International Journal of Scientific & Engineering Research, Volume 3, Issue 5, May-2012
ISSN 2229-5518
Expeditious Scheduling for Precedence
Constraint Tasks in Grid
Joshua Samuel Raj, Daphne.S and Dr. V. Vasudevan
Abstract— The tremendous potential of grid computing is efficient scheduling, to exploit the computationally intense problems. In the commonly used decentralized models, large scale scheduling implies time sequence constraints, which makes the models intractable. To resolve this constraint, disintegration and cyclic scheduling are often applied to such scheduling which is time consuming and introducing more complexities. The significance of this paper is marked by speed and efficiency that the task-resource mapping in such a non-deterministic computing environment leads to concerns over scheduling problem to minimize the expected makespan and delay in allocation of tasks thereby reduce the turnaround time for precedence-constraint tasks imposed by application tasks to identify suitable resources. Our rigorous performance evaluation shows that our variant Expeditious Matching algorithm generates schedules with smaller makespan and higher robustness compared with other existing approach gratuitous to the new enhancement.
Index Terms— Grid computing, Job scheduling, Resource Matching, Makespan.
—————————— • ——————————
1 INTRODUCT ION
rid computing is a geographically distributed com- puting that links virtual supercomputers of vast amount of computing capacity through the Internet
to solve complex problems from e-Science in less time than known before. In the past few years we have expe- rienced how Grid computing has achieved a break- through in physics, meteorology, medicine and other computing fields. Grid computing is a technology that enables resource virtualization, on-demand provisioning and large scale resource sharing. Examples of such large- scale applications are known from optimization, Colla- borative/e-Science Computing, Data-Intensive Compu- ting etc.
The purpose of job scheduling in this environment is to balance the entire system load while completing all the jobs at hand as soon as possible according to the envi- ronment status [1-3]. In general, the objective of task scheduling is to minimize the completion time of a paral- lel application by properly mapping the tasks to the pro- cessors. This paper describes about application models that are dependent and precedence-constrained. The problem of mapping (including matching and schedul- ing) tasks and communications is a very important issue since an appropriate mapping can truly exploit the paral- lelism of the system thus achieving large speedup and high efficiency [4]. It deals with assigning (matching) each task to a machine and ordering (scheduling) the execution of the tasks on each machine in order to mi- nimize some cost function. The most common cost func-
————————————————
• Daphne. S is with the Computer Science department, Karunya University, India. E-mail: daphnesam7@gmail.com
• R. Joshua Samuel Raj is with the Computer Science department, Karunya
University, India. E-mail: joshuasamuelraj@gmail.com
• Dr.V. Vasudevan is the Director, Software Technologies Lab, TIFAC Core in Network Engineering, Srivilliputhur, India
tion is the total schedule length, or makespan.
The rest of the paper is structured as follows: related works in section 2 which describes few decentralized based scheduling models. And in section 3 detailed de- scriptions about the proposed algorithm is given. Then in section 4 the experimental setup is given. And section 5 ends the paper with the conclusion and future work.
2 RELATED WORKS
In the classical approach, which is also called list scheduling [5, 6], the basic idea is to make an ordered list of nodes by assigning them some priorities, and then repeatedly execute the following two steps until a valid schedule is obtained. First select from the list the node with the highest priority for scheduling. Second select a processor to accommodate this node. The priorities are determined statically before the scheduling process be- gins. In Dynamic Critical Path (DCP) algorithm [7] ex- tends the list scheduling to avoid scheduling less impor- tant nodes before the more important ones, node priori- ties can be determined dynamically during the schedul- ing process. The priorities of nodes are re-computed after a node has been scheduled in order to capture the changes in the relative importance of nodes. However this can increase the complexity of the algorithm. The HEFT algorithm [8, 9] is an application scheduling algo- rithm for a bounded number of heterogeneous proces- sors, which has two major phases: a task prioritizing phase for computing the priorities of all tasks and a pro- cessor selection phase for selecting the tasks in the order of their priorities and scheduling each selected task on its best processor, which minimizes the task's finish time.
However, the problem is that if the queue is fully
IJSER © 2012 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 3, Issue 3, March-2012 2
ISSN 2229-5518
loaded and workload is heavy, tasks might have to wait in the queue for a very long time. In the extreme case, starvation might occur. The Fastest Processor to Largest Task First (FPLTF) [10] algorithm schedules tasks con- cordant to the workload in the grid system. The algo- rithm needs the selective information of CPU speed and
has specific precedence constraint for their execution.
Before presenting the objective function, it’s essential to define the expected finish time of task vi as Fi, CPU utilization Ui and average execution cost as ci of task vi on resources rj.
task workload. FPLTF works in two steps: one, the task scheduler sort’s tasks and cut down CPU searching time.
Expected finish time , Fi = w(vi)/p
(1)
Two, the scheduler assigns the largest task in the queue to the fastest feasible resource node in the grid. Dynamic Fastest Processor to Largest Task First (DFPLTF) [10, 11] is extended from FPLTF. WQR (Work Queue with Repli-
where w(vi) is the workload of the task vi and pi is the expected processing speed for the task vi.
noload(r )
cation) [12] is extended from the Work Queue (WQ) algo- rithm [13].
Idle time , Fi =
(2)
load(rj)
WQR has an attribute such that a faster processor will be assigning more tasks than a slower processor. In the min-min algorithm [14], the minimum completion time for each task is computed based on all the machines characteristics. The task which corresponds to overall minimum completion time is selected and assigned to the respective machine. The newly mapped task is dis-
where no_load(rj) is the average period of tasks with no
load on rj and load(rj) is the average period of tasks with
load on rj.
CPU utilization, Ui = total execution time − Fi (3)
L Fi ∗ csj
carded, and the process repeats until all tasks are allo-
cated with the resources. A schedule is considered effi-
Average execution cost , ci = /v
(4)
cient if the schedule length is short and the number of processors used is reasonable.
In real world problems with precedence constraints, for interpreting communication cost and processing time as random variables, stochastic grid parallel applications are considered by submitting users and generally inde- pendent of each other, which request systems services for their execution. The Stochastic Heterogeneous Earli- est Finish Time (SHEFT) [15] aims to schedule the tasks by assigning tasks to the machine that minimizes makes- pan. During scheduling, the unscheduled task in the task sequence is selected and scheduled on a machine that can complete its execution with minimize approximate earli- est finish time.
3 RESOURCE EXPEDITIOUS MATCHING
Generally, the scheduler assigns tasks to an appropri- ate resource node for execution, and the resource nodes with better performance would be assigned first. When task loading is heavy and all resource nodes with better performance are assigned, other tasks have to be as- signed to the resource nodes with inferior performance. Therefore, if a task is assigned to a resource node with- out considering the performance factor, the overall ex- ecution time will increase [10, 16]. To solve this problem, a scheduling algorithm that searches for the proper re- source for task execution based on the processing speed of resources and computation time of tasks is proposed.
In this section we present our resources Expeditious Matching (EM) method. Our proposal has two phases they are initialization and expeditious matching phase. Here we consider the bounded number of tasks which
where the computation cost per second on resources rj is
csj.
In the initialization phase, the characteristic of the resources like processing speed and computation time are analyzed based on the information stored in the Grid Information Service (GIS). It’s a repository that maintains and updates the details about the resources in the grid environment. The table 1 shows an example of the Esti- mated Resources Specification (ERS) table for resources and their corresponding processing speed, Pj and the average Resource computation Time (RCT) of resource j. The Estimated Resources Specification (ERS) table is up- dated in regular intervals of time to make sure that the values in the table are not outdated.
In the Expeditious Matching phase, the tasks are mapped to the available resources which are most ap- propriate for that task. The Expeditious Matching algo- rithm sorts the tasks based on the precedence constraints assigned.
TABLE 1
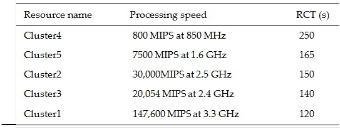
Estimated Resources Specification (ERS)

Initialization phase: Performed to analyze the computa-
IJSER © 2012 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 3, Issue 3, March-2012 3
ISSN 2229-5518

tional time of tasks, only when this scheduling algorithm is first executed.

1 For each resource in the grid
speed of resources rj, respectively.
RC( , i) = (W \ P)
(1 − UP)
(5)
2 Compute the average Resource Computa- tion Time (RCT) using (Eq. 5) based on the recent past history of the resource like processing speed, workload etc.
3 Update the repository (ERS) with the com- puted values.
4 Sort the resources in the decreasing order based on the RCT
5 End for

Expeditious Matching phase

1 Sort the tasks based on the precedence con- straint assigned
2 Do until there is any tasks in the queue
3 For each task vi
4 While vi is not assigned
5 If Pj has approximately equal processing speed required and available space for vi
6 If vi has expected finish time, Fi approx-
imately equal with the Resource Computa-
tion Time (RCT)
7 Perform the task and resource matching
8 End if
9 End if
10 If vi is not assigned to any of the resources
11 Perform the task and resource matching to the resource which has the least RCT value
12 End if
13 End while
14 For regular intervals of time, calculate the Resource Computation Time (RCT) based on the recent past history of the resource. And update the repository (ERS) with the com- puted values.
15 Sort the resources in the decreasing order based on the RCT
16 End for
Given that w(vi) = 20,054 million instructions and Pi
= 2.4 GHz then RCT is 140s. Table 1 lists the RCT value
for each cluster of resources.
The resources are mapped if and only if a resource has available space, approximately equal processing speed and approximately equal Resource computation Time which is expected for that task to execute.
Given a task with w(vi) = 20,540 million instructions and pi = 2.4 GHz then expected finish time, Fi as 100s.
From the values in table 1, we infer that the requirement
of the task do not match with any of the resource list. So if this kind of exceptional condition arises then the matching is done with the resource which has the least RCT value.
The pseudo code of a newly proposed scheduling al- gorithm is depicted in figure 1. The data in the Estimated Resources Specification (ERS) table is used to match the incoming tasks specification and the resource specifica- tion. And for regular intervals of time, calculate the aver- age Resource computation Time (RCT) based on the re- cent past history of the resource. There by update the repository (ERS) with the computed values and sort the resources in the decreasing order based on the RCT.
4 PERFORMANCE EVALUATION
In this section, we compare the performance of our Expeditious Matching (EM) algorithm with the well- known scheduling SHEFT [15] algorithm in Grid sys- tems.
We implemented our experiments by Grid Simulator [17], a java-based discrete event grid simulation tool kit. In the simulation, there are two phases.
The performances metric are makespan and schedul-
ing time ratio. Both the metric are essential and it’s ex- amined in this paper since smaller the schedule more efficient is the Grid system. The scheduling time ratio is computed by dividing the parallel execution time (i.e., the makespan of the output schedule) by the sequential execution time (i.e., cumulative execution time) as shown in Eq. 6.

Fig. 1. Pseudo-code of Expeditious Matching (EM) algorithm
Consider a task’s resource requirement is specified as
1 GHz. Directly assign this task to a node with 1 GHz
Scheduling time ratio =
makespan

.L actual execution time (vi )
(6)
processing speed is not good as the Resource Computa- tion Time of that resource varies. Therefore, we have to estimate the actual performance of an assignment using
RCT (Eq. 5). For a given task vi, define Wi as the esti- mated workload, pi as the processing speed requirement,
and Ui and Pj as the CPU utilization and processing
4.1 Experimental Results
In our simulation experiments, the number of tasks ranges between 500 to 4000 and 10 resource nodes are considered. Every set of tasks for the above parameters are generated based on the bounded number of tasks with the precedence constraint. The processing speed of resource node was assigned between the range 4000 to
IJSER © 2012 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 3, Issue 3, March-2012 4
ISSN 2229-5518
150,000 MIPS. Other parameter of the model is the failure rates of processors and links it’s assumed to be uniformly distributed between 1 * 10-3 and 1 * 10-4 failures/hour. In addition, the transmission rates of links are assumed to be uniformly distributed between 10 and 100 Mbits/s.
We infer from figure 2 that the EM outperforms SHEFT [15] in terms of the average makespan by 35% for the 4000 number of tasks. Thus the proposed Expeditious
Comparison of Scheduling Techniques
Matching algorithm shows efficiency when with SHEFT [15].
compared
From figure 3, we infer that the scheduling aver-
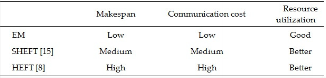
Our EM algorithm is the fastest than the SHEFT [15]
algorithm and HEFT [8] algorithm is the slowest one among the three, as shown in table 2. On average, the EM algorithm is faster than the SHEFT algorithm by 55 per- cent and the HEFT algorithm by 75 percent.
One of the reasons for efficient makespan is that, to avoid recalculating it for similar kind of recourses, we update the values and store them for further iterations. Then in task assignment, processing speed can be ob- tained by a simple table look-up instead of recalculating regarding all tasks.
age communication time of scheduler and resources of
the jobs in our algorithm have a minimal time when compared with the SHEFT algorithms courtesy to the fact that the recalculation of tasks is reduced drastical- ly.
5 CONCLUSION AND FUTURE WORK
In this paper, the major concern in the computing environment over scheduling is to minimize the expected makespan and delays in allocation of tasks thereby re- duce the turnaround time. Our algorithm schedules the tasks based on the best match of resource and tasks using the simple ERS table lookup instead of recalculating for all tasks with the precedence constraints. Thus the appli-

cation tasks identify suitable resources.
The updating of
the ERS table is expeditious based on recent history of the computation. Also our rigorous performance evalua- tion shows that our variant Expeditious Matching gene- rates schedules with smaller makespan and higher ro- bustness coupled with smaller scheduling time ratio compared with other existing scheduling approaches. In
the near future we plan to combine the
ntelligence of ant
Fig. 2. Performance of execution time ratio for 4000 scheduled jobs
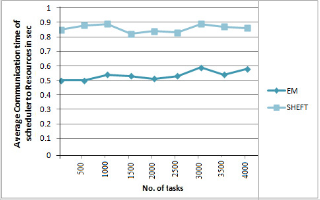
Fig. 3. Average Communication time of scheduler and Resources for 4000 scheduled jobs
TABLE 2
colony for scalability in the existing algorithm. The pro- cedure can also be suitably be modified and applied to any kind of Grid scheduling with different problem envi- ronment to optimize any number of objectives concur- rently.
REFERENCES
[1] J Katia Leal., Eduardo Huedo., Ignacio M. Llorente.: “A decen- tralized model for scheduling independent tasks in Federated Grids”. Future Generation Computer Systems 25 (8) (2009)
840–852.
[2] D. A. Reed.: “Grids, the TeraGrid, and Beyond”. IEEE Com- puter 36 (1) (2003) 62–68.
[3] J. Nabrzyski., J. M. Schopf., J. Weglarz.: “Grid Resource Man- agement: State of the Art and Future Trends”. Kluwer Aca- demic Publishers, 2003.
[4] J. Breckling., T. D. Braun., H. J. Siegel., N. Beck., L. Boloni., M.Maheswaran., A. I. Reuther., J. P. Robertson., M. D. Theys., B. Yao.:“A taxonomy for describing matching and scheduling heuristics for mixed-machine heterogeneous computing sys- tems. In Reliable Distributed Systems”, 1998. Proceedings. Se- venteenth IEEE Symposium on, pages 330–335, West Lafayette, IN, 1998.
IJSER © 2012 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 3, Issue 3, March-2012 5
ISSN 2229-5518
[5] G. Q. Liu., K. L. Poh., M. Xie.: “Iterative list scheduling for heterogeneous computing”. J. Parallel Distrib. Comput.,
65(5):654–665, 2005.
[6] H. Topcuoglu., S. Hariri., M. Wu.: “Performance-Effective and Low- Complexity Task Scheduling for Heterogeneous Compu- ting”. IEEE Trans. Parallel and Distributed Systems, vol. 13, no. 3, pp. 260–274, March 2002
[7] Y. K. Kwok., I. Ahmad.: “Dynamic critical-path scheduling: An effective technique for allocating task graphs to multipro- cessors”. IEEE Trans. Parallel Distrib. Syst., 7(5):506–521, 1996.
[8] G. C. Sih., E.A.Lee.: “A compile-time scheduling heuristic for interconnection constrained heterogeneous processor architec- tures”. IEEE Trans. Parallel Distrib. Syst., 4(2):175–187, 1993.
[9] Radulescu., A. J. C. Van Gemund.: “Fast and effective task scheduling in heterogeneous systems”. In HCW ’00: Proceed- ings of the 9th Heterogeneous Computing Workshop, page
229, Washington, DC, USA, 2000. IEEE Computer Society.
[10] D. Saha., D. Menasce., S. Porto, et al., “Static and dynamic processor scheduling disciplines in heterogeneous parallel ar- chitectures”, Journal of Parallel and Distributed Computing 28 (1) (1995) 1–18.
[11] D. Silva., W. Cirne., F. Brasileiro.: “Trading cycle for informa- tion: using replication to scheduling bag of tasks application on computational grids”, in: Proceeding in Ruro-Par, August
2003.
[12] S. Wang., I. Hsu., Z. Huang.: “Dynamic scheduling method for computational grid environments”, in: Proceedings of the In- ternational Conference on Parallel and Distributed Systems, July 2005, pp. 22–28.
[13] Matei Ripeanu.: “Peer-to-peer architecture case study: Gnutella network”, in: Proceedings First International Conference on Peer-to-Peer Computing, August 2001, pp. 99–100.
[14] M. Maheswaran., S. Ali., H. Siegel., D. Hensgen,, Richard F.
Freund.: “Dynamic mapping of a class of independent tasks onto heterogeneous computing systems”, Journal of Parallel and Distributed Computing 59 (1999) 107–131.
[15] X. Tang., K. Li., G. Liao., R. Li.: “A stochastic scheduling algo-
rithm for precedence constrained tasks on Grid”. J.future gen- eration computer sys. 2011.04.007.
[16] Ruay-Shiung Chang., Chun-Fu Lin., Jen-Jom Chen.: “Selecting the most fitting resource for task execution”. Future Genera- tion Computer Systems., 27 (2011) 227–231

[17] Anthony Sulistio., Uros Cibej., Srikumar Venugopal., Borut Robic., Rajkumar Buyya.: “A Toolkit for Modelling and Simu- lating Data Grids: An Extension to GridSim, Concurrency and Computation: Practice and Experience (CCPE)”, Wiley Press, New York, USA, Sep.2008.

Name:
R. Joshua Samuel Raj
Affiliation:
Assistant Professor / CSE Karunya University
Brief Biographical History:
2005 -Graduated in 2005 from the Computer Science and Engineer- ing Department from PETEC under Anna University
2007 -Received M.E Degree in Computer Science and Engineering from Jaya College of Engineering under Anna University
2009 Working towards the Ph.D degree in the area of Grid schedul- ing under Kalasalingam University
Main Works:
Grid computing, Mobile Adhoc Networking, Multicasting and so forth.


Name: Daphne.S
Affiliation: PG Scholar Karunya University
Brief Biographical History:
2010 -Graduated in Computer Science and Engineering Department from Karunya University
2012 - pursuing her M.Tech in Computer and Communication Engi- neering from the department of Computer Science in Karunya Uni- versity
Main Works:
Grid computing, Networking and so forth.


Name:
V. Vasudevan
Affiliation:
Director, Software Technologies Lab, TIFAC Core in Network Engineering,
Srivilliputhur, India
Brief Biographical History:
1984- M.Sc in Mathematics and worked for several areas towards
Representation Theory
1992 Received his Ph.D. degree in Madurai Kamaraj University
2008- the Project Director for the Software Technologies Group of TIFAC Core in Network Engineering and Head of the Department for Information Technology in Kalasalingam University, Sirivilliputhur, India
Main Works:

Grid computing, Agent Technology, Intrusion Detection system, Multicasting and so forth.
IJSER © 2012 http://www.ijser.org