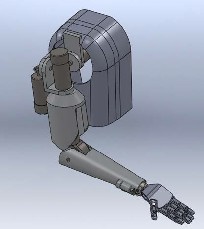
Fig. 1 Modular Robotic arm with multi finger hand having
3 Dof at shoulder, 1 Dof at Elbow and 3 Dof at Wrist.
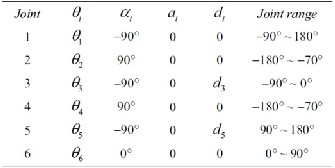
sliding joint variable di, joint offset distance ai, and the angle
between the two neighboring z axes αi [9].
International Journal of Scientific & Engineering Research, Volume 4, Issue 12, December-2013 1390
ISSN 2229-5518
Modular Design and Control of Humanoid Robot
Arm
Kapse S.S., Kapse S.K.
humanoid robot arm extended more flexibility and variety in use of arm.The modular arm resembles actual human arm in movement and appearance, is built using PMDC motors, gear trams, breaks and motor drives. The modular design of humanoid arm is having 7-Dof similar to human arm. The mechanical modular design made it sufficiently small and compact compared to currently available Humanoid robot arm. The developed arm is controlled using the PIC 18F4580 microcontroller. The multi finger gripper is capable of grasping any shape object very precisely. For getting the amount of force applied on object while grasping, flexi force sensor strip is attached to each finger in contrast to previously used pressure pads. The developed modular arm is more suitable for human interactive task. Arm is composed of links and modular joints so that arm can handle 3kg payload even with full arm extension.
—————————— ——————————
fast robotic arm developed by University of Tokyo has very
Robotic arms are widely used in industrial automation for
high bandwidth for grasping object [6]. The reason behind the
IJSEfast operation ofRarm is artificial muscle actuator.
material handling tasks.These arms cannot be used in daily life because the motions they serve are restricted by their structure. In order to behave in anthropomorphic way the humanoid robots should have modular design and efficient degree of freedom so that they can mimic human motions. Further to perform motions like human arm the robotic arm should have 7-Dof and the 5 to 24 Dof for hand.
NASA’s Robonaut humanoid robot comes with total of 19- Dof, particularly 5-Dof for arm and 14-Dof for hand. It has sensing abilities; can perform fine motions, included redun- dancy and safety features [2]. Robonant’s hand is explicitly developed for EVA [3]. The first articulated hand with com- plete integration of electronics and actuators is DLR hand I. It included 6-Dof newly designed force sensors and hence sim- ple communication architecture [1]. The vision sensing based,
————————————————
• Kapse Swapnil is currently pursuing masters degree program in mecha- tronics engineering in College of Engineering Pune, India, PH-
918888889491. E-mail: kapse.s.s@gmail.com
• Kapse Shivdas is currently pursuing doctorate in Physics in Dr.BAMU
University, India, PH-919422206625. E-mail: kapse.sk@gmail.com
The developed modular design is having 7-Dof for arm and 8-
Dof for multi finger gripper hand. The arm together with hand is capable of sensing force applied by hand on object while grasping. These arms can be used for grasping even delicate material such as glass.
The modeled structure of arm has 7-Dof from shoulder to wrist. It helps to perform fine motions just like human arm. In shoulder three motors are placed in such way that shoulder can moves in 3-Dof.The elbow moves in 1-Dof and wrist in 3-Dof. The design is compact hence the application need harmonic drives which give large gear ratio with very small size and it helps to reduce the backlash. The shoulder provides free movements 270 pitch, 120 yaw and 180 roll. While elbow provides 90 pitch motion. The wrist is somewhat difficult to design as the size of wrist is very compact. Wrist provides 180 roll, 180 pitch and 120 yaw capability to hand. For ease in electrical
wiring the joint centers are made hollow.
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 12, December-2013 1391
ISSN 2229-5518
Fig. 1 Modular Robotic arm with multi finger hand having
3 Dof at shoulder, 1 Dof at Elbow and 3 Dof at Wrist.
sliding joint variable di, joint offset distance ai, and the angle
between the two neighboring z axes αi [9].
TABLE 1
COMPARISON BETW EEN MODULAR ARM AND HUMAN ARM
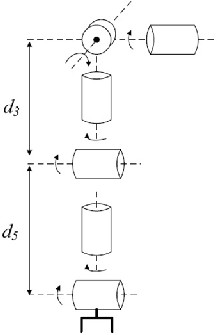
IJSEFig. 2 Kinematic Rmodel for Arm helps to get the trajectory.
Kinematics is very important aspect in robotics for finding position of joint at end effect. Analytical solution can be classified into different geometry based closed loop solutions. For less than 7- Dof the closed loop solution can be obtained easily [8].
The general structure of robot is highly dependent on the utili- ty and the purpose for which they are built. A robotic arm with 7 Dof shows have potential because, it can perform the motion that mimic most of human hand motions. The kine- matic structure of robotic arm is shown in fig 2.
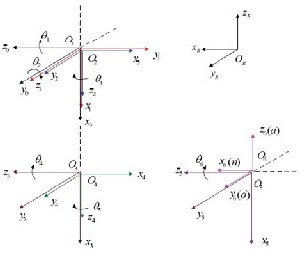
A D-H coordinate system of the humanoid robot arm is found in Fig 3. The parameters of link are shown in Table 2.Where the four parameters are respectively the rotary joint angle θi,
Fig. 3 DH Coordinate system for calculating DH parameters. For humanoid robot arm, each joint must be compact in struc-
ture with high accuracy and necessary torque for actuator [11]. By calculating torque required, PMDC servomotor is used for each degree of freedom. For controlling the 7 motors at a time PIC 18F4580 microcontroller is used having CCP/ECCP mod-
ule for DC motor control.
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 12, December-2013 1392
ISSN 2229-5518
The advantage of CCP/ECCP module is, using library files the motors can be controlled easily without disturbing the PIC processor; hence the speed of communication is increased by interfacing through RS232 interface.
TABLE 2
DH PARAMETERS OF THE ARM
[4] T Asfour, K. Regenstein, P. Azad, J. Schr¨oder, A. Bierbaum, N. Vahrenkamp and R. DillmannUniversity of Karlsruhe,”ARMAR-III: An Integrated Hu- manoid Platform for Sensory-Motor Control”IEEE International Conference on Robotics and Automation, Leuven, Belgium, 2006.
[5] G Hirzinger, Sporer N, Albu-Schaffer A, Hahnle M, Krenn R, Pascucci A, Schedl M. DLR’s torque-controlled light weightrobot III: Are we reaching the technological limits now?. Proceedings of IEEE International Conference on Robotics & Automation, Washington DC, USA, 2002, 1710–1716.
[6] E Garcia, M. A. Jimenez, P. G. De Santos, et al, “The evolution of robotics research,” IEEE Robotics & Automation Magazine, vol. 14, no. 1, pp. 90-103, Mar. 2007.
[7] T Kanda, H. Ishiguro, M. Imai, et al, “Development and evaluation of interac- tive humanoid robots,” Proceedings of the IEEE, 2004, vol. 92, no. 11, pp. 1839-
1850, Nov. 2004.
[8] J M Hollerbach., “Optimum Kinematic Design for a Six Degree of Freedom
Manipulator”, 2“d Int. Symp. Robotics Research, Kyoto, Japan, Aug. 20-23,
1984, pp. 215-222.
[9] H Seraji, ‘Configuration Control of Redundant Manipulators: Theory and
Implementation”, IEEE Trans. Robotics and Automation, Vol. 5, No. 4, pp.
472-490, 1989.
[10] Wang XimingGao Wei, “Research on the Control ofDC Servo Motor by Mi- croprocessor” Sci. Tech Engng,China, Vol.7 No.14 July 2007.
[11] Liang Feng, Wang Zhiliang, Xielun, “The Applicationof Multi-servo control
on Humanoid Robot”RobotTechnology, China, Vol 24, 2008.
IJSER
There are total 7Dof servomotors drivers for driving each mo-
tor, consisting PIC18F4580 micro controller. The L2980chip is used as motor driver having an internally H- bridge circuit to drive DC servomotor and provides required current flow.
This paper presents a robotic arm with 7Dof with modular wrist for interactive humanoid applications. The mechanical design is compact and modular so by attaching pneumatic suction cup or multifinger gripper arm at wrist end, applica- tions such as assistance to physically handicapped persons.By adding the visual algorithm to give environmental infor- mation, useful for obstacle avoidance.
[1] J Butterfass, Hirzinger G., Meusel P, Liu H. DLR’s Multisensoryarticulated hand, Part II: Parallel torque/position control system. Proceedings of IEEE In- ternational Conference on Robotics and Automation, Leuven, Belgium, 1998,
2087–2093.
[2] R O Ambrose, Aldridge H, Askew R S, Burridge R R, Bluethmann W, Diftler M, Lovchik C, Magruder, D, Rehnmark F. Robonaut: NASA’s space human- oid. IEEE Intelligent Systems, 2000, 15, 57–63.
[3] Lovchik C, H. Aldridge, and M. Diftler,“Design of the NASA Robonaut
Hand,” Proc.ASME Dynamics and Control Division, DSCVol.67,Amer. Soc. of Mechanical Engineers, New York, 1999, pp. 813–830.
[12] Shi Wei, “DC Reduction Servo Motor Control by PWM of Microprocessor”
Nowadays Electronic, China, Oct, 2005.
IJSER © 2013 http://www.ijser.org