lers.
International Journal of Scientific & Engineering Research Volume 4, Issue 1, January-2013 1
ISSN 2229-5518
Fuzzy Control System Review
Abdullah J. H. Al Gizi*, M.W. Mustafa, Malik A. Alsaedi, N. Zreen
Index Terms— Fuzzy, Intelligent Control System
—————————— ——————————
An intelligent system has the ability to act logically in an uncertain environment to achieve certain be- havioral sub goals which support the system's ultimate goal. Control systems are a key enabling technology for the increase in functionality and safety of many critical applications such as transportation systems, manufacturing systems, medical devices, and networked embedded systems . Modern power systems are non-linear and behave in a highly complex man- ner with continuous extensive variations in their operating conditions. Design of this type of systems requires knowledge in many multi-disciplines. The most popular technique is to use Fuzzy controller in which expert knowledge can be incor- porated into the design. Most of Fuzzy controllers which are used in industry have the same structure as incremental PD or PID controllers. Controller design using Genetic Algorithm and neural network has been combined with Fuzzy controller to form an intelligent control scheme. The first feedback de- vice on record was the water clock invented by the Greek Ktesibios in Alexandria Egypt around the 3rd century B.C . [2]
. This was certainly a successful device as water clocks of sim-
ilar design were still being made in Baghdad when the Mon-
gols captured that city in 1258 A.D. The first mathematical model to describe plant behavior for control purposes is at- tributed to J.C. Maxwell who in 1868 used differential equa- tions to explain instability problems encountered with James Watt's flyball governor; the governor was introduced in 1769 to regulate the speed of steam engine vehicles.[1] . When J.C. Maxwell used mathematical modeling and methods to explain instability problems encountered with James Watt's flyball governor, it demonstrated the importance and usefulness of mathematical models and methods in understanding complex phenomena and signaled the beginning of mathematical sys- tem and control theory. It also signaled the end of the era of intuitive inventions. Control theory made significant strides in
————————————————
This work was supported in part by the Universiti Teknologi Malaysia, under MOHE Scheme, GUP Grant No. 01H80
Mohd Wazir Bin Mustafa is with the Faculty of Electrical Engineering,
Universiti Teknologi Malaysia, Johor, Malaysia (e-mail: wa-
zir@fke.utm.my).
Abdullah J. H. Al Gizi is with the Faculty of Electrical Engineering, Uni-
versiti Teknologi Malaysia, Johor, Malaysia (corresponding author
0060102831074; e-mail: abdullh969@ yahoo.com).
the past 120 years, with the use of frequency domain methods and Laplace transforms in the 1930s and 1940s and the devel- opment of optimal control methods and state space analysis in the 1950s and 1960s. Ideas such as optimal control (in the
1950s and 1960s) and stochastic, robust, adaptive and nonline- ar control methods (in the 1960s till today), have made it pos- sible to control complex dynamical systems more accurately than the original flyball governor.
Owing to recent rising interest in intelligent control sys- tems , it has been necessary to collect and classify these con- trol systems and explain how their control techniques were developed. Despite the increase in the number of papers de- scribing intelligent control techniques, understanding of the application of these techniques among the community of prac- tice is somewhat sketchy. This is because those papers specifi- cally deal only with research works which are aimed at achieving overall intelligent control using the techniques of fuzzy logic.This paper will attempt at classifying intelligent fuzzy control systems according to the control techniques used. There will be a discussion on how their intelligent con- trol can be improved.
There are two main types of fuzzy logic based con- troller [5-12]. The first is the madman type fuzzy logic control- ler which is adaptive and where the system to be controlled is not explicitly identified. The second is the Takagi-surgeon type fuzzy logic controller (FLC) which is indirectly adaptive and where the system to be controlled is identified using T-S fuzzy model . The controller is designed based on the identi- fied model.
Rule base approach provides a useful framework
for the definition of different methods of logic control [13-15]. Controller design using the rule based approach would as- semble three component implementation phases. These are the knowledge acquisition phase, the model development phase and the model testing phase Examples of rule base
IJSER © 2013
International Journal of Scientific & Engineering Research Volume 4, Issue 1, January-2013 2
ISSN 2229-5518
structure can be found in Fuzzy PI/PD/PID controllers,
in the neighborhood of 0 and
V(x) is negative definite in the
Fuzzy Lyapunov controllers and Self organizing rule control-
lers.
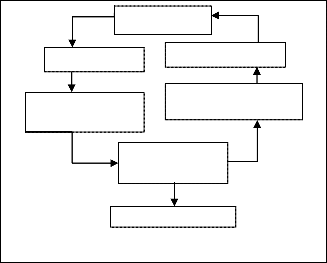
PROCESS
SENSORS ACTUATORS
FUZZY TO CRISP
neighborhood of 0. Fuzzy Lyapunov controller, assumes prior knowledge of the system model. Under normal circumstanc- es, only some partial knowledge about the system is known. Hence, it will be necessary to treat FLC as a classical case where a Lyapunove function candidateV is considered . The
derivative of V (which is is V ) is then calculated and used to obtain the fuzzy rule base for the control input u as long as
CREISP TO FUZZY
INFRANCIES
INFREANCE MACHENISM
FUZZY RULE BASE
INTERFACE
V is negative definite . According to the rule base , a fuzzy
controller u is obtained using general inference mechanism
and defuzzifiction method.FLC structure. That is with the
rule base it will be possible to formulate the resulting condi-
tions in the form of rules in one of two possible representa-
tions. That is
1: IF x1 is A1 and /or x2is A2 ….and/or xn is An THEN u is B,
where Ai and B are linguistic variables (e.g. large
.small).Representation
Fig.1 Mamdan type of fuzzy logic controller
2: IF x1 is A1 and /or x2is A2 ….and/or xn is An THEN u is
Fuzzy rule base is normally run from statements con- taining fuzzy IF-THEN rules to derive the linguistic values for the intermediate and output linguistic variables
Let us denote the error and change of error as e and
e and control input as u respectively .Looking at the output
response curve the following rules can be formed: PD, PID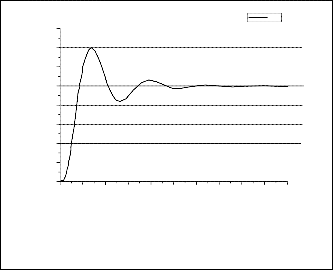
f ( x1 , x 2 .......... .... x n ) where
1.6
1.4
1.2
1.0
f (i ) is a linear function.
%1
II. IF e is ME and e is ME.THEN u is MEDIUM III. IF e is SE and e is LE.THEN u is NEGATIVE
SMALL
Fuzzy PI/ PID controllers provide the rules base that gives the change in controller output, i.e. u(t 1) u(t) u
where u can be found from the fuzzy rule base, and Fuzzy
0.8
0.6
0.4
0.2
0.0
SE ME LE
0 10 20 30 40 50 60 70 80 90 100
Time(sec)
PD controller is the control input u is directly computed from the rule base. Fuzzy PI/PD/PID controller rule base is illus- trated as follows:
In a general FLC the control objective is to design a fuzzy controller using information based on some physical intuition event if the exact system dynamic is not known but the main problem is constructing the rule base for the controller .In a typical mamdani type FLC, the rule base is obtained using the
notion of classical PD ,PI, or PID controller in Fuzzy Lyapunov
Fig.2.Looking at the general characteristics of PI/PD/PID re-
sponse the rule base is formed LE, ME and SE denotes LARGE, MEDIUM and SMALL error respectively.
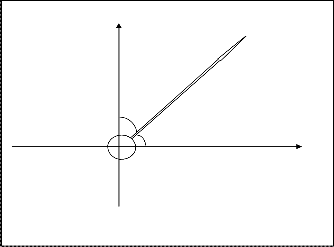
To understand the use of FLC, it is useful to see how it is used on a Single Linked Manipulator (SLM): which is normal- ly considered as a dynamic model described by the equation
ml2 mglsin ,
control environment. The rule base is formed using the no-
Where m 1kg ,
g 9.81kg , x
, x
{afferent
tion of Lyapunov Stability Theory for which
V ( x)
repre-![]()
meter2 1 2
sents a general single input single output nonlinear system.
knowledge } , .
The value
x
f ( x, u) is considered Lyapunov stable around
Fuzzy Lyapunov controller:
the operating point x 0 .
There exists a continuously differentiable function
V ( x) ,
SLM Without knowing the complete dynamics of the system,
the following statements can be made: S-1 the relevant state
known as Lyapunov function where V ( x) is positive definite
variables are x1 and x2 ,S-2, x is proportional to
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 4, Issue 1, January-2013 3
ISSN 2229-5518
,Let us take a lyapunov function candidate
V 1/ 2( x2 x2 )
1 2 .
Y
Angle Ѳ
ar matrix inequity approach for the control of Uncertain Fuzzy systems[21].
Type-1 and Type-2 FLSs (fuzzy logic system) have received increasing attention recently [22]. Type-2 (T2) FLSs have been
m applied in many engineering areas, demonstrating their ability to outperform Type-1 (T1) FLSs mainly in the presence of dy- namic uncertainties [23]-[24]. The major difference between T1 and T2 FLSs is in the model of individual Fuzzy Sets (FSs) which use membership degrees that are themselves FSs. The most commonly used kind of T2 FLS is the Interval T2 (IT2) FLS, which uses interval membership degrees. Many research-
X ers argue in favor of IT2 FLSs because of their potential to
Motors
Center torque
model and minimize the effects of dynamic uncertainties [25].
Typically, the performance of IT2 FLSs in various applications
is compared to their T1 counterparts demonstrating improve-
ments when noise and uncertainty are introduced into the
system. Many researchers associate the geometrical properties
Fig.3. Single Link manipulator
The time derivative of V is: V (x1x1 x2 x2 )
Where x1 x1, x2 ,Using S-1 and S-2. V (x1x2 x2)
.Find FLC rule such that v qualitatively negative defi-
nite,V (x1x2 x2) , Can make negative definite if the rule
base is formed as follows:
of the interval centered with the uncertainty about the sys- tem’s output [26,27].whereas, a method for incorporating the experimentally measured input uncertainty into the design of the IT2 FLS was proposed [28]. Interval type-2 fuzzy logic con- trollers (IT2 FLCs) have been attracting great interests recent- ly. Many reported results have shown that IT2 FLCs are better able to handle uncertainties than their type-1 (T1) counterparts [29], [30], [32], [33].Wu and Tan [31], [32],[33] showed through both simulations and experiments that IT2 FLCs are better able to cope with modeling uncertainties, and hence IT2 FLCs
IF x1 is negative AND x 2
is negative, THEN is positive big
optimized from simulations are more likely to perform well on
IF x1 is positive AND
big
IF x1 is negative AND
x 2 is positive, THEN is negative
x 2 is positive, THEN is zero
the actual plant than T1 FLCs. Dongrui Wu, [34] explains that
the two fundamental differences between IT2 and T1 FLCs
are: 1) Addictiveness, meaning that the embedded T1 fuzzy
sets used to compute the bounds of the type-reduced interval
change as input changes; and, 2) Novelty, meaning that the
IF x1 is positive AND x 2
is negative, THEN is zero
upper and lower membership functions of the same IT2 fuzzy
In general (FLC using TS fuzzy model)Takuge-sugeno type fuzzy logic controller is an example of indirect adaptive control .The main steps are identifying the nonlinear system in terms of T-S fuzzy model and designing the controller based on the identified T-S fuzzy model .There are three different control structures using T-S fuzzy model. The first controller is designed with common input matrix ,the second linear con- troller is designed using robust control approach and the third controller is designed using LMI techniques.
Many important research work in this field have been carried
out by several researchers. T.Takage and M .Sugeno ap-
proached Fuzzy identification from the coition of system
when applied to modeling and control[17]. P.I.Kar ,Prnam Karmer and L. Bahera performed identification and stabiliza- tion of nonlinear plants using Fuzzy neural networks [18]. They also suggested a workable variable gain controllers for
set may be used simultaneously in computing each bound of the type reduced interval. T1 FLCs do not have these proper- ties; thus, a T1 FLC cannot implement the complex control surface of an IT2 FLC given the same rule base.
Let us consider a class of discrete nonlinear dynamical sys- tems described by the vector equation
x(k 1) f (x(k),u(k))
y(k) h(y(k),u(k))
x is a one-dimensional state vector , u is a p-dimensional in- put vector and y is an m-dimensional output vector. The
above system can be effectively modeled by fuzzy merging of equivalent linear systems in different operating regions using Takuge_sugeno (T-S) fuzzy model.
T-S Fuzzy model
nonlinear systems using T-S Fuzzy model [20]. S.H.Zak pro- posed stabilizing fuzzy system models using linear control-
A T-S Fuzzy model is composed of r rules where j th
the following form.
rule have
lers [19]. K.Tanaka proposed a novel fuzzy –neural-linear
F j x (k) is j
control systems with desirable stability and stabilizability [7]. H .K.Lam , F.H.F.Leung and Peter K.S.Tam proposed a line-
Rule: IF x1 (k ) is
1 AND ….AND n
Fn THEN
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 4, Issue 1, January-2013 4
ISSN 2229-5518
x(k 1) Ajx(k)Bju(k)
, y(k ) C j x(k ) D j u(k ) , Where
Then![]()
a 2 f
![]()
linear f
, B g(xu) [reference system
x [x1 , x2 ,...........xn ]
j 1......... .....r .Given a current
x u
state vector
x (k )
and a input vector u (k )
,the T-S fuzzy
and control .H.Zak] .Thus two rules of T-S fuzzy model pa-
B
model inters
r
x(k 1)
rameters are j
R1:If x 0, x x u, A1 1, B1 1
( A x(k )) B u(k )
as x(k 1)
![]()
j 1 j j j ,
r
R1:If x 1, x 2 x u, A2
2, B2 1
j 1 j
r
The linear model parameters A j s and B j s also be identifi-
y ( k )
j 1 j ( C j x ( k )) D j u ( k ) ,
j 1 j
r
cation
From the input –output data of the system using a
fuzzy neural network(FNN)
When using a FNN the elements of A j and B j are
Where
i (x ),
j1
i (x )
j
is the membership function of
the weights of the neural network
Least square cast function is used to find the proper
the fuzzy term F n j 1,2..............r .
j
![]()
The overall fuzzy system can be simplified into
weights.
Weights are updated using the standard gradient de-
scent algorithm.![]()
x ( k 1) A j x ( k ) B j u ( k )
![]()
![]()
y ( k ) C j x ( k ) D j u ( k ) the
, T-S fuzzy model with a common input matrix![]()
Discrete time T-S fuzzy model
Nonlinear
x ( k 1 )
![]()
![]()
![]()
A x B u ( k )
system x ( k 1)
where
f ( x ( k ) yu ( k )), y ( k ) h ( x ( k ) yu ( k ))
Continuous time T-S fuzzy model x A x B u
r r r r
Where![]()
A r
j A j
![]()
, B r
j B j the system will
![]()
![]()
![]()
![]()
A j 1 j A j , B j 1 j B j , C j 1 j C j , D j 1 j D j
j 1
j 1
,
j K 1
have a common input matrix when
j
BYJB is a constant
![]()
j 1 j
k 1 j
matrix. Utility of common input matrix. Suppose we design
individual linear controller for individual subsystems .This![]()
The overall system is nonlinear since A is a function of j
and j is a function of x (k )
control action corresponding to jth subsystems is denoted by uj(k).If all linear subsystems have a common input matrix B than an overall control input of the from
r
u(k)
j 1
j u j (k) will curry than the individual subsys-
“Continuous time counterpart of the overall fuzzy system is
tem are excised by inspective control inputs.
x
![]()
![]()
![]()
![]()
A x B u , y C x D u where
Controller design with common input matrix
x
r
j 1
![]()
j ( A j x B j u ) , A
r
j 1
j A j ,
Many researchers have made the system stable by using input data matrix which can be illustrated as follows:![]()
B
![]()
r B , C
j 1
j 1
![]()
j C j , D
r
j 1
j D j
Suppose the individual control input has a form
Identifying the linear model parameters .The parameters Aj and Bj can be found
u j (k ) k j x(k )
for discrete time. T-S fuzzy models which
By linear zing the nonlinear system dynamics
Example: suppose the nonlinear dynamic is
is the overall system can be made stable if
There exists a common input matrix B for all subsystems
The individual gain matrices Kj is such that
x F ( x, u ) ( x x 2 ) u
the sum is to find A and B such
Aj
A j B j K j f haven singular values less than unity
that in u neighborhood of a operating point
F ( x , u ) ( Ax Bu )
For continuous T-S fuzzy model, the overall system can be made stable if
When x 0
0 , A ![]()
f , B f
x u
(Using Taylor ‘s
There exists a common input matrix B for all subsys- tems
series expiration)
The individual gain matrices Kj are designed such
When x 0 0, A and , B can be found out for affine
that![]()
1 ( A T
A j
) have action part‘s stability signal values
type systems ie. x
f ( x) g ( x)u in that case ,if T
de- 2 j
note the i the row of A.
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 4, Issue 1, January-2013 5
ISSN 2229-5518
, where
Aj
Aj B j K j
where ,
uj kj xj
for all
The T-S model linear plant with nonlinear disturbance
The T-S fuzzy model can be rewritten as
r r r
system controller u(k )
j 1
j u j (k) .
x(t) Ax(t) Bu(t ) j 1 j ( A j A) x(t) j 1 j (B j B)u(t)
The system’s stability is dependent on Hrmashan part
Ax(t) Bu(t) F ( x(t),u(t)) where
Ax(t) Bu(t) is
![]()
{ 1 ( A T
A
), A }
the linear system and F(x(t) u(t))
2 j j j
is the nonlinear disturbance given by
For both continuous and discreet time systems the overall sys-
tem can be made stable if
F(x(t),u(t)) f (x(t) Bh1(x(t)) Bh2(u(t))
Compu-
There exists a common input matrix B for all subsys- tems.
ting the norm bounds of f ,h1 and h2 controllers are de-
signed to make the T-S fuzzy model Lyapunov stable.
S;H.Zak(1999) and( Prem Kumar PI.Kar and I Behe-
The individual gain matrices K j
‘s are designed such
ra(2006)) [45-46] have proposed several applications of T-S
that A j
A j B j K j
‘s and symmetric [17,18]
Fuzzy model when it is Lyapunov stable. For a control sys- tem, the fundamental requirement is stability. While nu-
Many fuzzy clustering studies have been conducted based on dissimilar and similar relationships between plants. Subse- quently rules were extracted utilizing fuzzy clustering method [35-37]. Permanent magnet synchronous motors have been used as servo motors under vector control techniques and var- ious control methods have been applied to (permanent mag- net synchronous motor)PMSM motors [38]-[39].There are two types of PMSM. The first one is Surface PMSM(SPMSM) and the other is interior PMSM(IPMSM(interior permanent magnet synchronous motor)).In the control of SPMSM, the system can be considered as linear with the d-axis current controlled to be zero. In this case, SPMSM can be modeled as DC motors [40][41]. In the T-S fuzzy identification of IPMSM, a set of local dynamic linear models will be provided with high accuracy. T-S fuzzy identification can provide an accurate system de- scription with membership functions and a series of linear dynamic equations [42 -44].One of the best control method for nonlinear system is T-S fuzzy control. In the actual IPMSM, it is very difficult to get the parameters of IPMSM. An efficient method is used to derive T-S fuzzy model of IPMSM using the data from the actual IPMSM.
TS fuzzy model is normally expressed in terms of a single lin- ear plant while the rest of the linear models are expressed as a disturbances to this. The norm bound on the disturbance is computed based on the norm bound of the controller which is designed to make the overall system Lyapunov stable.
The T-S model is expressed in terms of r fuzzy rules:
Rule i: if xi (t) is F n AND …………….AND xn(t)is F n THEN
i i
x(t ) A x(t ) B u (t ) F n ,j=1,2,…..n is the j th fuzzy set of
i i j
th r i j
merous high efficient converters have been constructed for various applications, there have been continuing efforts devoted to the stability analysis of power electronic con- verters [47]. A nonlinear system approach was developed for analysis and design of power electronic converters [48], where the DC-DC converter was modeled as a differential equation with a bilinear term and input saturation (the hard limit on the duty cycle). Another non linear system approach uses boost, buck-boo stand converters which have been used to condition the power supplied by photo- voltaic batteries [49]. Of late, different control approaches have been applied to space vector modulated direct torque controlled IPMSM (interior permanent magnet synchro- nous motor) drives in the search for more desirable drive performances in terms of both steady state and transient responses [50-55]. As far as intelligent based direct torque control schemes are concerned, some Fuzzy controlled DTCs [50] and Neuro-Fuzzy controlled DTCs [51] have been reported. Despite a more robust performance espe- cially in the case of ill-defined and uncertain systems, the fuzzy controller still encounters the lack of a systematic method for tuning. Such a difficulty was resolved by add- ing the learning capability of neural networks, but the per- formance in the presence of disturbances, parameters vari- ation and system uncertainties was not optimal. Some oth- er researchers proposed the direct torque control schemes based on adaptive controllers such as input-output feed- back linearization [56] and adaptive back-stepping [57].Although, a much smoother steady state performance were obtained, the transient drive response was not satis- factory which was mainly due to the sluggish estimation of motor parameters through the generated adaptation laws.
In addition, all adaptive based DTCs demand a precise mo-
the i rule . Let (x ) .Where r ( x )
j 1
ship function of the fuzzy set
is the member-
tor model, thus some modeled dynamics and disturbances could considerably deteriorate the drive performance.
n ,j=1,2,………….…..r the overall system is
r
In this control strategy the stability of the closed loop system is
x(t )
j 1
j ( A j r (t ) B j u (t )) where
guaranteed by finding a common Lyapunov function for all
j
j
![]()
j
k 1 j
1 .
the local linear models. This can be expressed in the form of a Linear Matrix Inequality (LIM). A stable fuzzy controller can be designed by solving the LMI’s. Let us consider the follow-
j 1
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 4, Issue 1, January-2013 6
ISSN 2229-5518
ing T-S Fuzzy model which is locally described by ith rule.
matrix P such that HT
Px Hij P 0
According to ith rule, if x1(t) is F1 and x2 (t) is F2 and xn(t) is
F r THEN x(t) A x(t ) B u(t)
i for r=1…...r.
LMI eq. is normally expressed (for discrete as well as for con-
T
tinuous time) as Hij Hij
Hij Hij
![]()
t=1,2,…r.
u ( t ) k i x ( t ) t=1,2,..r
![]()
P P
2 2
0, i j ji 0
In addition , as described earlier, given a current state vector x(t) and an input u(t) the T-S model infers that the value
There are various algorithms available in literature{
of x(t)
r
can change as follows:
H.O.Wang K.Tanaka and M.F.Griffen (1996),E.Kian and
D.Kim (2001),H.K.Larn and F.H.F.Leungand Peter
K.S.Tam.A.(2002),K.Tanaka , T.Ievade and H.O.Wang(May
x(t ) j i (Ai x(t ) Bi u(t )) .Where i
earlier.
have been defined
1998.),E.Kain and H.Lee(Oct 2000),C.H Fang Y-S Liui.S-W Kau. I .Hong and C-H Lee(June 2006) and D. Giaouris, S.
The final output of the fuzzy controller is
r
Banerjee, B. Zahawi, and V. Pickert, (May 2008) [57-63]}. on how to get the controller parameters by solving the above
u (t ) j i K i x(t )
where ui ki xi (t ) , for individual
LMI’s. Floquet theory has also been used to study the stability
closed loop. The subsystem becomes
of system trajectories by deriving the absolute value of the
x (t )
r
j 1
j ( Ai x(t ) Bi
r
j 1
i K i x(t ) . After simplifica-
eigenvalues of the monodromy matrix (i.e., the so-called Flo- quet multipliers of the system) [64]–[65]. The implementation
tion x can be written as
of these strategies is still not widely adopted since they are
x (t )
j 1
i H i
x (t ) 2
j 1
H ij
![]()
j i {
H
ij }x (t )
2
vulnerable to noise and suffer from a high-computation- time requirement [66]. The TS fuzzy approach (model based or non model based) has already been applied to control power elec-
where Hij Ai Bi Ki .
Consider a Lyapunov function candidate,
tronic converters [68], [67]. One of the main drawbacks of these previous attempts is the derivation of the fuzzy model
V xT P and V xT P xT P
x x x
r r
, giving
H H
from the average dynamical model of the converter, thus ig-
noring all converter fast-scale instabilities as outlined previ-
ously.
x (t )
j 1
i H i
x(t) 2
j 1
![]()
j i {
2
ij }x(t)
where
H i j
A i
B i K
i we can write
r 2 T T
r T H ij H ij
The research on the intelligent system fuzzy was re-
v j 1 i x
H i Px 2 j 1 j i x {
![]()
2 }Px
viewed with a focus on the historical development of new technical and strategies to improve the activity of the intelli-
x T P r 2 H x 2 x
j 1 i i
![]()
T P r { H ij H ij }x
j 1 j i 2
gent control systems .As described the above, in the search for intelligent control, significant effort has been devoted to the development of new control technique and active sites on in-
r 2 T T
v j 1 i x
(H i
Px PH i ) X
T
telligent, as well as elucidating the major methods. This has
led to significant progress in the field of an intelligent control
r T H ij H ij
H ij H ij
systems fuzzy, especially in least years. However, the devel-
2 j 1 j i x
![]()
2
![]()
Px P x
2
opment of an intelligent control with fuzzy is still needed. The drawback of both general and Lyapunov like Mamdani type
Since i
T
is a position quantity, V will be negative definite
(fuzzy logic controller)FLC is that the parameters associated with the FLC are heuristically updated .In general, Takuge-
if H i
Px PH i 0
T
for r=1…...r LMI eq.
sugeno type fuzzy logic controller is an example of indirect
Hij Hij
Hij Hij
adaptive control. The main steps are identifying the nonlinear![]()
![]()
P P
0,i j ji 0…...LMI eq. The
system in terms of T-S fuzzy model and designing the control-
2
2
ler based on the identified T-S fuzzy model. There are three
above expressions are basic stability conditions. The controller parameter K i is hidden in that expression. The above can be further re-expressed in different suitable forms and the con-
different control approaches using a T-S fuzzy model the first controller design with common input matrix, the second linear controllers using robust control approach and the third con-
troller parameter
K i can then be obtained by solving those
troller design using LMI techniques.
equations stated earlier.
r
ACKNOWLEDGMENT
Thus
u j k j x j , u j 1 j u j
For discrete time case the
The author gratefully acknowledges the Faculty of Electrical
equilibrium point of the overall fuzzy system is generally as- ymptotically stable if there exists a common positive definite
Engineering, Universiti Teknologi Malaysia for giving the support in this work.
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 4, Issue 1, January-2013 7
ISSN 2229-5518
REFERENCES
[1] J. Antsaklis Panos, A.Stiver James and M. Lemmon, “Hybrid system modeling autonomous control system “,Deportment of electrical engineering university of Notre Dame , Notre Dame in 46556
USA.vol 736,pp.366-392, 1993 .
[2] P.J. Antsaklis, "Intelligent Control," Encyclopedia of Electrical and
Electronics Engineering, Vol. 10, pp. 493-503, John Wiley & Sons, Inc.,
1999.
[3] J.R.Slagle, , M.W. Gaynor, and E.J. Halpern,” An intelligent control strategy for computer consultation,” IEEE Trans Pattern Anal Mach Intell, vol.6 no.2,pp. 129-36 ,1984.
[4] J.A. Blom, “ Intelligent bed-side data management and control sys- tems,” Biomed Tech (Berl), vol.35 no. 3, pp. 268-9, 1990.
[5] A.Homater and E.McCormick ,”Simultaneous Design of Member- ship Functions and rule sets for fuzzy controllers using Genetic algo- rithms ,”IEEE Trans.Fuzzy systems ,vol.3,no2, pp 129-138,1996
[6] K.K.N.Sartry .L.Behera and I.J.Nagrath,” Differential evaluation based fuzzy logic controller for nonlinear process control, “Funda- ments information,1999 .
[7] K.Tanaka,”Stability and stabilizabilty of fuzzy –neural-linear control systems,”LMI IEEE Trans Fuzzy syst, 1995.
[8] E.H.Mandani ,”Application of Fuzzy algorithms for the control of a
Dynamic Plant ,”Proc IEEE,vol.121,no.12,pp,1686-1688 ,1974.
[9] L.A.Zedeh ,”A fuzzy –algorithmic approach to the delft ration of complex or imp rose concept ,”lnt. Jour Man-Machine students
,vol.8,pp.249-291,1976.
[10] W.J.M.Klchant and C.H ,”Mamdani Analysis of a fuzzy logic control- ler,” Fuzzy sets and systems ,vol.1,pp 29-44, 1978.
[11] C.C.Lee Fuzzy logic in control systems ,”Fuzzy logic controller parts
I and II,”IEEE TNN,Syst.Man Cybern.,vol,20,no,2,pp 404-435, 1990 [12] M.Mzumoto ,”Relazation of PID controller by fuzzy control meth-
ods,” Fuzzy Sets and systems,vol.70,pp 171-182,1996.
[13] G.K.I Mann, H. Bao-Gang, R.G. Gosine ,” Analysis of direct action fuzzy PID controller structures ,vol.29,no,3,pp.371-388,1999.
[14] A.-Lopez ,A.Aguilar-martin ,J.A simplified version of mamdani fuzzy controller :the natural logic controller ,”IEEE TNN ,Fuzzy Syst
,vol .14, no.1,pp.16-30,2006.
[15] M.Margaint and G.Lunghotz,” Fuzzy lyapunov-based approach to design the fuzzy controllers,”Fuzzy sets and systems,vol.106,pp.49-
59,1999.
[16] C .L. Karr and E.J.Gentry ,”Fuzzy control of PH using Genetic Algo- rithms ,”IEEE TNN Fuzzy syst, vol. 1, no .1,pp:46-53,1993.
[17] T.Takage and M .Sugeno ,”Fuzzy identify coition of system and Its
application to modeling and control ,”IEEE Trana SMC 1985.
[18] I.Kar, P.Prem Kumar, and L. Behera ,”On identification and stabili- zation of nonlinear plants using Fuzzy neural network ,”IEEE conf.on SMC ,Harans USA ,2005.
[19] S.H.Zak ,” stabilizing fuzzy system models using linear control- ler,”IEEE trans. Fuzzy syst.1999.
[20] P. Prem Kumar , I.Kar ,and L. Behera ,”Variable gain controllers for
Nolinear systems using T-S Fuzzy model ,”IEEE Trans on SMC,2006 [21] H .K.Lam and F.H.F.Leung and peter K.S.Tam ,”A linear matrix in-
equity approach for the control of Uncertain Fuzzy systems ,”IEEE Control Systems Magazine 2002.
[22] S. Coupland, R. John,“Geometric Type-1 and Type-2 Fuzzy Logic
Systems,” in IEEE Trans. on Fuzzy Systems, vol.15,no.1,pp. 3-
15,February 2007.
[23] M. Biglarbegian, W. Melek, J. M. Mendel, “On the robustness of
Type-1 and Interval Type-2 fuzzy logic systems in modeling,” in In- formation Sciences,vol. 181,no.7,pp. 1325-1347,April 2011.
[24] O. Linda, M. Manic, “Interval Type-2 Fuzzy Voter Design for Fault
Tolerant Systems,” in Information Sciences, in press, 2011.
[25] O. Linda, M. Manic, “Comparative Analysis of Type-1 and Type-2
Fuzzy Control in Context of Learning Behaviors for Mobile Robot- ics”, Glendale, Arizona, USA in Proc. IEEE IECON’10, 36th Annual Conference of the IEEE Industrial Electronics Society,pp. 7-10,Nov
2010.
[26] Q. Ren, L. Baron, K. Jemielniak, M. Balazinski, “Modeling of Dynam- ic Micromilling Cutting Forces Using Type-2 Fuzzy Rule-Based Sys- tem,” Spain in Proc. IEEE World Congress on Computational Intelli- gence, Barcelona, 2311-2317, 18-23 , July 2010.
[27] Wu, J. M. Mendel ,“Uncertainty measures for interval type-2 fuzzy
sets,” in Information Sciences, no. 177, pp.5378-5393 , 2007.
[28] O. Linda, M. Manic, “Uncertainty Modeling for Interval Type-2
Fuzzy Logic System Based on Sensor Characteristics,” in Proc. 2011
IEEE Symposium Series on Computational Intelligence, pp.31-37, April 2011..
[29] O. Castillo and P. Melin,” Type-2 Fuzzy Logic Theory and Applica- tions,” Berlin: Springer-Verlag ,2008.
[30] ——,“Type-2 FLCs: A new generation of fuzzy controllers,” IEEE Computational Intelligence Magazine, vol.2,no.1,pp. 30–43,2007.
[31] D. Wu and W. W. Tan, “A type-2 fuzzy logic controller for the liquid- levelprocess,” in Proc. Budapest, Hungary ,IEEE Int’l Conf. on Fuzzy Systems,vol. 2,pp. 953–958, July 2004.
[32] ——, “Genetic learning and performance evaluation of type-2 fuzzy logic controllers,” Engineering Applications of Artificial Intelli- gence,vol.19,no.8,pp. 829–841, 2006.
[33] ——, “A simplified type-2 fuzzy controller for real-time control,” ISA Transactions,vol.15,no.4,pp. 503–516 , 2006.
[34] D. Wu,” On the Fundamental Differences between Interval Type-2 and Type-1 Fuzzy Logic Controllers,” IEEE Transactions on, vol.99,pp. 1 – 1, 2012.
[35] L. Jin-ze, Z. Q,i ,and W. We,I et al, ”PoClustering: lossless clustering of dissimilarity data[C] //Proc of the 7th SIAM International Confer- ence on Data Mining,pp.55-81, 2007.
[36] K. Ngm,J. Lim, and J. Huang, et al. On the impact of dissimilarity
measure in k-modes clustering algorithm [J].IEEE Trans on Pattern analysis and Machine Intelligence, vol.29, no.3, pp: 503-507, 2007.
[37] D. B .Hitchcock, and Z.-min Chen,” Smoothing dissimilarities to cluster binary data[J],”Computational Statistics and Data Analysis, vol.52,no.10:pp.4699-4711, 2008.
[38] K.Rajesh, R. A. Gupta and S.Rajesh ,” Surjuse.High-Performance SVPWM-VCIM Drive with Adaptive Neuro-Fuzzy Speed Control- ler,”International Journal of Computer and Electrical Engineering, vol.2,no.1,pp.1793-8163, Feb 2010.
[39] A.G. Aissaoui, M. Abid, A. Tahour and A. C. Megherbi, “A Fuzzy Logic and Variable Structure Control for Permanent Magnet Syn- chronous Motors,” International Journal of Systems Con- trol,vol.1,no.1,pp.13-21,2010.
[40] I.Boldea, , M.C. Paicu, G.D. Andreescu, and F. Blaabjerg ,”Active flux orientation vector sensorless control of IPMSM,” Proc. Of IEEE Op- timization of Electrical and Electronic Equipment, pp.161-168 , May
2008.
[41] C. Md. and M.N ,Uddin ,”Nonlinear Control of Interior Permanent Magnet Synchronous Motor Incorporating Flux Control” , Canadian Proc. Of IEEE Electrical and Computer Engineering,pp. 815-818,May
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 4, Issue 1, January-2013 8
ISSN 2229-5518
2006.
[42] P.-Tsun Lin, C.-Hsu Wang and T.-Tian Lee ,”Time-Optimal Control of T-S Fuzzy Models via Lie Algebra,” IEEE Transactions on Fuzzy Systems, vol.17,no.4, pp.737 – 749 , 2009.
[43] C.-Feng Juang and C.-Da Hsieh,”A Locally Recurrent Fuzzy Neural Network With Support Vector Regression for Dynamic-System Mod- eling,” IEEE Transactions on Fuzzy Systems, vol.18no. 2, pp.261 –
273, 2010.
[44] M., M.N., D. Costa, C.T. Barra, W. and B. J.A.L,”Identification, digital control and fuzzy logic techniques applied to a synchronous genera- tor,” IEEE Latin America Transactions,vol.7,no.2, pp.141 – 150 , 2009.
[45] S .H.Zak ,“Stabilizing fuzzy system models using linear control- ler,”Fuzzy Syst ,IEEE Trans ,1999.
[46] Prem Kumar P.I Kar and I Behera ,”Variable Gain controllers for
Nonlinear Systems Using T-S Fuzzy Model ,”IEEE Trans on SMC ,
2009 .
[47] Y. V. Hote, D. R. Choudhury, and J. R. P. Gupta,”Robust stability analysis of the PWM push-pull DC-DC converter,”IEEE Trans. Pow- er Electron,vol.24,no.10,pp. 2353–2357, Oct. 2009.
[48] T. Hu,”A nonlinear system approach to analysis and design of pow- er electronic converters with saturation and bilinear terms,” IEEE Trans.Power Electron, vol.26,no. 2,pp. 339–410, Feb. 2011.
[49] D. D.-C. Lu and V. G,” AgelidisPhotovoltaic-battery-powered DC bus system for common portable electronic devices,” IEEE Trans. Power Electron,vol. 24,no. 3,pp. 849–855, Mar. 2009.
[50] M.M.I. Chy and M.N. Uddin,”A Novel Fuzzy-Logic-Controller-
Based Torque and Flux Controls of IPM Synchronous Motor,” IEEE Trans onIndustrial Application, vol.46,no.3 , 2010.
[51] R. Toufouti, S. Meziane and H. Benalla,”New Direct Torque Neuro- Fuzzy Control Based SVM For Dual Two Level Inverter-Fed Induc- tion Motor,” CEAI Journal, vol.11,no.2,pp. 3-13,2009.
[52] H.A.Zarchi, J.Soltani and G.A.Markadeh, “Adaptive Input-Output Feedback Linearization Based Torque Control of Synchronous Reluc- tance Motor without Mechanical Sensor,” IEEE Transactions on In- dustrial Electronics, vol.57,January 2010.
[53] G. Foo and M.F. Rahman ,”Direct Torque and Flux Control of an IPM Synchronous Motor Drive using a Backstepping Approach”, IET Journal on Electric Power Applications,vol.3,no.5, 2009.
[54] S. Sayeef, G. Foo, and M.F. Rahman, “Rotor Position and Speed Es- timation of a Variable Structure Direct Torque Controlled IPM Syn- chronous Motor Drive at Very Low Speeds including Standstill,” IEEE Transactions on Industrial Electronics, Early access,2010.
[55] S.M. Fazeli, H.W. Ping, M.A. Rahman, J.Soltani and H.A.Zarchi,”A Modified DTC of Speed Sensorless IPMSM Drives Using Variable Structure Approach,”Taichung, Taiwan, the 5th International Con- ference on Industrial Electronics and Application (ICIEA), June 2010.
[56] H.A.Zarchi, J.Soltani and G.A.Markadeh, “Adaptive Input-Output Feedback Linearization Based Torque Control of Synchronous Reluc- tance Motor without Mechanical Sensor,” IEEE Transactions on In- dustrial Electronics, vol.57,January 2010.
[57] H.O.Wang K.Tanaka and M.F.Griffen ,”An Approach to fuzzy con- trol of nonlinear systems.Stability and Design Issuas,”IEEE Trans.Fuzzy Syst.vol. 4,1996.
[58] E.Kian and D.Kim ,”Stability analysis and syntheses for an Affine Fuzzy system via LMI and ILMI Discreate case ,” Syst.Man Cybern IEEE Trans, 2001 .
[59] H.K.Larn and F.H.F.Leung and Peter K.S.Tam.A,”Linear Matrix in-
qualty Approach for the control of uncerten Fuzzy Systems ,”IEEE
Control Systems Magazine , 2002.
[60] K.Tanaka , T.Ievade and H.O.Wang,”Fuzzy regulators and fuzzy observers Relaxed stability conditions and LMI-Based Designs ,”IEEE Trans.Fuzzy Syst.6,May 1998.
[61] E.Kain and H.Lee,”New approaches to relaxed quadratic stability condition of fuzzy control systems,”IEEE Trans .Fuzzy syst. Vol.8,Oct 2000.
[62] C.H Fang Y-S Liui.S-W Kau. I .Hong and C-H Lee,”A new LMI Based approach to Relaxed Quadratic Stabilization of T-S Fuzzy control systems ,”IEEE Trans. Fuzzy Syst . vol.14, June 2006.
[63] D. Giaouris, S. Banerjee, B. Zahawi, and V. Pickert,,”Stability analysis of the continuous-conduction-mode buck converter via Filip- pov’smethod,”IEEE Trans. Circuits Syst. I, Reg. Papers,vol. 55,no.4, pp.1084–1096,May 2008.
[64] D. Giaouris, S. Banerjee, B. Zahawi, and V. Pickert,”Control of fast scale bifurcations in power-factor correction converters,”IEEE Trans.Circuits Syst. II, Exp. Briefs,vol. 54,no.9, pp.805–809 , Sep.
2007.
[65] S. C. Tan, Y. M. Lai, I. Nagy, and C. K. Tse,”General design issues of sliding-mode controllers in DC–DC converters ,”IEEE Trans. Ind.Electron.,vol. 55,no. 3, pp.1160–1174, Mar. 2008.
[66] K. Guesmi, A. Hamzaoui, and J. Zaytoon,”Control of nonlinear phe- nomena in DC–DC converters: Fuzzy logic approach,” Int. J. Circuit Theory Appl., vol.36,no.7,pp. 857–874,Oct. 2008.
[67] K. Y. Lian, J. J. Liou, and C. Y. Huang,”LMI-based integral fuzzy control of DC–DC converters,” IEEE Trans Fuzzy Syst.,vol.
14,no.1,pp. 71–80, Feb. 2006.
IJSER © 2013 http://www.ijser.org