neering and technology Peshawar, Pakistan , E-mail: sahibzada.mahmud@nwfpuet.edu.pk
Now here in this picture driver can not see what is in front of that bus.?

Similarly on foggy days

International Journal of Scientific & Engineering Research, Volume 4, Issue 4, April-2013 359
ISSN 2229-5518
Inter-vehicle Collision Avoidance Using
Zigbee Sensor Networks
Umair Ali Khan*, Dr Sahibzada Ali Mehmud, Mustafa Basit
Abstract— This research paper presents a system for vehicles collision avoidance using zigbee sensors. The system developed provides timely safety information for drivers who do not have any idea of happening collision. This system calculates the distance covered by vehicle from the moment brakes are applied till it stops and the time taken by it, at variable speeds. W ith zigbee sensors it gives the warning to the driver in case of getting in to the proximity of other vehicle and removes any possible chance of the collision. This will help the drivers in maintaining a safe distance from other vehicles moving in front of them and will save them from the collision
Index Terms— intervehicle, collision avoidance, zigbee sensors, vehicle driving, traffic control, wireless networks, accidents, safety driving support.
1 INTRODUCTION
—————————— ——————————
RAFFIC accidents have been taking hundreds of lives each year, which is quite a big number for human deaths
from vehicular accidents than deadly diseases or natural disasters.
About 60% roadway collisions could be avoided if the opera- tor of the vehicle was provided warning one-half second be- fore the collision.[1]
Human drivers suffer because of there limitations in there abilities like observing, noticing or watching an event on roadway emergency, resulting in large time delay in spread- ing the emergency warnings, as it is described in the following simplified example
Now as its shown in Figure 1, three vehicles, let say we have three vehicles vehicle 1, vehicle 2 and vehicle 3 traveling in a same lane. When vehicle 1 suddenly notices an emergency event it applies its brakes abruptly, both vehicles vehicle 2 and vehicle 3 are in danger because of there less distance from the vehicle 1, and being even further away from vehicle one does not make vehicle 3 any safer than vehicle 2 due to the follow- ing two reasons:
Line of sight limitation of brake light:
Typically a person driving a car only sees the brake light from the vehicle directly
in front to that vehicle. Thus, very likely vehicle 3 will not know the emergency at vehicle 1 until vehicle 2 brakes.
————————————————
Umair Ali Khan, B.Sc electrical engineering,KPK Universityof engineering and technology peshawar, Pakistan, PH-0966851111,
DR Sahibzada Ali Mehmud , Asistant professor KPK University of engi-
![]()
neering and technology Peshawar, Pakistan , E-mail: sahibzada.mahmud@nwfpuet.edu.pk
Now here in this picture driver can not see what is in front of that bus.?
Similarly on foggy days
IJSER ©
International Journal of Scientific & Engineering Research, Volume 4, Issue 4, April-2013 360
ISSN 2229-5518

And on rainy days 
Fig 1 : Three vehicles moving on the road
Communications between vehicles increase the safety and efficiency level of future transportation systems. Experiments and observations by different authors shows that v2v commu- nication helps alot in the safety and ease in the traffic flow [3]
Now the system we designed here does the following jobs
• The system measures the distance covered between
the instant, the brakes are applied till the vehicle
stops, moving at variable speeds.
Whats behind the bend
Large processing/forwarding delay for emergency events:
Driver reaction time, i.e., from noticing the brake
light of vehicle 1 to stepping on the brake for the driver of ve-
hicle 2 . it generally ranges from 0.7 seconds to 1.5
seconds [2], which results in a much large delay in spreading
the emergency event warning .![]() Car A
Car A ![]() Car B
Car B![]()
Car C
• The time elapsed after applying the brakes till it stops.
• The zigbee sensor measures the distance between the vehicle in front of the car and will warn the vehicle in case there are any chances of collision.
And it will help in
• Easy traffic movement on the busy roads.
• Emergency Braking of vehicle moving in front.
• Reduces the number of accidents in case of emergen-
cy warnings delay.
• Supporting large number of vehicles on the road.
• Improve the work in the field of vehicle to vehicle
communication.
Well there is excess of studies which considers the exchange of information related to safety of the vehicles between the vehi- cles [4, 5]. Haas et all developed a simulation environment capable of being easily expanded or easily upgraded that showed the stimulations of the crashes happening actually and addressed the requirements of communication to be safe from the crashes [6].According to us the first paper that stud- ied the communication requirements for the safety of the vehi- cles [7]. Use of DSRC is very helpful in collision avoidance of vehicles it provides usually a range of 1 km and allows the exchange of information between vehicles moving upto the speed of 160 km/hour [8].
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 4, April-2013 361
ISSN 2229-5518
Hardware used in this project consists of the following parts:
Step down transformer (I/P 230v AC O/P 12 AC)
Fullwave bridge rectifier (4 IN4007 diodes)
B10K potentiometer
Voltage regulators using C1815, D313, L789CV,L785CV Transistors
Permanent magnet DC motor
CD 4026BE decade counter
NE 555P Timer
Magnetic Pulse Sensor
Relay
PIC Microcontroller
Zigbee sensor
Softwares which have been used in this project are
Keil version 2 for creating HEX files
Proteus is used for microcontroller simulation.
Live wire is also used for simulation.
PCB is used for connecting electronic components and to view the current and voltage flow among different components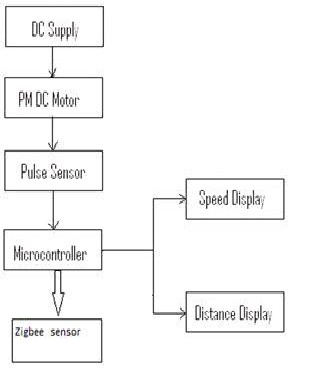
Fig 2: showing the over all procedure and working for the sys- tem.
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 4, April-2013 362
ISSN 2229-5518
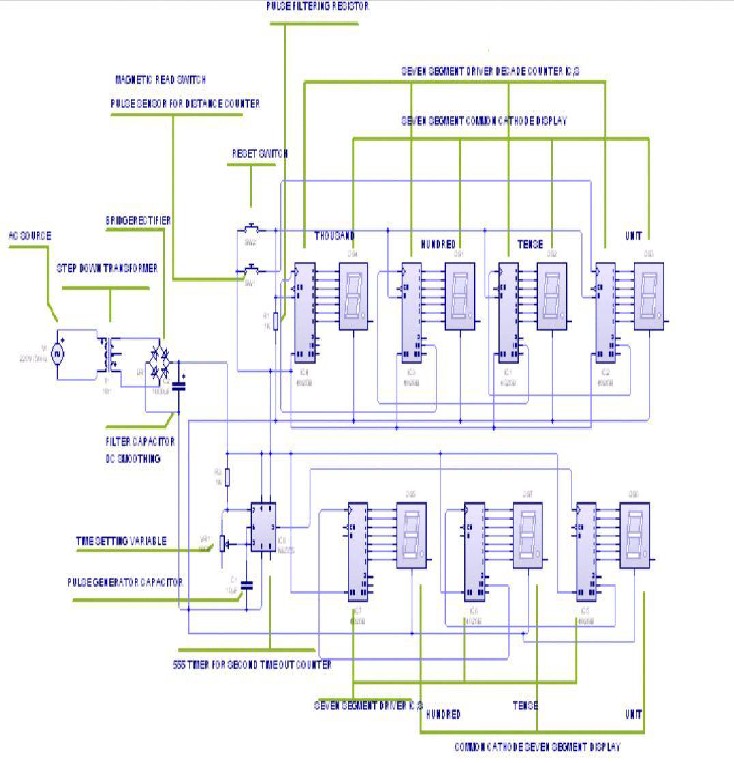
6 Simulation for calculation of time and distance after applying brakes
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 4, April-2013 363
ISSN 2229-5518
7 Simulation for PIC microcontroller interfaced with key- pad and LCD:
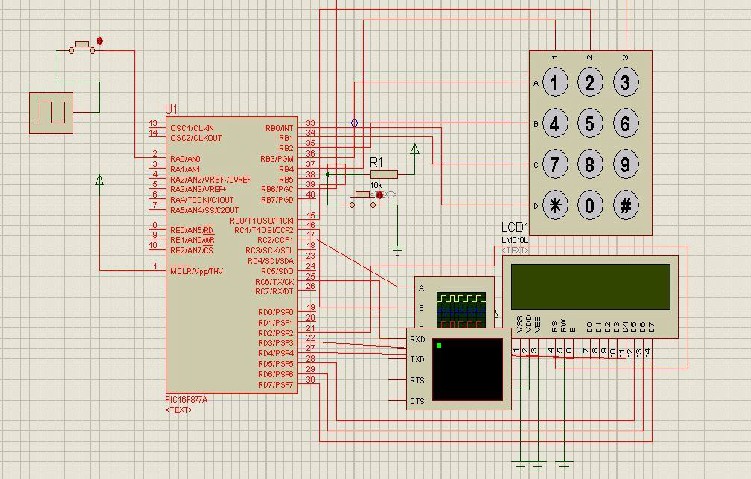
Fig 4: simulation for pic microcontroller working
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 4, April-2013 364
ISSN 2229-5518
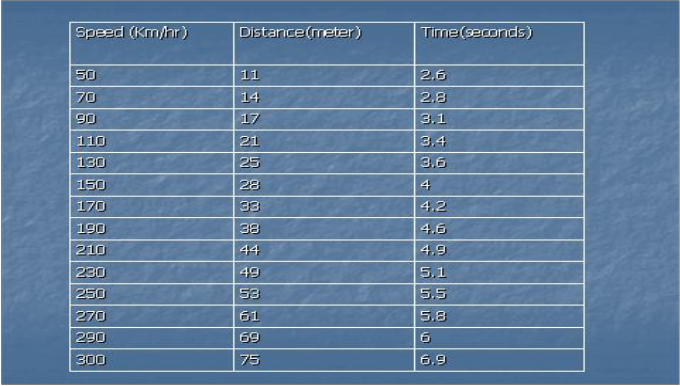
8 Performance evaluation
The performance of the system is checked at 14 different sce- narios
Results are as following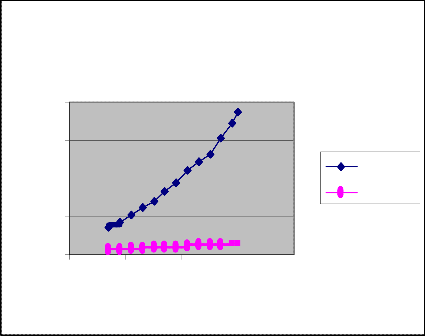
80
60
distance
40
time
20
0
0 100 200 300 400
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 4, April-2013 365
ISSN 2229-5518
9 Conclusion
Hence usage of this system can highly increase safety and effi- ciency of transportation system. While improvements in this system can bring out the more reliability and safety in the ve- hicular communication filed.
References:
[1] C. D. Wang and J. P.Thompson.Apparatus and method for motion detection and
tracking of objects in a region for collision avoidance uti- lizing a real-time adaptive
probabilistic neural network, 1997. US.Patent No.
5,613,039
[ 2] M. Green. “How Long Does It Take to Stop?”. Methodo- logical Analysis of Drive
Perception-Brake Times. Transportation Human Factors,
2(3):195–216, 2000
[3] M.Nekoui,H.Pishro-Nik,and D.Ni,“ The effect of Intel-
lidrive on the efficiency of
high way transportation systems,” International Journal
of Vehicular Technology,
vol.2011.ArticleID653542
[4] D.Jiang,V.Taliwal,A.Meier, and W.Holfelder,“Design Of
5.9 Ghz DSRC-based
vehicular safety communication,” IEEE Wireless Com-
munications, vol.13, pp.
36– 43, October2006.
[5] Q.Xu,T.Mak,J.Ko, and R.Sengupta, “Vehicle-to-Vehicle
safety messaging DSRC,”
in Proceedings of the1st ACM international workshop on
Vehicular adhoc
Networks, Philadelphia, U.S.A,pp.19–28,2004.
[6] J.J.HaasandY.-C.Hu, “Communication requirements for
crash avoidance, ” in
Proceedings of the seventh ACM International workshop
on Vehicular
Internetworking,VANET’10,pp.1–10,ACM,2010.
[7] M.Nekovee, “Quantifying performance requirements of
Vehicle-to-vehicle
communication protocols for rear-end collision avoidance,
” in VTC
Spring2009.,pp.1–5,2009.
[8] P. Fernandes, U. Nunes, “Vehicle Communications A
Short Survey,”
IADIS Telecommunications, Networks and Systems, Lis-
bon, 2007, pp.
134-138.
IJSER © 2013 http://www.ijser.org