected ping received from the obstacle is inputted to the microcontroller which is used to determine the distance of the object from the user. This distance then gets outputted by a vibrating motor which vibrates with more intensity as the obstacle gets closer. The current prototype is effective in terms of eliminating the use of a cane and also making it less embarrassing for the user to travel without being noticed.
Index terms: blind aid, digital walking stick, obstacle avoidance, obstacle detection, ultrasonic, vision glove, vibration response.
—————————— ——————————
1 INTRODUCTION
he most common use of navigation among the blind is the walking cane. For years it has been used but it is very obsolete. Not only is
it hard to navigate around in crowded places such as school hallways or city streets with a walking cane, but accidents are common and this shows it is unsafe as well as embarrassing to be used, mainly due to the size.
This project tries to address this need by replacing the walking cane with a digital solution that offers the same functionality, but makes it more intuitive and also much more portable and at the same time less visible.
2 BACKGROUND RESEARCH AND NEED
Every 5 seconds, somewhere, someone in the world goes blind. 20% of all blindness is not curable nor preventable. Around 7 million people in the United States are blind, 10% of those are between the ages of 4 and 20 and a further 10% of that age are registered at schools.
According to a study of 300 blind individuals by researchers at the University of Santa Cruz found that 13% of participants experienced head-level accidents at least once a month and 7 percent experienced falls while walking at least once a month. Further, they found that the use of a guide
————————————————
• Vandan Patel is currently a high school junior in USA.
E-mail: vp@vandan.me. Website: http://vandan.me/.
dog did not decrease the frequency of falls. Individuals in the study also expressed that they are less confident to travel due to accidents occurring. One of the leading causes of these accidents were unexpected obstacles and the second was the misjudgment of distances.
The research done in this project further backs that canes have the right function to assist the blind in navigation, but users feel less confident to travel due to the inconvenience and also the embarrassment. As well as this, the cane presents safety concerns for the user as well as the people nearby.
Companies and researchers have tried to address the need to digitize the cane, but all have done it to provide more information to the user, such as colour and the type of obstacle. All of the designs continue to employ the use of a long cane, which this project will eliminate the use of.
3 DESIGN CRITERIA
To correctly address the need and come up with an appropriate solution it is important to establish a set of design criteria which will assist in designing solutions.
1. The device must be small and not get in the way of movement.
2. The device must be intuitive to be usable by anyone, with or without the experience of using a walking stick to navigate.
IJSER © 2015 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 6, Issue 4, April-2015 1143
ISSN 2229-5518
3. The device must be able to identify and differentiate distances from an obstacle.
4. The device should not slow down the travel of the user compared to when using a walking stick.
4 PRELIMINARY DESIGNS
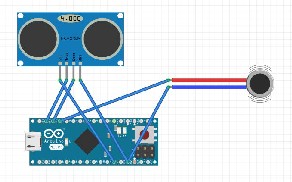
The initial design (Figure 1) of the device was deliberately made to be the most basic this way the device will be minimalistic and will not overwhelm the user with complex functions.
provide the time the ping took to travel from the module and to bounce back.
In order to process this information and to send an output a microcontroller is needed, in order to satisfy design criteria 1 the A-Star 32U4 Micro is used due to its tiny size of 1.5cm × 2.7cm × 0.45cm. The microcontroller will take the input and convert it to distance in centimetres by using the equation
𝑑𝑑𝑑𝑑𝑑𝑑𝑑𝑑 = 𝑑𝑠𝑑𝑑𝑑 × 𝑑𝑑𝑡𝑑 the speed in this case
being the speed of sound in cms-1 and the time
being the duration of the ping divided by 2 (going
there and back). Upon obtaining the distance the
microcontroller will then use an algorithm to control the intensity of vibration output depending on the distance. In specific, the distance of the object is inversely proportional to the vibration intensity, simply put, the closer the obstacle, and the more the intensity of the output vibration

(𝑣𝑑𝑑𝑣𝑣𝑑𝑑𝑑𝑣𝑑 𝛼 1 ).
𝑑𝑖𝑠𝑡𝑎𝑛𝑐𝑒
Figure 1 - Intial Design
Materials:
• 1 HC-SR04 Ultrasonic Distance Sensor
• 1 A-Star 32U4 Micro Microcontroller
• 1 Vibrating Motor
• 1 5V Portable Battery Pack
The basic idea was to design a device that can be strapped to the outside of the hand and the user can point it around to find the distance from their hand to next obstacle in the direction they are pointing in, the user will then feel a vibration which has different intensities depending on the distance of the obstacle. This way the device functions like a digital cane/waking stick.
The cane acts as a way for the user to be able to detect obstacles, this property will be referred to as obstacle detection. In order to satisfy design criteria 3 the obstacle detection mechanism must be able to measure distances. In order to achieve this the HC-SR04 ultrasonic distance sensor module will be used. The HC-SR04 is a sonar based sensor that uses ultrasound to send a ping and then if this ping hits an obstacle within its ping range of 4 metres it will bounce back and the module will
The vibrating motor is connected to pin 9 on the microcontroller, pin 9 has Pulse-width modulation (PWM) functionality meaning you can vary the voltage output that way you can control the intensity of the vibrating motor to produce different intensities allowing the user to differentiate between different distances.
To begin with, 4 distance intervals and their respective intensities are set:
Distance (m) | Intensity of output (0- 255) |
Less than 1m | 255 |
More than 1m but less than 2m | 205 |
More than 2m but less than 3m | 153 |
More than 3m | 102 |
5 Results
After the initial prototype was working, testing was done in order to see if objects were recognized (obstacle detection), in which the prototype was
100% responsive.
Next objects were set up inside the 4 different distance intervals to test if the vibrations were at the correct intensively. In this test a computer was used to see the exact cm value recognized by the prototype and then this data was put on a table with the intensity of output the prototype gave
IJSER © 2015 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 6, Issue 4, April-2015 1144
ISSN 2229-5518
according to the computer (this is not based upon a human test). 100 trials were done on 3 different days and the average of all the data collected from each .trial of each test is shown.
Test 1: Actual distance compared to the distance measured by the prototype
Actual distance (cm) | Distance measured by device (cm) | Intensity of output (0-255) |
10 | 9 | 10 | 10 | 255 | 255 | 255 |
110 | 112 | 110 | 110 | 205 | 205 | 205 |
250 | 245 | 249 | 250 | 153 | 153 | 153 |
380 | 350 | 375 | 378 | 102 | 102 | 102 |
The final test was to see if a human could tell the difference in distance between the objects with their eyes closed and only judge from the intensity (4/strong – 1/weak) of the vibrations felt on their hands.
Test 2: Intensity of output by device compared to the intensity felt by the human user
Actual distance (cm) | Intensity of output (0-255) | Feeling of intensity (1-4) |
10 | 255 | 255 | 255 | 4 | 4 | 4 |
110 | 205 | 205 | 205 | 4 | 3 | 2 |
250 | 153 | 153 | 153 | 3 | 2 | 2 |
380 | 102 | 102 | 102 | 1 | 1 | 1 |
6 Data Analysis and Discussion
From testing done on the prototype it was possible to see that in theory the design functions perfectly, in that, it achieves the goal of accurately estimating distances at the same time be correct in terms of the human differentiation of the distance intervals set at this point. Test 1 shows that the device can differentiate distances with a maximum of 30 cm error which for a device in this case is really effective.
But the problem (seen in Test 2) now seems to be how the device can relay the output better to the user so that the user can differentiate distances at the same level as the device. A possible solution to explore in further design is the addition of a second vibrating motor so that the vibration is amplified in order to give stronger feeling of the
intensively so that the human can tell the difference.
But furthermore, the distance intervals set at this point are somewhat vague and so it is important to have a smaller interval such as having a different vibration intensively every 30-50cm, but this again can raise the problem from Test 2 where the wider range of intensities will not be felt by the human user. So this calls for a different output method such as an audio based system where the distance is read out to the user but this can also raise more issues such as slowing down the speed of the user’s movement.
It is also important to work with the target user group, which in this case is the blind, and have user trials where proposed users test and provide their feedback on the prototype, this way the prototype can be further developed into an error- less product ready for release into the consumer market.
7 Conclusion
In conclusion and on reflecting back to the initial design criteria, the prototype satisfies design criteria 1, 2 and 4. Although 3 is somewhat satisfied, the prototype can be further developed so that it provides a more distinct output to the user. But it is impressive that the preliminary design has been able to fully satisfy most of the initial criteria set-up and this shows that the design is not only effective but on the right track to address the need it set out to fulfil. Also it is necessary to test the product more in a real world situation with real user from the target group.
REFERENCES
[1] National Federation of the Blind. (2014) Blindness Statistics. Available at: https://nfb.org/blindness-statistics (Accessed
01 December 2014)
[2] National Eye Institute. (2012) Blindness, Statistics and Data [NEI]. Available at: http://www.nei.nih.gov/eyedata/blind.asp (Accessed 02 December 2014)
[3] Manduchi, R, Kurniawan, S. (2011) ‘Mobility- Related Accidents Experienced by People with Visual Impairment’. Insight: Research and
IJSER © 2015 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 6, Issue 4, April-2015 1145
ISSN 2229-5518
Practice in Visual Impairment and Blindness,
4(2): 44-54.
[4] Johann Borenstein and Yoram Koren, The Guide Cane –A computerized Travel aid for the Active Guidance for the Blind Pedestrians, proceedings of the IEEE international conference on Robotics and Automation, Albuquerque, 1997, page 1283-1288.
[5] C. Gearhart, A. Herold, B. Self, C. Birdsong, L.
Slivovsky, Use of ultrasonic sensors in the
development of an Electronic Travel Aid,
Sensors Applications Symposium, 2009, SAS
2009, IEEE, pp.275-280.
[6] Shang Wenqin; Jiang Wei; Chu Jian; A machine vision based navigation system for the blind China Computer Science and Automation Engineering (CSAE), 2011 IEEE International Conference on 10-12 June 2011.
[7] Hashino, S.; Ghurchian, R.; A blind guidance system for street crossings based on ultrasonic sensors. Information and Automation (ICIA),
2010 IEEE International Conference on June
2010
[8] F. Gaunet and X. Briffault, “Exploring the functional specifications of a localized way finding verbal aid for blind pedestrians: simple and structured urban areas," Human Computer Interaction, vol. 20, no. 3, pp. 267-
314, 2005.
[9] J. M. Loomis, J. R. Marston, R. G. Golledge, and R. L. Klatzky, “Personal guidance system for people with visual impairment: A comparison of spatial displays for route guidance," Journal of Visual Impairment and Blindness, no. 99, pp. 219-232, 2005.
[10] J. M. Benjamine, N. A Ali and A. F. Schepis, a laser cane for the blind, proceeding of the San Diego
[11] Biomedical Symposium, 1973, Vol. 12, pp 53-
57.
IJSER © 2015 http://www.ijser.org