International Journal of Scientific & Engineering Research Volume 3, Issue 7, July-2012 1
ISSN 2229-5518
FUZZY LOGIC
ANTI-LOCK BRAKE SYSTEM
Author: Darshan Modi, Co-Author: Zarana Padia, Kartik Patel
ABSTRACT:
![]()
![]() Fuzzy logic introduction revolutionized the modeling of ABS. Now ABS Design has become much simpler due to the predesigned microcontrollers of Intel technology.
Fuzzy logic introduction revolutionized the modeling of ABS. Now ABS Design has become much simpler due to the predesigned microcontrollers of Intel technology.
![]() Simple Case Study: An Adaptive Fuzzy Air Conditioner
Simple Case Study: An Adaptive Fuzzy Air Conditioner
![]() Database systems are one of the mostly used sources of information that keep the vast amount of information. We have to be ab le to process and convert it into a form that meets the specific information needs. And this is a problem because the current search techniques use “real values” questions. The result is short or long list of objects which satisfy the conditions. This list i s to be re- evaluated unless is worthless. One of the possible solutions is to use fuzzy logic in searching databases.
Database systems are one of the mostly used sources of information that keep the vast amount of information. We have to be ab le to process and convert it into a form that meets the specific information needs. And this is a problem because the current search techniques use “real values” questions. The result is short or long list of objects which satisfy the conditions. This list i s to be re- evaluated unless is worthless. One of the possible solutions is to use fuzzy logic in searching databases.
INTRODUCTION:
Formal control logic is based in the teachings of Aristotle, where an element either is or is not a member of a particular set, L. A. Zadeh was one of those who investigated alternative forms of data classification. The result of this investigation was the introduction of fuzzy sets and fuzzy theory at the University of California Berkeley in 1965. Fuzzy logic, a more generalized data set, allows for a "class" with continuous membership gradations. This form of classification with degrees of membership offers a much wider scope of applicability, especially in control appl ications. fuzzy logic techniques have been applied to a wide range of systems, with many electronic control systems in the automotive industry, such as automatic transmission, engine control and antilock braking systems (ABSs) currently being pursued, particularly in the United States. Fuzzy Control, a relatively new, intelligent, knowledge based control technique performs exceptionally well in nonlinear, complex and even in not mathema tically describable systems. "If temperature is Hot and Time of Day is Noon then air conditioning equals very high." Several rules, similar to the example, could be used to describe a system and controlled response. The parameters of Hot, Time and Very High are defined by membership functions. As linguistic descriptions of a system are much easier to produce than complex mathematical models, fuzzy logic has great appeal for controlling complex systems as changes in the system have little if any effect upon the algorithm. The output of a fuzzy logic system is determined in one of several ways. The Center Of Gravity (COG) technique will be discussed in this paragraph. Once all rules are evaluated, their outputs are combined in order to provide a si ngle value that will be defuzzified. This output calculation is performed as follows. The control rule output value is multiplied b y its position along the X-axis, yielding position times weight for the rule. This calculation is repeated for all control rules. These position/weight products are combined to form the sum of products. This sum of the products is divided by the sum of output values to determine the COG output along the X-axis. COG is the final system output in a control algorithm.
MANUSCRIPT TITLE:
International Journal of Scientific & Engineering Research Volume 3, Issue 7, July-2012 2
ISSN 2229-5518
The reason for the development of antilock brakes is in essence very simple. Under braking, if one or more of a vehicle’s wheels
lock (begins to skid) then this has number of consequences:
a) braking distance increases.
b) steering control is lost
c) tire wear will be abnormal. The obvious consequence is that an accident is far more likely to occur. The application of brakes
generates a force that impedes a vehicles motion by applying a force in the opposite direction. During severe braking scenari os,
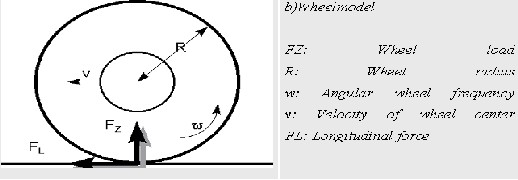
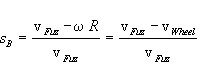
a point is obtained in which the tangential velocity of the tire surface and the velocity road surface are not the same. This term is referred to as slip ratio and is the ratio between the tangential velocity of the tire and the true ground speed of the vehicle and is expressed as: Vg is circumferential velocity of braked wheel and Vt is vehicle road speed. 0% is slip of free rolling wheel and
100% for locked wheel. The braking force or the adhesion coefficient of braking force (μf) measured in the direction the wheel is turning is function of slip. μf depends on a number
Vg is circumferential velocity of braked wheel and Vt is vehicle road speed. 0% is slip of free rolling wheel and 100% for locked wheel. The braking force or the adhesion coefficient of braking force (μf) measured in the direction the wheel is turning is function of slip. μf depends on a number of factors, and the main ones are:
a) road surface material condition
b) tire material, inflation pressure, tread depth, tread pattern and construction.
The aim of an ABS is to minimize brake distance while steer ability is retained even under hard braking. To understand the underlying physical effect which leads to wheel-blocking during braking, consider Figure 1a: Coefficient of friction is shown as a function of wheel slip.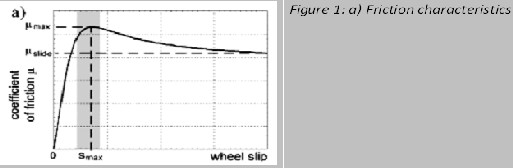
International Journal of Scientific & Engineering Research Volume 3, Issue 7, July-2012 3
ISSN 2229-5518
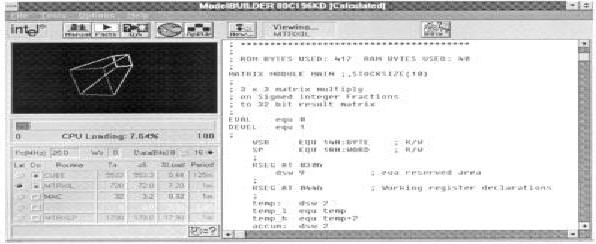
The development system, called fuzzy architecture. It contains: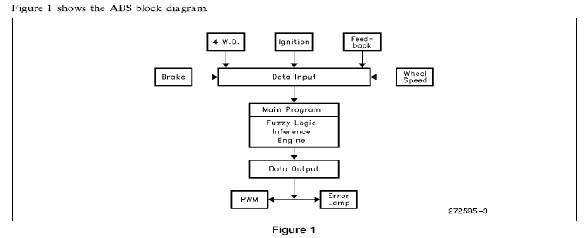
International Journal of Scientific & Engineering Research Volume 3, Issue 7, July-2012 4
ISSN 2229-5518
A fully graphical CASE tool that supports all design steps for fuzzy system engineering.
A simulation and optimization tool for fuzzy systems. This tool displays system performance and can be interfaced to conventional simulators to obtain performance data.
A code generator which generates complete C-Code for the fuzzy system. The C-Code calls optimized assembly routines on the target controller for fast performance.
The following table shows the performance of several test systems on a 20MHz 8XC196Kx device. All times shown are worst - case execution results. Note FAM rules are individually weighted as opposed to a system in which all rules have identical weight:
Table: Test System Performance:
7 Rules | 20 Rules | 20 FAM rules | 80 FAM rules |
2 in/ 1 out | 2 in/1 out | 2 in/1 out | 3 in/1 out |
0.22ms | 0.33ms | 0.34ms | 0.50ms |
The Fuzzy-Controller uses two input values: the wheel slip SB:
 and the wheel acceleration:
and the wheel acceleration: 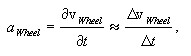
with wheel speed vWheel and vehicle speed vFuz, which is given by the Fuzzy-Estimator. The input variables are transformed in to fuzzy variables slip and dvwheel/dt by the fuzzification process. Both variables use seven linguistic values, the slip variable is described by the terms
slip = {zero, very small, too small, smaller than optimum, optimum, too large, very large}, and the acceleration dvwheel/dt by dvwheel/dt = {negative large, negative medium, negative small, negative few, zero, positive small, positive large}.
As a result of two fuzzy variables, each of them having seven labels, 49 different conditions are possible. The rule base is complete that means, all 49 rules are formulated and all 49 conditions are allowed. These rules create a nonlinear characteristic surface as shown in below Figure
International Journal of Scientific & Engineering Research Volume 3, Issue 7, July-2012 5
ISSN 2229-5518

Figure : fuzzy characteristic surface
Using this characteristic surface, the two fuzzy input values slip and dvwheel/dt can be mapped to the fuzzy output value pressure. The labels for this value are:
pressure = {positive fast, positive slow, zero, negative slow, negative fast}
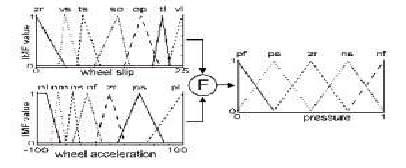
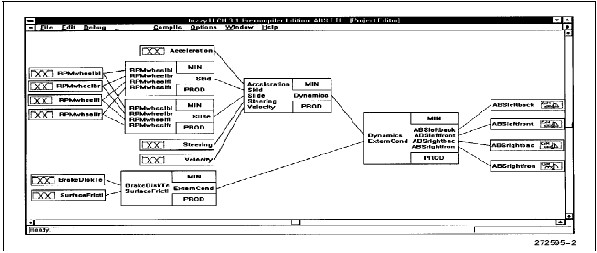
Figure structure of fuzzy ABS controller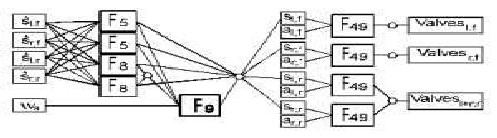
The optimal breaking pressure results from the defuzzification of the linguistic variable pressure. Finally a three-step controller determines the position of the magnetic valves, whether the pressure should be increased, hold firm or decreased. Figure summarizes the total amount of fuzzy calculations. Numbers within a rectangle indicate the quantity of fuzzy rules.
Figure fuzzy calculations
It should be noted that linguistic variables and rule tables can be designed with numerical optimization methods, for example described in [2]. In this work they were created using expert knowledge and analysis of measured data during ABS braking action. The fuzzy ABS controller uses the microprocessor SAB 80C166 together with the fuzzy coprocessor SAE 81C99A [3]. Due to the implementation of Fuzzy algorithms into the hardware of the coprocessor, the calculation speed of the host processor
International Journal of Scientific & Engineering Research Volume 3, Issue 7, July-2012 6
ISSN 2229-5518
increased significantly. While the control cycle time was set to a standard value of 7 msec, the computation time was only
0.5 msec! This offers facilities for implementation of extended vehicle dynamics control . The flexibility of the coprocessor is considerable, up to 64 rule bases are possible, each of them having up to 256 inputs and rules. Furthermore an interface to most commonly used microprocessors is available. Arbitrary shapes of membership functions, different defuzzification modes including “Center of Gravity", an enormous rule engine with up to 10 million rule calculations per second makes this device a very interesting product in the field of real time fuzzy control.
The basis of the controlling algorithm consists of a nonlinear characteristic surface, which was created by fuzzy logic. The convincing advantage of fuzzy logic is the ability to modify and tune certain parts of this characteristic surface easily and carefully. Just the linguistic rules or variables need to be varied. This simplifies the development and shortens the development time considerable.
Implementation of the fuzzy ABS leads to excellent results of braking behavior of the test vehicle. The deceleration level and steer ability is comparable to commercially available systems. The use of fuzzy-logic in conjunction with microcontrollers is a fairly new development in automotive applications. Intel is not currently aware of any projects in production for ABS applications, Fuzzy Sets and Systems is an excellent journal devoted to fuzzy logic and control systems based on fuzzy logic.
In Future it is expected that this technology of FUZZY ABS must be implemented in every part of the world. The usage of fuzzy ABS is almost implemented in countries like US, etc. But many companies are still expected to take part in implementation of Microprocessors/Microcontrollers like Intel for ABS to expand its usage. Implementation of Microprocessors that reduce the price but not mechanism is also expected in this procedure. Many scientists & Engineers are experimenting on above topics. However it is sure that we see no cars without Fuzzy Anti-lock Brake control in near future.
International Journal of Scientific & Engineering Research Volume 3, Issue 7, July-2012 7
ISSN 2229-5518
1. ``Mitsubishi Unveils New Gallant'',.
2. ``The ABS Race Is On'', Ward’s Auto world, May1989
3. Sudeendra kumar K., Leslin Verghese, K. K. Mahapatra
4. CHARLY GULLETT
5. DAVID ELTING and ROBERT KOWALCZYK
6. MOHAMMED FENNICH
7. BERT HELLENTHAL
[1] | Daiß, A. and Kiencke, U.: Estimation of Vehicle Speed - Fuzzy-Estimation in Comparison with Kalman-Filtering, 4th IEEE CCA, New York, 1995. |
[2] | Ostertag, M.: Strukturierte Optimierung technischer Prozesse am Beispiel der KFZ Crasherkennung, Institute for Industrial Information Systems, University of Karlsruhe, Ph. D. dissertation, 1996. |
[3] | Klein, R.: Realisierung einer Fuzzy-ABS-Regelung mit dem Mikrocontroller SAB 80C166 und dem Fuzzy-Coprozessor SAE 81C99A, Project work at the Institute for Industrial Information Systems, University of Karlsruhe, 1995. |
[4] | Daiß, A.: Beobachtung fahrdynamischer Zustände und Verbesserung einer ABS- und Fahrdynamikregelung, Institute for Industrial Information Systems, University of Karlsruhe, Ph. D. dissertation, 1996. |
International Journal of Scientific & Engineering Research Volume 3, Issue 7, July-2012 8
ISSN 2229-5518