International Journal of Scientific & Engineering Research, Volume 3, Issue 11, November-2012 1
ISSN 2229-5518
IMPLEMEMTATION OF MOVING OBJECT TRACKING AND
DETERMINATION OF VELOCITY USING DSK
K.Sirisha Assoc.prof , Dr. Ramesh Patnaik
Abstract-This paper deals with the tracking and following of moving object in a sequence of frames and the velocity of the object is determined by using efficient algorithms. Algorithms are developed for improving the image quality, segmentation, feature extraction and for determing the velocity. The developed algorithms are implemented on TMS320C6416T DSP Starter Kit (DSK). Segmentation is performed to detect the object after reducing the noise from that scene. The object is tracked by plotting a rectangular bounding box around it in each frame. The velocity of the object is determined by calculating the distance that the object moved in a sequence of frames with respect to the frame rate that the video is recorded. The algorithms developed can also be used for other
applications (real time, tracking of moving objects, etc.).
1. Introduction:
This paper deals with the single object tracking and velocity of that object. The
(DSK).The motivation behind this project is to develop software for tracking, the major application in security, surveillance and vision analysis. The developed software must be capable of tracking any single object moving in the frame and to implement on a hardware which is capable of on board calculations with high performance and low power consumption. This system might be useful for extending in real-time surveillance or object classification. The main objective of this paper is to develop an algorithm for tracking of an
object and determining the velocity of
moving object in sequence of frames. All the evaluation has to be performed on TMS320C6416T DSP starter Kit (DSK), which is capable of doing onboard calculations. It has features like internal memory and external memory on board to store instructions and doing evaluation on board. It has special functions for handling graphics up to ten-times faster than other processors and it offers more precision when compared to others, since it is using floating-point format. Algorithms can be extended for real time applications.
2. Object Tracking:
Object tracking is the process of locating or tracking by following the moving object in sequence of video frames. Smart cameras are used as input sensors
to record video. The recorded video may
IJSER © 2012 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 3, Issue 11, November-2012 2
ISSN 2229-5518
have some noise due to bad weather (light, wind, etc. or due to problems sensors).Few algorithms are tested to improve the image quality, to detect moving object, calculation of distance and velocity of the moving object.
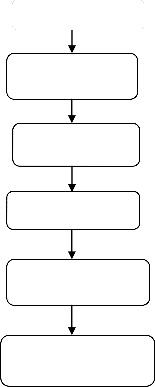
Video input
Pre-processing Noise Removal Segmentation Feature Extraction
Determination of velocity
Fig.1. procedure for object tracking and velocity determination
Single object tracking can be explained clearly in the above fig.1.and the process involves the following steps:
2.1 Pre-processing:
The pre-processing performs some steps to improve the image quality. Few algorithms are explained and filtering is done by using
box-filter techniques.
Box functionality: If we take an image with X*Y resolution, the pixels starting from2nd row 2nd column to X-1 row Y-1 column are scanned with all the neighbouring elements, they form a shape like box.
2.2 Noise Removal:
Mean Filter:
Mean filter is the simplest type of low pass filter to remove noise. The noise is removed using the box functionality, which scans the whole image.
Gaussian Smoothing:
Gaussian smoothing operator is used to blur images and remove noise. Gaussian smoothing has the similarity of mean filter, but uses a different function to calculate the pixel value.
Median Filter:
The median filter is a classical noise removal filter. Noise is removed by calculating the median from all its box elements and stores the value to the central element.
2.3 Segmentation:
Segmentation is the process of dividing digital image into multiple regions. Segmentation shows the objects and boundaries in an image. Each Pixel in the region has some similar characteristics like color, intensity, etc.
IJSER © 2012 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 3, Issue 11, November-2012 3
ISSN 2229-5518
2.4 Feature Extraction:
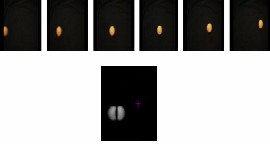
Feature Extraction plays a major role to detect the moving objects in sequence of frames. Every object has a specific feature like color or shape. In a sequence of frames, any one of the feature is used to detect the objects in the frame. Here it is shown in the fig.2 frame difference between two frames by reference frame.
Fig.2.Frame difference between 2 frames
2.5 Distance:
The distance travelled by the object is determined by using the centroid. It is calculated by using the Euclidean distance formula. Euclidean distance is the shortest distance between two points. The variables for this are the pixel positions of the moving object at initial frame to the final frame. The distance can be calculated by using formula: Distance=

Where X1=previous pixel position and X2=present pixel position in width Y1=previous pixel position and Y2=present
pixel position in height.
2.6 Determination of velocity: Velocity of moving object is determined using the distance travelled by the centroid to the frame rate of the video.

3. Evaluation & implementation The block diagram of implementation and evaluation involves the implementation of above procedure on DSK using code composer studio is shown in fig.3. Steps involved in Implementation and Evaluation: Step1: Input video
Step2: Video to image Step3: Image conversion Step4: Image filtering Step5: Segmentation Step6: Feature Extraction
Step7: Velocity of the Object
The task of object tracking is performed by a video recorded with digital camera. The recorded video is in format of .mov with 30 fps. The video is converted into .avi format with 20 fps using ULEAD VIDEO STUDIO. Here it explains about the conversion functions that are performed to convert the recorded video into input format of image to code composer studio.
The steps for the conversion are
Step1.1: Video to images
Step1.2: Images to hexadecimal format
IJSER © 2012 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 3, Issue 11, November-2012 4
ISSN 2229-5518
4. Results:
Implementation of moving object tracking, the main application for security, surveillance and vision analysis, is evaluated on TMS320C6416T DSK by using the code
composer studio.
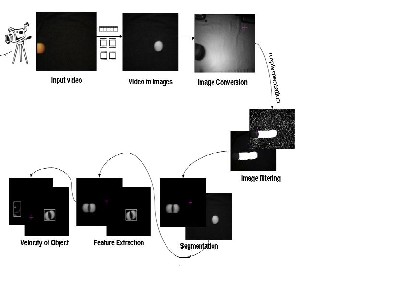
Fig.4. Step by step procedure for evaluation and implementation of single object tracking and velocity calculation.
Video to images can be done by converting all video frames into PGM format images using video image machine and GMP. Image conversion can be done by converting the image into hexadecimal format into PGM using C program. Before implementing segmentation algorithm noise can be removed by using median filter. Segmentation is done by using the frame difference between the successive video frames. After segmentation feature extraction can be done by drawing a rectangular box with the dimensions of residual image. The velocity of the moving objects is calculated by using the dimensions
of bonding box in 2-D space.
5. Conclusion:
Implementation of moving object tracking is evaluated on TMS320C6416T DSK which is a major application in security, surveillance and vision analysis. The imported images can be stored in TMS320C6416T DSK external memory. In future, algorithms can be implemented on other hardware devices. These algorithms can also be extended for the use of real-time applications and object classifications.
6. References:
1. Peter Mountney, Danail Stoyanov and Guang-Zhong Yang (2010). "Three- Dimensional Tissue Deformation Recovery and Tracking: Introducing techniques based on laparoscopic or endoscopic images." IEEE Signal Processing Magazine. 2010
July. Volume: 27". IEEE Signal Processing
Magazine 27 (4).
IJSER © 2012 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 3, Issue 11, November-2012 5
ISSN 2229-5518
2.Lyudmila Mihaylova, Paul Brasnett, Nishan Canagarajan and David Bull (2007). Object Tracking by Particle Filtering Techniques in Video Sequences; In: Advances and Challenges in Multisensor Data and Information. NATO Security Through Science Series, 8. Netherlands: IOS Press. pp. 260–268. ISBN 978-1-58603-727-
. CiteSeerX: 10.1.1.60.8510.
3.P. Salembier, F. Marques, M. Pard_as, J. R. Morros, I. Corset, S.Jeannin, L. Bouchard, F. Meyer, B. Marcotegui, Segmentation-Based Video Coding System Allowing The Manipulation Of Objects, IEEE Trans. Circuits Syst. Video Technol.,
7(1):60-74, February 1997.
4. A. J. Lipton, H. Fujiyoshi, R. S. Patil, Moving Target Classification And Tracking From Real-time Video, Applications of Computer Vision,1998. WACV ’98. Proceedings., Fourth IEEE Workshop on, pp. 8-14,1998.
5. Y. Wang, R.E. Van Dyck, J. F. Doherty, Tracking Moving Objects in Video Sequences, Proc. Conference on Information Sciences and Systems, Princeton, NJ, March
2000.
6. M. Vetterli, J. Kovacevic, Wavelets And Subband Coding, PrenticeHall, INC., Upper Saddle River, NJ, 1995.
AUTHOR’S PROFILE:

K.Sirisha did her M.Tech from, JNTU, Kakinada and was a first Ranker. She is presently working as Associate Professor in the department of Electronics and communication engineering at BVC Institute of Technology and Science, Amalapuram. Her interested subjects are Electronic Devices and Circuits, Pulse & Digital Circuits, Signals & Systems and Microprocessors.Her hobbies are disciplinary reading and philosophy.
AUTHOR’S PROFILE:

Dr.M.Ramesh Patnaik is Assistant Professor in the department of Instrument technology and formerly worked as Instrumentation engineer at Hindustan copper ltd, and as Asst. Manager with ABB Kent Taylor Ltd., He has quite a good number of publications is the field of fuzzy control, smart transmitters and general industrial control. And he is actively engaged in industrial consultancy and design. His research interests lie mostly in the field of industrial control, fuzzy control, sensors and system integration.
IJSER © 2012 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 3, Issue 11, November-2012 6
ISSN 2229-5518
IJSER IS) 2012
http://wwwij
ser org