International Journal of Scientific & Engineering Research, Volume 5, Issue 7, July-2014 121
ISSN 2229-5518
Enhancement of Digital Images by Combinational
Neuro-Fuzzy Logic
Vishwajeet Kumar, Anupriya Asthana, Rashmi Kumari, M.Rahman
Abstract— Combinational Neuro-Fuzzy (NF) logic is the mixed technique generated by the combination of artificial neural network and fuzzy-logic. Various methods are proposed in the literature to restore the image degraded by impulse noise using soft computing technique where all methods have their own advantages and disadvantages. A novel idea is proposed in this paper where the ANFIS is used to detect the impulse noise and mean of the median of 3x3 window of noisy image is taken for the removal process. Experimental result shows the effectiveness of the proposed method by visual illustration and quantitative analysis.
Index Terms— Image processing, Fuzzy logic, Neural Network, ANFIS, Fused Neuro-Fuzzy Logic, Impulse Noise, Nonlinear Filters
—————————— ——————————
MAGES are usually degraded by noise during image acqui- sition and transmission process. The main purpose of the noise reduction technique is to remove impulse noise by retaining the important feature of the images. Noise occurs in the images when the pixels are randomly failed and replaced by other values in an image. The image model containing im-
pulse noise can be described as:
mapping and adaptive ability for visual image processing [9]. Monireh has reviewed the application of ANFIS as a classifier in medical image classification [10]. Training procedure of neural network for resolving problems related to medical im- aging is analysed by J.Jiang [11]. A novel adaptive neuro- fuzzy inference system (ANFIS) is proposed by Jhang for edge detection in digital images [12]. Saenko et al. has used fuzzy technique for image enhancement and image quality analysis
N ij ,
X ij =
with probability p
[13]. The role of the fused neuro-fuzzy system is attracting
S ij , with probability 1 − p
Where, Sij represents the noiseless image pixel and Nij rep- resents the noise substituting for the original pixel. The fixed and random-valued impulse noises are mostly discussed in a variety of impulse noise models for images. Fixed-valued im- pulse noise, known as the “salt-and-pepper” noise, is made up of corrupted pixels whose values are replaced with values equal to the maximum or minimum (255 or 0) of the allowable range with equal probability (p/2). The random-valued im- pulse noise is made up of corrupted pixels whose values are replaced by random values uniformly distributed in the range within [0, 255]. The noise removal nonlinear filtering tech- niques tend to blur fine details and destroy edges while re- moving corrupted pixels. To overcome these issues several modifications have been applied in conventional filtering techniques [1]-[5].
In recent arena, research is growing in the field of digital image processing with conjunction of soft computing tech- nique. Fusion of Adaptive Neural Network (ANN) and Fuzzy Inference System (FIS) (such as ANFIS) is frequently applied by researchers in various scientific and engineering research areas to solve real world problems. When the classic tech- niques are not sufficient to produce an easy and accurate solu- tion these two techniques: neural networks and fuzzy logic are applied many times together to the problems in digital image processing [6]-[8]. As both paradigms have their own ad- vantages, so it is a good idea to combine their ability and make a strong tool to solve complex problems.
Suo et al. discussed few advantages of neural network technology such as parallel calculating abilities, nonlinear
researchers due to the significant enhancement in results over
traditional methods.
A combinational neuro-fuzzy filter is proposed in this pa- per where fused NF logic is used to detect the impulse noise and a mean of the median of the window size is used to re- store the noisy image. This paper is organized as section II describes the working of neuro-fuzzy model; section III con- tains the description of the proposed model. Experimental results are shown in section IV which shows the significant improvement over the traditional method.
Neuro-fuzzy systems are those fuzzy systems which are based on Artificial Neural Network (ANN) theory in order to determine their properties by processing data samples. ANNs have greater predictive power than signal analysis techniques and Fuzzy set theory plays an important role in dealing with uncertainty. Neuro-Fuzzy can be defined as a type of system where the fuzzy sets and rules are adjusted using neural net- work techniques in iterative manner with the set of pair of input and output data vectors. The combination of Fuzzy In- ference System (FIS) and ANN can be classified into three cat- egories as:
(a) Concurrent Neuro-Fuzzy model (b) Cooperative Neuro-Fuzzy model (c) Fully Fused Neuro-Fuzzy model
In Concurrent model the neural network and the fuzzy sys- tems work together continuously to determine the required parameters specially if the input variables of the controller cannot be measured directly. A Cooperative model can be considered as a preprocessor wherein the artificial learning mechanism determines the fuzzy inference system member-
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 7, July-2014 122
ISSN 2229-5518
ship functions or fuzzy rules from the training data. In Fully Fused Neuro-fuzzy model, neural network learning algo- rithms are used to determine the parameters of fuzzy infer- ence system.
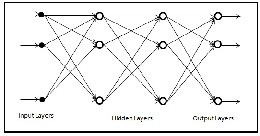
The ANN can be viewed as weighted directed graphs in which artificial neurons are nodes and directed edges are con- nections between neurons. It is an information processing sys- tem, which analyses data by passing it through several simu- lated processors. By designing training algorithms we can ad- just the weights of ANN in order to obtain the desired output from the network. The backpropagation algorithm is used in layered feed-forward ANNs. Artificial neurons send their sig- nals “forward”, and the errors are propagated backwards. The network receives inputs by neurons in the input layer, and the
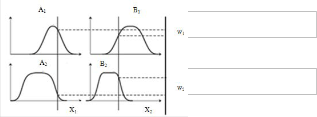
Fuzzy Inference Systems (FIS) are also known as fuzzy- rule based systems, fuzzy models, fuzzy associative memories (FAM), or fuzzy controllers when used as controllers. A fuzzy inference system is composed of a set of fuzzy if – then rules, a database containing membership functions of linguistic labels, and an inference mechanism called fuzzy reasoning. A rule base consisting of two fuzzy if- then rules of Takagi and Sugeno’s type is:
Rule 1: If x1 is A1 and x2 is B1, then f1 = a1x1 + b1x2 + c1, Rule 2: If x1 is A2 and x2 is B2, then f2 = a2x1 + b2x2 + c2,
This fuzzy reasoning mechanism is illustrated in Fig.2 where the firing strength (or weight) of ith rule is obtained as T norm (usually multiplication or min. operator) of the membership values on the premise part.
wi = m A ( x1 )m B ( x2 ), or
output of the network is given by the neurons on an output layer, the difference between actual and expected results is calculated. There may be one or more intermediate hidden
i
= min{m
i
i
( x1 ), m B
( x2 )}
layers. The idea of the backpropagation algorithm is to reduce this difference, until the ANN learns the training data. The backpropagation algorithm uses supervised learning and the training begins with random weights. Since the time for train- ing the network grows exponentially therefore for practical reasons ANNs implementing the backpropagation algorithm do not have too many layers [14].
f1=a1x1+b1x1+c1
f2=a2x2+b2x2+c2
Fig.2. Fuzzy reasoning
The overall output can be chosen either as the weighted sum of each rule’s output.![]()
f ( x) = ∑ R w f ,
Or the weighted average![]()
∑ R w f
f ( x) = i =1 i i ,
R
i =1 i
Fig.1 Standard three-layer feed-forward network architecture
Where R is the number of fuzzy if- then rules. Thus, the over- all weighted output f in terms of consequent parameters (a, b, c) will be-
Fuzzy sets and fuzzy sets operations are the subjects and verbs of fuzzy logic. If-Then rule statements are used to for-![]()
w1
= w1 + w2
f1 +
![]()
w2 f w1 + w2
![]()
mulate the conditional statements that comprise fuzzy logic.
Fuzzy if-then rules or fuzzy conditional statements are expres- sions of the form IF A THEN B, where A and B are labels of fuzzy sets characterized by appropriate membership functions [15]-[17]. Fuzzy Rules can be categorized into two types:
1) Fuzzy Mapping Rules- It describes a functional mapping relationship between inputs and an output using linguis- tic terms
2) Fuzzy Implication Rules- It describes a generalized logic implication relationship between two logic formula in volving linguistic variable and imprecise linguistic terms.
= w1 (a1 x1 + b1 x2 + c1 ) + w2 (a2 x1 + b2 x2 + c2 )
![]()
![]()
![]()
![]()
![]()
![]()
= (w1 x1 )a1 + (w1 x2 )b1 + (w1 )c1 + (w2 x1 )a2 + (w2 x2 )b2 + (w2 )c2
ANFIS implements a Takagi–Sugeno fuzzy inference sys- tem and has a five layered architecture as shown in Fig.3. Backpropagation learning method is used to determine the input membership parameters and for determination of con- sequent parameters, least mean square method is used [18].
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 7, July-2014 123
ISSN 2229-5518
Detailed analyses of different layers of Adaptive network
∑ wi fi
are as follows:
O5,1
= ∑ wi fi =
i
![]()
i
∑ wi
i
Layer 1:
O1,i
is the output of the ith node of the layer l.
Every node i in this layer is an adaptive node with a node function
O 1,i = m A ( x) for i = 1, 2 or
O1,i
= m Bi − 2
( x) for i = 3,4
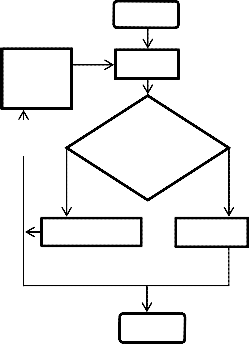
In this proposed model, to preserve the important fine details and due to uncertainty in impulse noise ANFIS is used for
x (or y) is the input node i and Ai (or Bi−2) is a linguistic label associated with this node. Therefore O1,i is the member- ship grade of a fuzzy set (A1, A2, B1, and B2).
Layer 2: Every node in this layer is a fixed node labelled
Prod. The output is the product of all the incoming signals.
detection of noise where three input parameters are used to
train ANFIS network. The output of ANFIS indicates the pres-
ence of impulsive pixel. The 3x3 sliding window has taken
into consideration where the centre pixel is noisy one. To re-
duce the extreme values of impulsiveness the mean of the me- dian of the window has taken into account and the corrupted pixel is replaced by this estimated value whereas the uncor-
O2,i
= wi
= m ( x).m
i i
( y), i = 1, 2
rupted pixel is left unchanged. Flowchart for proposed model
Each node represents the fire strength of the rule. Any oth- er T-norm operator that perform the AND operator can be
is depicted in Fig.4.
used.
Layer 3: Every node in this layer is a fixed node labelled
Norm. The ith node calculates the ratio of the ith rulet’s firing
i (x, y ) =
mean (median (w)) ,
n ( x, y) ,
if pixel is corrupted
if pixel is uncorrupted
strengths to the sum of all rulet’s firing strengths.![]()
w i
![]()
Where, i(x, y) is representing image pixel of recovered image and n(x, y) is the pixel value of noisy image.![]()
O3,i = wi =
w1 + w2
, i = 1,2
START
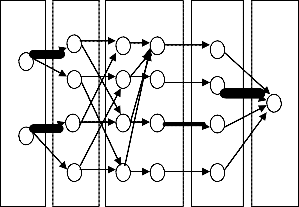
Outputs are called normalized firing strengths.
In- put
X1
X2
IF Part
A1
A2
B1
Rules + Norms
THEN- Part
Out- put
∑
MOVING TO NEXT 3X3
BLOCK
YES
MASKING
NOISE DETECTION BY FUSED NEURO- FUZZY LOGIC
NO
B2 MEAN (MEDIAN (W)) NO CHANGE
Fig.3 Adaptive Network Representation
Layer 4: Every node i in this layer is an adaptive node with a node function:![]()
![]()
O4,i = wi f i = wi (ai x + bi y + ci )
STOP
Fig.4 Flowchart for Proposed Model
In the above flowchart ‘w’ is representing a window size of
Layer 5: The overall output
layer as:
O5,i is calculated in this last
3x3 with center pixel corrupted by impulse noise.
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 7, July-2014 124
ISSN 2229-5518
The experiment has been performed on various test images on
software MATLAB. Results are shown in Table I and Table II in terms of PSNR and MSE value at different noise densities respectively. Table III shows the comparison of the PSNR val- ue with the traditional mean and median fiter. Fig. 5, Fig. 6 and Fig. 7 show the graphical representation of the measured parameters.
TABLE I. PSNR VALUE AT DIFFERENT NOISE DENSITIES
TABLE III.PSNR COMPARISON WITH OTHER FILTERS
Image | 10% | 20% | 30% | 40% | 50% |
Lena | 27.35 | 24.48 | 22.02 | 20.08 | 18.19 |
Coin | 27.96 | 24.38 | 21.96 | 19.71 | 17.36 |
Cameraman | 26.62 | 23.84 | 21.44 | 19.31 | 17.62 |
Pirate | 30.03 | 26.41 | 23.83 | 21.43 | 19.25 |
Moon | 29.09 | 25.78 | 22.73 | 19.99 | 17.28 |
Fig.5 Graphical representation of PSNR value at different noise density
TABLE.II. MSE VALUE AT DIFFERENT NOISE DENSITIES
Image | 10% | 20% | 30% | 40% | 50% |
Lena | 119.74 | 231.60 | 408.70 | 638.86 | 986.49 |
Coin | 103.10 | 237.26 | 413.81 | 694.65 | 1.1934e+003 |
Cameraman | 141.54 | 268.84 | 466.65 | 762.40 | 1.1236e+003 |
Pirate | 64.55 | 148.77 | 269.30 | 467.75 | 773.5779 |
Moon | 80.18 | 171.70 | 346.59 | 652.40 | 1.2151e+003 |
Fig.6 Graphical representation of comparative value of MSE value and
Noise density for different images.
Fig.7 Comparitive representation of PSNR values of 3 filters.
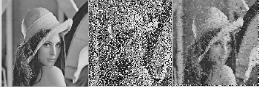
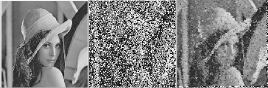
At 50% noise density proposed model filter is showing recog- nizable better PSNR value than median & mean filters. This proposed filter is tested at different noise densities on stand- ard Lena Gray image. The original, noisy and recovered imag- es are shown in Fig.8.
Original Images Noisy Images Recovered Images

(a)

(b)
(c)
IJSER © 2014 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 5, Issue 7, July-2014 125

ISSN 2229-5518




(d) (e) (f) (g)
(h)
(i)
(j)
Fig.8 Proposed noise removal filter output for Lena image corrupted by (a)5% (b)10% (c)15% (d)20% (e)25% (f)30% (g)35% (h)40% (i)45% (j)50% noise densities.
In this proposed model a novel two step process is involved where ANFIS is providing the information about the corrupt pixel while preserving the edge details. A combinational mean of median filter is applied to those corrupted pixels and the results obtained are better for grayscale images as compared to traditional method over high density noise.
[1] C. S. Lee, Y. H. Kuo, and P.T. Yu , “Weighted fuzzy mean filters for image processing,” Fuzzy Sets Syst., vol. 89, pp. 157-180, Jul. 1997.
[2] C. S. Lee, Y. H. Kuo, “Adaptive fuzzy filter and its application to image enhancement,” in Fuzzy techniques in Image Processing , I edition E. E. Kerre and M. Nachtegael , Eds. , Heidelberg, germany: Physica Verlag, vol. 52, pp. 172-193., 2000
[3] H.Xu, G. Zhu, H. Peng, D. Wang , “Adaptive fuzzy switching filter for images corrupted by impulse noise ,” Pattern Recognit. Lett., vol.
25 , pp 1657-1663, April 2004
[4] J. C. Sheng Y. J. Runtao, “Fuzzy weighted average filter” In Proc.
ICSP 2000, pp. 525-528, 2000
[5] Soon Ting Boo, H. Ibrahim, Kanny Kol Vin Toh, “An Improved Pro- gressive Switching Median Filter”, IEEE Intenational conference on future computer and communication, Malaysia , 2009.
[6] M E. Yuksel and A. Bas,turk, "Efficient removal of impulse noise from highly corrupted digital images by a simple neuro-fuzzy opera- tor," Int. J. Electron. Commun., vol. 57, no. 3, pp. 214 219, 2003.
[7] M E. Yuksel and A. Bas,turk, "A simple generalized neuro-fuzzy operator for efficient removal of impulse noise from highly corrupted digital images," Int. J. Electron. Commun., vol. 59, no. 1, pp. 1-7, 2005.
[8] ME. Yuksel and M T. Yildirim, "A simple neuro-fuzzy edge detector for digital images corrupted by impulse noise," Int. J. Electron. Commun., vol. 58, no. l,pp. 7/-75,2004.
[9] SuoYishuang, Huanping Hong; Chen Gang, “Research on the Visual Image Processing Based on Neural Network”, Computer Modeling and Simulation, ICCMS '10. Second International Conference, IEEE Xplore, pp.22-24, Jan. 2010
[10] Monireh Sheikh Hosseini and Maryam Zekri, “Review of Medical Image Classification using the Adaptive Neuro-Fuzzy Inference Sys- tem”, J Med Signals Sens.,pp.49-60, Jan-Apr 2012.
[11] J. Jiang, P. Trundle∗, J. Ren, “Medical image analysis with artificial
neural networks” Computerized Medical Imaging and Graphics, pp.
617-631, 2010.
[12] Lei Zhang; Mei Xiao ; Jian Ma ; HongXun Song, “Edge Detection by Adaptive Neuro-Fuzzy Inference System”, Image and Signal Pro- cessing, CISP '09. 2nd International Congress, IEEE Xplore, pp 17-19, Oct. 2009
[13] Saenko, A. ; Polte, G. ; Musalimov, V. “Image enhancement and im- age quality analysis using fuzzy logic techniques”, Communications (COMM), 9th International Conference, IEEE xplore, pp. 21-23, June
2012
[14] Anil K.Jain, Jianchang Mao, “Artificial Neural networks: A Tutorial”, IEEE, Computer, March, 1996.
[15] L.A. Zadeh. “Fuzzy sets”, Information and Control, 8, 1965.
[16] John Yen, Senior Member, “Fuzzy Logic - A Modern Perspective”, IEEE, October 20, 1998.
[17] Siddique, “Fuzzy Relations”, Computational Intelligence: Fuzzy relations, rules, and inference, Aug, 2010.
[18] Jyh-Shing Roger Jang, “ANFIS-Adaptive network based fuzzy infer- ence system”, IEEE Transaction on System, Man and Cybernetics, Vol. 23, No. 3, May/June, 1993.
IJSER © 2014 http://www.ijser.org