International Journal of Scientific & Engineering Research, Volume 4, Issue 6, June-2013 2864
ISSN 2229-5518
FPGA based control system for Robotic
Applications
Khushbu Lalpuriya , N. Ravi Prakash, Naveen Rastogi
Abstract— Robotic applications are much more needed and almost mandatory requirement in today's fast moving industrial economy. In these circumstances the development of Robotics is also taking up the speed with the help of various technologies directly or indirectly suitable for robotic applications. FPGA takes advantage over microcontroller due to its hardware based parallel architecture which gives engineers much more flexibility and provides execution of the logic in parallel manner. Motors are one of the core part of the Robots and controlling them with FPGA is little tricky. FPGA based PW M signal generation method is used to control robotic applications. Code can be made in such a manner so that multiple parts (motors) can be controlled at a time. The ports availability also provides flexibility to extend the support for the number of motors or any Data acquisition mechanism. A user friendly interface is developed for easy controlling of robot.
Index Terms— controller, FPGA, interfaces, multiple motors, parallel architecture , PW M signal, robotic applications
—————————— ——————————
1 INTRODUCTION
In the fast growing world, real time controlling of any robotic application is very important. The idea behind developing the system is to make a single control system to control multiple robotic applications simultaneously because individual controller for every application is very difficult to synchronize and development of logic for every different application is also very time consuming. So the system is to be developed such that it can control any robotic application simultaneously in real time. Communication interfaces are also to be developed using which user can easily control any application. The whole control logic should be inside the system, so the selection of controller is important. It should be such that it contains large number of memory storage inside it, so more numbers of logics can be added within it.
For general applications, microcontroller is good enough but critical applications would need real-time processing that is time critical. In this case, FPGA would be the best solution. FPGA are used for time critical applications like real time multi motor control in robotic arms, any multi- motor precision application or any parallel processing application. In order to accomplish more work, more logic circuits can be added. FPGA get used 1specifically to do tasks a microcontroller cannot do efficiently, such as highly parallel or low latency operations, operating in multiple clock

• Khushbu Lalpuriya is currently pursuing masters degree program in VLSI and Embedded systems Design in Gujarat Technological University, India. E-mail: khushbu.modhia@gmail.com
• N. Ravi Prakash is currently Engineer in Institute for Plasma Research,
India. E-mail: prakashipr@gmail.com
• Naveen Rastogi is currently Engineer in Institute for Plasma Research, India.
E-mail: rastogi.ipr@gmail.com
domains, or doing custom logic at hardware speeds. For these all reasons, FPGA is used to develop a control system.
Spartan 3E FPGA board is used for system implementation. Xc3s500E chip is used inside the board. Kit contains 50 MHz clock oscillator, Two 9-pin RS-232 ports (DTE- and DCE-style) , up to 232 user-I/O pins, four-output SPI-based Digital-to-Analog Converter (DAC), two-input, SPI- based Analog-to-Digital Converter (ADC) with programmable-gain pre-amplifier. More details are given in datasheet of Xilinx Spartan3E user manual [2].
2 PROCESS FLOW

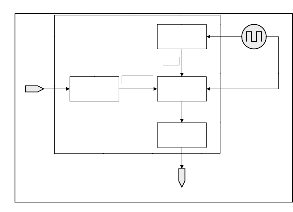
The main concept to build the system is to generate a logic inside FPGA for proper selection of address signal and data signal to control any kind of robots simultaneously in robotic applications. Conceptual process flow is shown in the figure below which contains the required basic blocks. These blocks are generated in Verilog language to load the logic in FPGA chip. The details of process flow is described below:
Fig. 1. FPGA based control system
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 6, June-2013 2865
ISSN 2229-5518
For ease of use, the data is sent from PC. For that, Serial interfacing is done which receives the data serially and convert it to 8 bit binary numbers. Received 8 bit binary numbers are stored in 8 bit latch. Here 8 bit latch is used to store the desired received data for further use. From 8 bit latched output, all bits are separated to access more number of ports using less control signal.
Input Signal
PWM Duty cycle Control
Duty Cycle
PWM Period control
20 ms
Up Counter
50 MHz
20 ns
From 8 bits of latch, 3 bits go into 3to8 decoder as a data and 4th bit enables that decoder. Likewise, other 3 bits go into the other 3to8 decoder as a data and 8th bit enables that decoder. Output of the decoder is used to enable PWM module for DC motor and other signals are the input control signals to drive the DC motor. Other decoder's output is used to enable the PWM module for Servo motor and other signals are the input control signals. PWM modules have separate logic for DC motors and Servo motors. As per the user input, it can change the values of respective signals.
Main modules of the control system are described in next two sections.
2.1 SERIAL INTERFACING VIA RS232 PROTOCOL
Whenever any robot is to be remotely controlled through the PC then serial interfacing is very important. In this experiment, to control the robot through PC, RS232 interfacing is done. Spartan 3E FPGA kit has on-board DTE and DCE DB9 port and RS232 voltage translator IC in the kit. The data signal is transmitted from PC and received by the FPGA chip using pin 2 and pin 3 of the DB9 connector respectively.
Every key pressing of PC represents particular ASCII values which is received by RS232 IC and it sends the data to the FPGA chip through voltage translator. FPGA has control logic of PWM signal generation module. So whenever respectively key is pressed through the keyboard, it will be received by FPGA chip and will be sent to robot from the digital I/O port. Any action/movement can be given to robot by changing just the logic in the FPGA. Using this concept, any robot can be controlled by FPGA through serial port of the computer .
2.2 PWM SIGNAL GENERATION MODULE
PWM is abbreviation of Pulse Width Modulation. It is also known as the duty-cycle variation method. This method is commonly used in speed control of motors. "Pulse” is meant by an electromagnetic wave or modulation. "Width Modulation” is meant by to adjust to or keep in proper measure or proportion the width of the pulse with respect to the frequency of the wave. The duty cycle is defined as the percentage of digital ‘high’ to digital ‘low’ plus digital ‘high’
pulse-width during a PWM period.
PWM Reg
PWM Signal
Fig. 2. Block diagram of PW M module
Fig. 2 shows the block diagram of PWM module which is developed inside the FPGA to drive the motor with the help of driver circuit. The architecture of the PWM part of the module consists of two registers, an up counter and on board clock. One of the two registers is to hold the PWM duty cycle value, which is the ratio of ON/OFF time determining the PWM waveform. The other register is to hold the PWM period data, which controls the duration of a complete ON/OFF cycle. The values in the two registers are accessible via serial interfacing and can be updated.
The up and down counters are used to count only when enabled and the Toggle flip flop toggles every time there is a final count from any of the enabled counters. When a data is loaded in the duty cycle register, the down counter begins to count down from high value to zero. When it crosses zero, the final count goes high, which toggles the PWM output to high. Every time the final count goes high it triggers the duty cycle value to be re-loaded and the Up-counter is enabled and the value is counted from zero to the high value. Once the Up- counter reaches the final count, it again triggers the flip-flop to toggle the PWM output. When a particular duty cycle value is loaded into the register, the PWM module will generate the corresponding PWM signal and send it through the on-board General Purpose Input Output (GPIO) pin. These PWM signals are then given to drive the motor.
2.3 INTERFACING VIA LABVIEW
To control the robotic application using GUI rather than using hyper terminal, LabVIEW and FPGA compatibility is also provided. By generating GUI in LabVIEW, it becomes easy to select the motor and also to control any action of motor. Logic is developed such that every selection from LabVIEW sends the data to FPGA and as per the selection, robot is controlled through single FPGA board.
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 6, June-2013 2866
ISSN 2229-5518

The simulation waveforms are measured with the help of simulation tool and the results show that as per the command given, signals can be properly selected and addressed to the particular output port with 40ns delay.
Fig. 3. Front panel to control motors
As shown in the front panel of LabVIEW, selection for DC motors and selection for servo motor is provided. Also the selection for direction in DC motor and angle for servo motor is provided.
3 IMPLEMENTATION
We have used Xilinx Spartan 3E board and Xilinx development tool ISE (Integrated Software Environment) to design the motor control logic using PWM module and conducted experimental test. PWM module is generated in Verilog language. The experimental test verified the functional correctness of the hardware module.
VCC GND
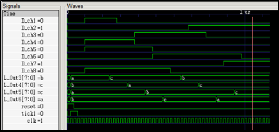
Fig. 5. Simulation result for multiple DC motor control
Output port of FPGA is connected to Digital Signal Oscilloscope before directly applying to motor. As shown in the waveform first two channels are for one DC motor which is in forward direction and last two are for second DC motor which is in reverse direction. Here medium speed is selected by applying 50% duty cycle.
Serial interfaces
PWM m odule GPIO
pins
Driver circuit
XC3s500E F PGA chip
Spartan 3E F PGA board
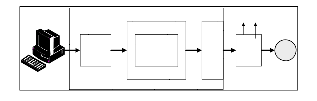
Fig. 4. Experimental Set up
Fig. 4 shows the overall system configuration of the experimental setup and the Spartan 3E FPGA board is the central piece with a PC and motor driver circuit attached. The board has a XC3s500E FPGA chip on it. The GPIO pins on the board are directly connected to the FPGA device. We have implemented the PWM module inside the FPGA chip in such a way that it can directly access the GPIO pins, and thus through the driver card, it drives motor. We use H-bridge circuit as DC motor driver circuit. The PWM outputs from the GPIO pins are fed into the H-bridge and then to drive a DC motor. During the experimental test, the PC is connected with the prototyping board via a serial communication link.
The FPGA designs are implemented using Verilog language in Xilinx ISE software, which provides a variety of performance analyses, including resource utilization, speed, and power consumption. The Xilinx performance report is based on simulations of the hardware design. The interconnection of PWM module with the FPGA chip has clock frequency of 50 MHz . However we can change the clock across various frequencies in simulation to investigate the effects on module performance. The timing analyzer of the ISE software provides accurate information on delays from various points, nets and pads inside the FPGA.
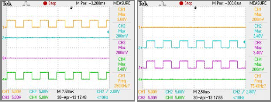
Fig. 6. Experimental waveform for DC motor logic
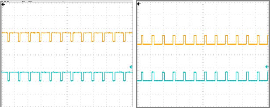
Fig. 7. Experimental waveform for DC motor control
As shown in the waveform, two DC motors are simultaneously driven from a applied logic in FPGA. Here logic is tested by applying different speed controls.
Module is tested with robotic application. Module is tested with DC motor to test the control of the speed and direction. From experiment, the speed of the motor is varied as per the command given from the PC and the direction is also controlled. The precise control of DC motor can be checked by taking feedback from the encoder attached on the wheel of the DC motor.
Module is tested with the servo motor to test the angle control. From experiment, the angle of the motor is varied as per the command given from the PC and the
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 6, June-2013 2867
ISSN 2229-5518
direction is also controlled. Angles of the robotic application with servo motors is tested as shown below:
Table 1 Experimental servo angles
Angle to be controlled | Required PWM signal |
0° | 1 ms |
45° | 1.25 ms |
90° | 1.50 ms |
135° | 1.75 ms |
180° | 2.00 ms |
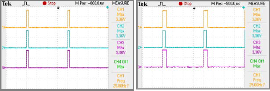
Fig. 8. Experimental waveforms for servo motor control
As shown in the first waveform, three servo motors are controlled at the same angle and in the second waveform, two motors are controlled at same angle and the third is at different angle.
4 CONCLUSION
In this paper, FPGA based real time control system is developed to control any type of motors in robotic applications. Addressing of control signals and sending data to particular signal are implemented in this paper. Hardware module is developed to generate PWM output pulses, which are the basic building blocks to drive robots. With the use of communication interfaces provided, all modules can be easily accessible. LabVIEW and FPGA interfacing was also successfully developed. Functional verifications are done by applying the logic on the robotic applications. This work was the prototype of a big system. So by taking advantage of FPGA, more number of logics can be added into the developed control system.
ACKNOWLEDGMENT
This work is carried out in Institute for Plasma Research as a part of Dissertation work of Master of Engineering under guidance of Mr. N. Ravi Prakash. I am very thankful to Institute for Plasma Research for giving me opportunity to work.
REFERENCES
[1] Samir Palnitkar, "Verilog HDL, A guide to digital design and synthesis", SunSoft press 1996
[2] Xilinx, "Spartan-3E FPGA Starter Kit Board User Guide",
UG230 (v1.2) January 20, 2011
[3] Narashiman Chakravarthy, Jizhong Xiao, "FPGA-based Control System for Miniature Robots" IEEE/RSJ International conference on Intelligent Robots and systems, October 9,2006
[4] National Instruments, "Pulse Width Modulation using NI- DAQmx and LabVIEW", May10, 2010
[5] Tim Bennett and Vincent Rosa, "Speed control of DC motor using Pulse width modulation", Data Acquisition and Control Systems, Spring 2009
[6] "Servo motors control & Arduino", Future Electronics
IJSER © 2013 http://www.ijser.org