

International Journal of Scientific & Engineering Research, Volume 4, Issue 4, April-2013 1092
ISSN 2229-5518
Fuzzy Noble Cluster Based Algorithm for
Removal of Mixed Gaussian and Impulse Noises
P.Venkatesan, Dr.G.Nagarajan,
Index Terms— Impulse noise, Gaussian noise, Fuzzy rules, PSMF, Fuzzy Averaging.
—————————— ——————————
1 INTRODUCTION
Most filters for Gaussian noise suppression are designed totake ad- vantage of the zero-mean property of the noise and tryto suppress it by locally averaging pixel channel values. Classicallinear filters, (1) and (2) such as the Arithmetic Mean Filter (2) .To approach this problem, many nonlinear methods have beenrecently proposed, for instance: the bilateral filter, the anisotropic diffusion, the chromatic filter, or the softswitching- methods in (4) and which motivate other fuzzymethods as the fuzzy direc- tional derivative filter, (5) and (6) the fuzzybilateral filter (4), the fuzzy noise reduction method, or thefuzzy-switching filter. The aim of these methods is to detectedges and details by means of local statistics and smooth themless than the rest of the image to better preserve their sharp- ness.However, these methods commonly identify impulses as detailsor edges to be preserved, and, therefore, they are not able to reducethem It is noted that earlier filters for impulsenoise are based on the theory of robust statistics because impulsesare identified with outlier data, and, therefore, robut to statistics allow appropriately determining noise-free samples and removing outliers. Filters of this family are,the popular median filter, the vector median filter,the vector directional filter, the direc- tional-distance filter,(6) and (7) the HSV vector median filter, among oth- ers. These filters are efficient in reducing impulse noisebut their signal- preserving capability is deficient because thefiltering operation is applied to each image pixel regardlesswhether it is noisy or not. To overcome this drawback, several adaptive filters have been recently introduced.
————————————————
P.venkatesan is currently pursuing Phd program in digital image processing in SCSVMV University, Enathur kanchipuram, Tamil nadu, India. E-mail: pv.ecekanchi@gmail.com
Prof.Dr.G.Nagarajan, HOD/ECE Pondicherry Engineering College
Pondicherry Tamil nadu, India.
These filters maybe classified into the following categories: switching filters, filters using weighting coefficients, fuzzy filters, and neuro-fuzzy filters. However, many of these techniques select the appropriate noise- free output from the input samples, and therefore, they are notuseful to remove Gaussian noise because in such a case thereare no noise-free samples, (5) and (7).according to the above, the filter design is a challeng- ing taskfor mixed Gaussian-impulse noise removal. A possible solution is to apply two consecutive filters to remove first impulse noise and then Gaussian noise, or vice versa. However, the applicationof two filters could dramatically decrease the computational efficiencyof the method which implies that this solution couldnot be practical for real applications. Therefore, it is more interestingto devise specific filters to remove mixed noise. To date, afew methods in the literature are able to approach this problemefficiently. The NobleCluster Averaging (NCA) technique presentedin removes mixed noise by combining a statisticalmethod for impulse noise detection and replacement withan averaging operation to smooth out Gaussian noise. The TrilateralFilter (TF) is based on the well-known BilateralFilter to (10) and (12) smooth Gaussian noise but including an impulsedetector to be also able to reject impulse noise. The AdaptiveNearest Neighbor Filter (ANNF) (8) and its variants, use aweighted averaging where the weights are computed accordingto robust measures so that impulses that receive lower weightsare reduced. The Fuzzy Vector Median Filter (FVMF) performsa weighted averaging where the weight of each pixel iscomputed according to its similarity to the robust vector median.Another important family of filters is the partition based filters, which classify each pixel to be processed into severalsignal activity categories which, in turn, are associated toappropriate pro- cessing methods. Other filters follow a regularizationapproach based on the minimization of appropriateenergy functions by means of Partial Dif- ferential Equations(PDEs).Wavelet theory has also been used to de- sign image filtering methods and the combination of collaborative and wavelet filtering is proposed in addition,other methods based on Principal Component Analysis (PCA) have been studied.
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 4, April-2013 1093
ISSN 2229-5518
The motivation of the method in this paper is the so- callednobleclusterconcept introduced and further studied. The noble clusterof a given pixel is a set constitutedby this pixel and those of its neighbors which are similar to it.However, the similarity between two color pixels is not easilyexpressed in a crisp way, and, therefore, in this work. The Proposeto use a fuzzy representation, this leads us to introduce the fuzzy nobleclusterconcept which use to devise a novel filteringprocedure. This paper uses fuzzy metrics, whichhave been proven to be efficient and effective for noise detection but, in this case, fuzzy metrics are applied to build the fuzzy nobleclusters. The proposed method is based onthe consecutive application of a fuzzy rule-based switching impulsenoise filter and a fuzzy average filtering. Both steps use thesame fuzzy noblecluster, which leads to computational savings.This filter differs from previous no- bleclustermethodsbecause (i) fuzzy nobleclustersare represented as fuzzy sets insteadof crisp sets used. (ii) It employs a novel fuzzymethod first to determine the fuzzy nobleclustermembers and thento assign their corre- sponding membership degrees, (iii) it usesfuzzy rules to detect impulse noise pixels, (iv) it performsa fuzzy weighted averaging to generate the output. Hence, thecombination of these fuzzy components is the main novelty ofthe proposed method. Experimental results will show that the proposed filtering technique exhibits competitive results withrespect to other state-of-the-art methods.
LetF denote the image to be processed, F 0 denote the central pixel of the processing sliding window of size n X n, and let Fi W, i= 1,..,n2 – 1 denote the pixels in the neighborhood of. Each pixel is represented as a 3- component vector comprising its R, G, and B components. Have chosen
the vector approach which is suitable for color image processing since it takes into account the correlation among the color image channels. The peer group of an image pixel, roughly speaking, is defined as the set of its neighbor pixels which are similar to it. There are several ways of determin- ing this set. One of them, introduced in and used in and, is based on the usage of a distance threshold to decide whether a pixel belongs to the peer group or not. This cardinality has been used to decide whether F 0 is free of impulse noise or not. It is to be noted that because of the usage of a threshold based decision, the peer group is defined in a crisp way. However, since the similarity between two color pixels is an imprecise concept, this approach does not provide a completely satisfactory representation of the peer groups, (7) and (11), therefore, propose to rep- resent this concept using fuzzy theory, from another point of view, the definition fuzzy peer group isbased on the ordering of the pixel neighbors with respect to its similarity to the central pixel, as follows; Let ρ be an appropriate similarity measure between two color vectors. The color vectors in the processing window are sorted in descending order with respect to its similarity to the central pixel. That is, the ordering of the
n2vectors of the processing window results in an ordered set of the ele-
ments or the color vectors W ’. Then, according to the definition of peer group given in for convenience, the peer group of (m+1) members associ- ated with F0. This peer group is a set constituted by F0and its ‘m’most similar neighbors, i.e.
m = {F(i), i = 0, ….m}; (1) The choices of the number of members of the peer group are a main issue within this approach. The works in propose to use the Fisher’s linear discriminant (FLD) to solve this task. This method provides the best
partition of the input set into two subsets so that it includes neighbors in
the peer group, and excludes the rest. Unfortunately, this approach does not work properly when the input set contains either only one cluster or more than two clusters of data. In our context, for instance, when pro- cessing a homogeneous noise-free area of the image only one cluster of data should be observed and, however, the FLD will always partition the data into two subsets. On the other hand, when three (or more) clusters of data are observed, which may occur for instance in an image area including impulse noise and edges, the partition given by the FLD does not necessarily leads to the desired noblecluster, as shown later. According to the previous discussion, it is essential to perform an appro- priate construction of the noble groups, which involves to accurately determining the number of noble group members. This information can be used to decide whether is free of impulse noise. Also, the noble group members may be used to smooth the Gaussian noise from. In this paper, propose a more appropriate fuzzy logic-based method to determine the noble cluster of an image pixel that will call fuzzy noble cluster, (13) and (14).
In this section, we investigate the usefulness of fuzzy nobleclusters for color imagedenoising. Propose a color image filter for suppression of mixed Gaussian-impulse noise which isbased on the fuzzy noblecluster concept and that we name FuzzyNobleCluster Averaging Filter (FNCA). As commented in the introductory section, pixel averaging allows removing Gaussian noise because of the zero-mean property of this noise. However, in order to avoid impulse noise perturbing this operation the impulse noise in the image must be reduced first. Therefore, we propose a filter performing in two steps, namely, (i) impulse noise de- tection and reduction and (ii) Gaussian noise smoothing, so that both steps follow a fuzzy approach that uses the information on the fuzzy peergroups, which is the main novelty introduced by the method. To reduce the impulse noise we propose a fuzzy rule based procedure which uses the fuzzy noble group concept. For Gaussian noise smoothing, we use a fuzzy averaging among the members of the fuzzy noblecluster of the pixel under processing. Fig. 4 shows a diagram of the process applied over each image pixel. The following sections detail the two steps of the proposed filter. The block diagram of the proposed algorithm is given in Fig 1.
An impulse noise pixel can be defined as a pixel which is significantly different from its pixels neighbors. Conversely, an impulse noise-free pixel should have some neighbors quite similar to it. According to the above, we can formulate this condition in terms of fuzzy nobleclustersas follows: a pixel is F0free of impulse noise if for fuzzy noblecluster F0it is satisfied that
“ AF0 (F(m)) is large” and “F(m)is similar to F0”. The following Fuzzy Rule 2
represents this condition:
Fuzzy Rule 2: Determining the certainty of the pixel to be free of impulse noise
IF “is large” and “AF0 (F(m)) is similar to F(m)” THEN “F0is free of impulse noise”.
To compute the certainty of the Fuzzy Rule 2 (which is denoted by CFR2 (F0)) we perform analogously that for the Fuzzy Rule 1. That is, the cer- tainty of “AF0(F(m)) is large” is given by LF0, according to (6), and the cer- tainty of “F(m)is similar to F0” is given by the function CF0. Finally, use the product t-norm as the conjunction operator so that
CFR2 (F0) = CF 0(F(m)) LF0(F(m)). Indeed, notice that CFR2 (F0) = CFR1 ( m). This implies that no additional computation is needed since this certainty is
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 4, April-2013 1094
ISSN 2229-5518
already computed. Now, use CFR2 (F0) to detect and replace impulses ac- cording to threshold-based rule shown in (7), at the bottom of the page, where is a threshold parameter with values in [0, 1] whose importance will be discussed later. This procedure constitutes a switching filter between the identity operation andthe VMF operation, which is used for being the most robust and well-known vector filter. However, other robust filtering structures could be applied, as well.
The second step of the proposed method concerns the Gaussian noise smoothing task. As mentioned above, propose to perform a weighted av- eraging operation among color vectors. So, to smooth the pixelF0 use the
members of PF0m where the weighting coefficient for each color vector is
its membership degree to the fuzzy nobleclusteras follows:
membershipdegree of the neighbor pixels depends on their fuzzy similarity with respect to the pixel under processing. The proposed method is able to accuratelydetermine the fuzzy noblecluster of any color image pixel overcomingshortcomings of previous noblecluster approaches.Second, have used fuzzy nobleclusters to define a two stepcolor image filter cascading a fuzzy rule-based switching impulsenoise filter by a fuzzy average filtering. Both steps use thesame fuzzy noblecluster, which leads to computational savings.Experimental results have shown that the proposed method isable to reduce mixed Gaussian- impulse noise exhibiting animproved performance with respect to state-of- the-art methodsmainly because of its ability to properly determine the fuzzy nobleclusters. Also, the proposed method is competitive when reducing noise from images which are corrupted only withGaussian noise
and only with impulse noise.
mmF
=∑FPF0 F0
out
m (F(i))F(i) / ∑ FP
i=0 i=0
m (F(i) (2)
[1] K. N. Plataniotis and A. N.Venetsanopoulos, Color Image Pro- cessingandApplications.Berlin, Germany: Springer, 2000.
It is to be noted that, unlike other smoothing filters based on weighting coefficients, such as those in the set ofNeighbor pixels involved in the proposed smoothing procedure is restricted to the members of the fuzzy noblecluster, which implies that only similar pixels are used. This approach should perform a better edge and detail preservation than those non restricted approaches since non similar color vectors out of the fuzzy nobleclusterdo not perturb the averaging.
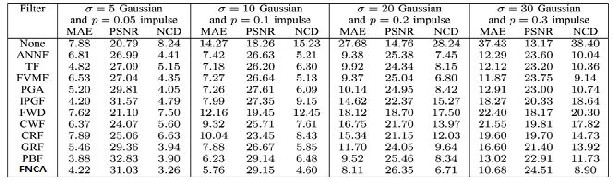
The test images Lena (Fig 2) andFlower (Fig 3) have been used to evaluate the performance of the proposed filter. These images have been corrupted with Gaussian and/or impulse noise. For Gaussian noise have used the classical white additive Gaussian model contaminating independently each color image channel where the standard deviation of the Gaussian distribution represents the noise intensity. On the other hand, the two most common impulse noise models assume that the impulse is either an extreme value in the signal range or a random uniformly distributed value within the signal range. These models are known as fixed-value and random-value impulse noise, respectively. Since the removal of fixed-value noise has been extensively studied in the literature and there have been several methods developed and able to suppress this noise effectively, in this paper we focus on the uncorrelated random-value case following the definition in. Mean Absolute Error (MAE), the Peak Signal to Noise Ratio (PSNR), and the Normalized Color Difference (NCD) are the measures used to evaluate the detail preserving capability, the noise suppression capability, and the color preservation ability, respectively for the proposed algorithm.Table 1 gives the comparison of the performance measured in terms of MAE, PSNR, and NCD using the Lena image contaminated with different densities of mixed noise.
5. CONCLUSION
In this paper, are introduced the concept of fuzzy noble cluster for a color image pixel which extends the concept of noble cluster in the fuzzy setting. This noble concept aims to representthe set of all pixel neighbors to a given pixel which are similarto it. Since the similarity between color pixels is an impreciseconcept, we have represented it using fuzzy similarities. Thus, fuzzynobleclusters are built as fuzzy sets where the
[2] R. Lukac, B. Smolka, K. Martin, K. N.Plataniotis, and A. N. Venet- sanopoulos, “Vector filtering for color imaging,” IEEE Signal Pro- cess.Mag., vol. 22, no. 1, pp. 74–86, Jan. 2005.
[3] R. Lukac and K. N. Plataniotis, “A taxonomy of color image filteringand enhancement solutions,” in Advances in Imaging and ElectronPhysics, P. W. Hawkes, Ed. New York: Elsevier,
2006, vol. 140, pp.187–264.
[4] C. Tomasi and R. Manduchi, “Bilateral filter for gray and color im- ages,” in Proc. IEEE Int. Conf. Computer Vision, 1998, pp. 839–846.
[5] M. Elad, “On the origin of bilateral filter and ways to improve it,”
IEEETrans. Image Process. vol. 11, no. 10, pp. 1141–1151, Oct.
2002.
[6] R. Garnett, T. Huegerich, C. Chui, and W. He, “A universal noisere- moval algorithm with an impulse detector,” IEEE Trans. Image Process., vol. 14, no. 11, pp. 1747–1754, Nov. 2005.
[7] P. Perona and J. Malik, “Scale-space and edge detection usinganiso- tropic diffusion,” IEEE Trans. Pattern Anal.Mach.Intell., vol. 12, no. 7, pp. 629–639, Jul. 1990.
[8] L. Lucchese and S. K. Mitra, “A new class of chromatic filters forcolor image processing: Theory and applications,” IEEE Trans. Image Pro- cess., vol. 13, no. 4, pp. 534–548, Apr. 2004.
[9] E. Abreu, M. Lighstone, S. K. Mitra, and K. Arakawa, “A new efficien- tapproach for the removal of impulse noise from highly corrupted im- ages,” IEEE Trans. Image Process., vol. 5, no. 6, pp. 1012–1025, Jun.1996.
[10] H. L. Eng and K. K. Ma, “Noise adaptive soft-switching median
filter,”IEEE Trans. Image Process., vol. 10, no. 2, pp. 242–251, Feb.
2001.
[11] D. Van de Ville, M. Nachtegael, D. Van der Weken, W. Philips, I.Lemahieu, and E. E. Kerre, “Noise reduction by fuzzy image filter- ing,”IEEE Trans. Image Process., vol. 11, no. 4, pp. 429–436, Apr.
2001.
[12] S. Morillas, V. Gregori, and A. Sapena, “Fuzzy bilateral filtering for- color images,” inProc. Int. Conf. Image Analysis and Recogni- tion,2006, vol. 4141, pp. 138–145, Lecture Notes in Computer Sci- ence.
[13] S. Schulte, V. De W itte, and E. E. Kerre, “A fuzzy noise reduction- method for colour images,” IEEE Trans. Image Process., vol. 16, no.5, pp. 1425–1436, May 2007.
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 4, April-2013 1095
ISSN 2229-5518
NoisyImage
Fuzzy peer group Con- struction
Impulse detection based on fuzzy rule
Average Fuzzy
Filtered Image
Impulse Detec- tion stage
Filtering Stage
PSMF
Fig1. Block Diagram of FNCA
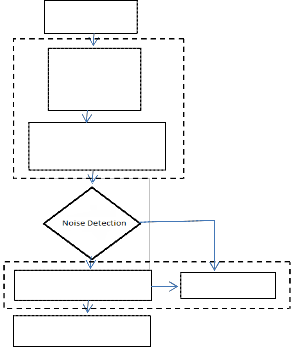
Fig 2. Filter outputs for visual comparison: (a) Lena image, (b) image corrupted with
(d) GRF, (e) PGA, and (f) FNCA
Table 1.COMPARISON OF THE PERFORMANCE MEASURED IN TERMS OF MAE, PSNR, AND NCD (210 ) USING THE LENA IMAGE CONTAMINATED WITH DIFFERENT DENSITIES OF MIXED NOISE
IJSER © 2013 http://www.ijser.org