The research paper published by IJSER journal is about Design of Optimal Fractional Order PIDController using Genetic Algorithm and PSO Algorithm 1 1
ISSN 2229-5518
Design optimal Fractional PID Controller for DC Motor with Genetic Algorithm
Mehdi Yousefi Tabari, Dr. Ali Vahidian Kamyad
Abstract— An intelligent optimization method for designing Fractional Order PID (FOPID) controller's base Genetic Algorithm (GA) ear presented in this paper. Fractional calculus can provide novel and higher performance extension for FOPID controllers. Howeve r, the difficulties of designing FOPID controllers increase, because FOPID controllers append derivative order and integral order in co mparison with traditional PID controllers. To design the parameters of FOPID controllers. Experimental results show the proposed design method can design effectively the parameters of FOPID controllers.
Index Terms— Genetic Algorithm; Fractional order PID; fractional calculus; PID control; DC Motor.
—————————— ——————————
1 INTRODUCTION
ractional order control systems are described by fractional order differential equations. Fractional calculus allows the derivatives and integrals to be any real number. The FOPID controller is the expansion of the conventional PID controller based on fractional calculus. FOPID controllers’ parameters designed have five, and the derivative and integral orders im-
prove the design flexibility.
1.1 FRACTIONAL CALCULUS
ℒ{D f(t)} = s F(s) − [D f(t = 0)] (4)
Where f(s) is the Laplace transform of f(t) The Laplace trans-
form of the fractional integral of f(t) is given as follows:
ℒ{D f(t)} = s F(s) (5)
1.2 FRACTIONAL ORDER CONTROLLERS
The differential equation of fractional order controller PI D

There are several definitions of fractional deriva 1
[1].
is described by [2]:
Grunwald-Letnikov definition is perhaps the best known one
due to its most suitable for the realization of discrete control
algorithms. The m order fractional derivative of continuous function f(t) is given by:
u(t) = K e(t) + K Dt e(t) + K Dt e(t) (6)
The continuous transfer function of FOPID is obtained
through Laplace transform, which is given by:
[ ]
D f(t) = lim h ∑(−1) (
m
) f(t − jh) =
j

d f(t)
dt
(1)
u(t) = K e(t) + K Dt e(t) + K Dt e (7)
G (s) = K + K st + K st (8)

Where[x] is a truncation and x = t ; ( ) is binomial
coefficients,
m
( j )
m
m(m − 1) … (m − j + 1)

(2)
j!
( j ) = 1, (j = 0) , it can be replaced by Gamma function,

( ) = ( )
! ( )
The general calculus operator, including fractional order
and integer, is defined as:
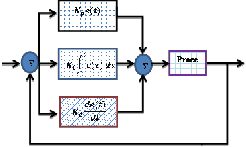
Fig. 1. Generic closed loop control system
With a PID controller
� = {

𝑅(𝛼) > 0
1 𝑅(𝛼) > 0

(3)
∫ (�𝜏) 𝑅(𝛼) > 0
————————————————
Mehdi yousefi tabari, Department of control engineering Islamic
Azad University, Gonabad Branch, Iran
E-mail: mehdi.yt61@gmail.com
Dr. Ali vahidiyan kamyad, Department of control engineering Is- lamic Azad University, Gonabad Branch, Iran
IJSER © 2012
Fig. 2. Generic closed loop control system
With a FOPID controller
http://www.ijser.org
The research paper published by IJSER journal is about Design of Optimal Fractional Order PIDController using Genetic Algorithm and PSO Algorithm 2 2
ISSN 2229-5518
It is obvious that the FOPID controller not only need design
three parameters,KpKi and, Kd but also design two orders, λ, δ
of integral and derivative controllers. The orders , λ δ are not
necessarily integer, but any real numbers. As shown in Fig.3
the FOPID controller generalizes the conventional integer or-
der PID controller and expands it from point to plane. This
expansion could provide much more flexibility in PID control design. [3]
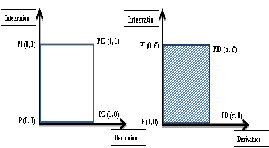
Fig. 3. PID controllers with fractional orders
2 MODEL OF DC MOTOR
DC machines are characterized by their versatility. By means of various combinations of shunt-, series-, and sepa- rately-excited field windings they can be designed to display a wide variety of volt-ampere or speed-torque characteristics for both dynamic and steady-state operation. Because of the ease with which they can be controlled systems of DC machines have been frequently used in many applications requiring a wide range of motor speeds and a precise output motor con- trol [3,4].
In this paper, the separated excitation DC motor model is
chosen according to his good electrical and mechanical per-
formances more than other DC motor models. The DC motor is driven by applied voltage. Fig.4 show the equivalent circuit
of DC motor with separate excitation. The Symbols, Designa- tions and Units are publicized in Table 1.
The characteristic equations of the DC motor are repre- sented as:
TABLE1
SYMBOLS, DESIGNATIONS AND UNITS
Symbols | Designations | Units |
iexandiend | Excitation current and Induced current. | [A] |
wr | Rotational speed of the DC Motor. | [Rad/Sec] |
Vexand Vind | Excitation voltage and Induced voltage | [Volt] |
Rexand Rind | Excitation Resistance and Induced Resistance. | [Ω] |
Lex,Lindan d Lindex | Excitation Inductance Induced Inductance and Mutual Inductance. | [mH] |
J | Moment of Inertia. | [Kg.m2] |
Cr | Couple resisting. | [N.m] |
fc | Coefficient of Friction. | [N.m.Sec/Rad ] |
From the state equations (1), (2), (3) previous, can construct the model with the environment MATLAB. The model of the DC motor in Simulink is shown in Fig. 5. The various parame- ters of the DC motor are shown in Table 2.
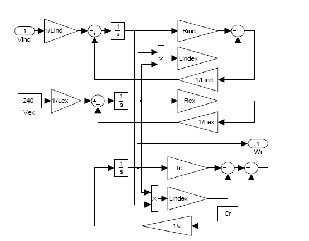
Fig.5: Model of the DC Motor in Simulink


� 𝑅
� = (−
� 𝑅

1
) + (
) (1)
1
TABLE 2 .PARAMETERS OF THE DC MOTOR

� = (−
�



) + (− ) + (
�𝑟
) (2)
−𝑓�

� = (−

𝐽 ) + (−


𝐽 ) + ( 𝐽
) (3)
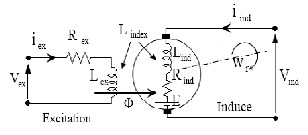
Fig. 4: PID controllers with fractional orders
Into the expressions for N and P. Rather than continuing with algebra here, we will simply represent these equations in Sim- ulink.
Simulink can work directly with nonlinear equations
IJSER © 2012
http://www.ijser.org
The research paper published by IJSER journal is about Design of Optimal Fractional Order PIDController using Genetic Algorithm and PSO Algorithm 3 3
ISSN 2229-5518
3 GA BASED TUNING OF THE 𝑷𝑰 𝝀 𝑫 𝜹 CONTROLLER
GAINS
Introduction to Genetic Algorithm 𝐏𝐈 𝐃
In 1975, GA was proposed firstly by Holland [5]. It is an
optimization algorithm and applied to various fields, including business, science, and engineering. Based on the survival-of the-fittest strategy proposed by Darwin, this algorithm will eliminate unfit components to select the fittest
component by Man-made fitness functions generation by generation.
A. Initialization
In the initialization, the first thing to do is to decide the cod- ing structure. Coding for a solution, termed a chromosome in GA literature, is usually described as string of symbols from
{0, 1}. These components of the chromosome are then labeled
as genes. The number of bits that must be used to describe the
parameters is problem dependent.
B. Selection
GA uses proportional selection; the population of next gen-
eration is determined by n independent random experiments.
Initial Populations
Calculating Fitness
Decisions
Reproduction
Crossover
Mutation
End
C. Crossover
Cross over is an important random operator in GA and the function of this operator is to generate a new ‘child ‘chromo- some from two ‘parents ‘chromosomes by combining the infor- mation extracted from the parents.
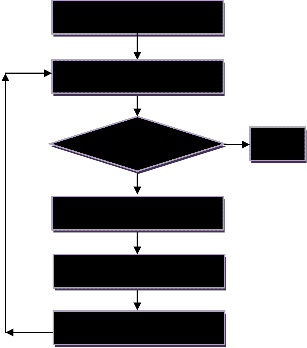
Fig.6: illustrates the block structure of the FOPID controller optimizing process with GA
D. Mutation
Mutation is another important component in GA, though it is usually conceived as a background operator. It operates inde- pendently on each individual by probabilistically perturbing each bit string. A usual way of mutation used in GA is to generate a random number between zero and one and then make a random
change in the v-th element of the string with probability p be-
longing to (0, 1).
FOPI D
PLAN
T
GA
E. Encoding & Decoding
The design variables are mapped onto a fixed-length binary
Digit string, which are constructed over the binary alphabet
{0,1}, and is concatenated head-to-tail to form one long string
referred as a chromosome. That is, every string contains all
design variables. The physical values of the design variables are obtained by decoding the string.
F. Fitness Function
In GA, the value of fitness represents the performance, which is used to rank the string, and the ranking is used to determine how to allocate reproductive opportunities. This means that individuals with higher fitness value will have higher probability of selection as a parent. Fitness thus is some measure of goodness to be optimized. The fitness function is essentially the objective function for the problem.
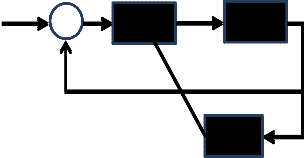
Fig.7: Tuning process of the FOPID controller parameters with GA
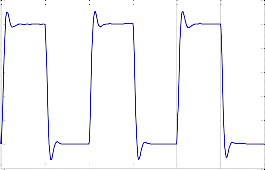
1.2
1
0.8
0.6
0.4
0.2
0
-0.2
0 5 10 15 20 25 30
Fig.8: PID controller with GA
IJSER © 2012
http://www.ijser.org
The research paper published by IJSER journal is about Design of Optimal Fractional Order PIDController using Genetic Algorithm and PSO Algorithm 4 4
ISSN 2229-5518
1.2
1
0.8
0.6
0.4
0.2
0
-0.2
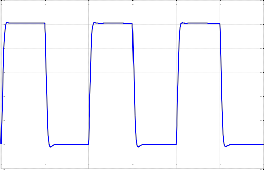
0 5 10 15 20 25 30
Fig.9: FOPID controller with GA
4 CONCLUSION
It has been demonstrated that the parameters optimization of fractional order controller based on modified GA is highly effec- tive. According to optimization target, the proposed method can search the best global solution for FOPID controllers’ parameters and guarantee the objective solution space in defined search space. Based on improved GA, the design and application of FOPID will be appeared in various fields.
REFERENCES
[1] Carpinteri and F. Mainardi, Fractals and Fractional Calculus in Continuum
Mechanics,Springer-Verlag, Wien and New York, pp. 223-276, 1997.
[2] I. Podlubny, “Fractional-order systems and PIλ Dδ controllers,” IEEE
Trans. on Automatic Control, vol. 44, no. 1, pp. 208-213, January1999.
[3] Halila A., Étude des machines à courant continu, MS Thesis, University of
LAVAL, (Text in French), May 2001.
[4] Capolino G. A., Cirrincione G., Cirrincione M., Henao H., Grisel R., Digital signal processing for electrical machines, International Conference on Electri- cal Machines and Power Electronics, Kusadasi (Turkey), pp.211-219, 2001.
[5] . J. Holland, “Adaptation in Natural and Artificial Systems”, University of
Michigan Press, Ann Arbor, Michigan, 1976.
IJSER © 2012
http://www.ijser.org