International Journal of Scientific & Engineering Research, Volume 6, Issue 4, April-2015 305
ISSN 2229-5518
Design and Simulation of Terminal Node
Controller for KufaSat NanoSatellite
Mohammed Chessab Mahdi1, Hiba Imad Sadiq2, Zahraa Razaq Hameed3, Hussain kareem Mute'eb4
Abstract— This paper presents the design and simulation of communication subsystem of KufaSat Nano-Satellite in general and focuses on the terminal node controller as a key part of the communications subsystem. A transceiver, terminal node controller (TNC), and antenna has been selected as communications subsystem hardware. A terminal node controller consists of a micro con- trol unit, a modem, EPROM and software that implement the AX.25 protocol.
Index Terms—Terminal Node Controller, Communication Subsystem, KufaSat, NanoSatellite.
—————————— ——————————
1.INTRODUCTION
C ubesats is a class of satellites known as
Nanosatellites and typically uses commercial
off-the-shelf components for its electronics. Di- mensions are measured in (cubesat units) called a U. A 1U cubesat is a cube with 10 cm long to each face and weighs less than 1.33 kg. The common cubesat sizes are 1U, 2U, and 3U, where 3U is 10x10x30 cm and weighs less than 4.0 kg. The cubesat standard was developed by researchers at California Polytech- nic State University (Cal Poly) and Stanford Univer- sity to help universities worldwide to perform space science and exploration.
Kufasat is the first Iraqi student satellite project at University of Kufa and has mission to imaging pur- poses and designed for a low earth orbit (LEO) of about 600km. In accordance with CubeSat specifica- tions, it is 1U Nanosatellite with a total mass of 1kg, and its size is restricted to a cube measuring
10×10×10 cm3. It also contains 1.5 m long gravity gradient boom, which will be used for passive atti- tude stabilization in addition to three magnetic coils used as active attitude stabilization [1].
————————————————
• Mohammed Chessab Mahdi is full time lecture in Technical Institute of Kufa Al-Furat Al-Awsat Technical University –Iraq Email- mchessab@yahoo.com
• Hiba Imad Sadiq, Zahraa Razaq Hameed, Hussain kareem Mute'eb are currently pursuing BSc degree program in electronic and communications engineering department in University of Kufa, Iraq.
2. REQUIREMENTS AND CONSTRAINTS
The cubesat specification sets strict requirements on the mass and the volume to fit properly within, and launch correctly from inside of the Cubesat deployer. The standard cubesat deployer, used successfully in each cubesat mission to date, is the Cal Poly designed Poly Picosatellite Orbital Deployer (P-POD) [2].
One of the main requirements of any satellite is the ability to communicate with the earth reliably by sending and receiving data from the ground station. This data is sensors data which is details of health of satellite, telemetry data which provide the orbital location of the satellite, and commands from ground station to execute a specific program or function.
Communication with the earth can be established using a wide range of radio frequencies, depending on the data rate requirements, earth station equipment costs, and Federal Communications Commission (FCC) licensing restrictions [3].
Amateur frequency bands would be used for uplink and downlink communication in KufaSat. The exact uplink and downlink frequencies will be finalized after coordination with International Amateur Radio Union (IARU). KufaSat will use UHF range for the downlink (status of satellite and beacon) and VHF range for uplink (telecomand and software updates) in addition to use S-band for downlink payload imag- es. Audio Frequency Shift Keying (AFSK) will be used to send commands to KufaSat in at a data rate of
1200bps. The communication system is also capable
IJSER © 2015 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 6, Issue 4, April-2015 306
ISSN 2229-5518
of transmitting a CW beacon periodically carrying telemetry data in Morse code format.
Cubesats are typically launched in what is called a low-earth orbit (LEO). Low earth orbits are charac- terized by their short range and high orbital velocity
.From satellite’s orbit we can determine the period, through it the satellite is able to communicate with a fixed ground station this period called the communi- cation window and defined as the amount of time that a fixed ground command station can transmit to and receive signals from a satellite. The duration of this window is determined by the orbital parameters. A communication window for KufaSat of approximate- ly 4-8 minutes, with 3 to 5 passes above the ground station per day
A store-and-forward type of communications archi- tecture is key to the success of the communications subsystem due to the short-duration, multiple pass, and low-altitude characteristics of the orbit and the
low-cost requirement of the mission [4].
4.1 Micro control unit
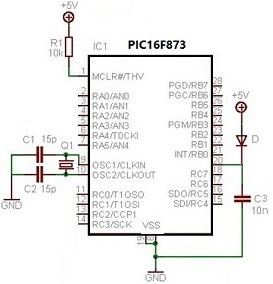
The PIC16F873 was chosen specifically because it support for the Inter-IC Communication (I2C) bus (the protocol used to communicate with the main satellite bus) and its extremely low power consump- tion and power management abilities [5]. The PIC16F873 is programmed with software TNC that is responsible for both encoding and decoding AX.25 data.
3. COMMUNICATION SUBSYSTEM ARCHITECTURE
Communication subsystem of Kufasat consists of transceiver including transmitter and receiver, termi- nal node controller (TNC) including modem, and antenna. Block diagram shown in Fig (1) explain the
4.2 Modem
Fig 2. PIC16F873
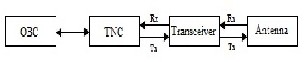
main parts of communication subsystem of Kufasat.
Fig 1. Communication subsystem block diagram
4. TERMINAL NODE CONTROLLER
A terminal node controller (TNC) is a main part of communication subsystem of Nanosatellite. Typical model of a terminal node controller consists of a mi- cro control unit, a modem, EPROM and software that
implement the AX.25 protocol.
The Modem modulates a 1200 baud AFSK (Audio Frequency Shift Keying) signal. The serial bit stream is provided to the microprocessor which processes the packet radio data. A MX-614 FSK MODEM chip shown in Fig (3) is used for main component for modulation. The MX614 is a low voltage, low power CMOS integrated circuit designed for the reception or transmission of asynchronous 1200bps data. It provides an optional Tx and Rx data retiming func- tion which can eliminate, based on user preference, the need for a UART in the associated μC when op- erating at 1200bps[6].
IJSER © 2015 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 6, Issue 4, April-2015 307
ISSN 2229-5518
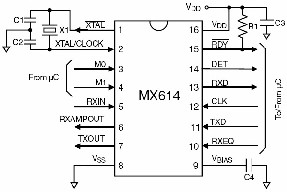
Fig 3. MX614 Modem
4.3 Ax.25
The most commonly used protocol for the data link layer for out of the processor data transmitted is Ax.25 which is designed for use by amateur radio operators. It supports amateur call names, connected links, and half / full duplex. The Ax.25 protocol en- velops data into Ax.25 frames to pass over a serial link to a TNC. There are three general types of AX.25 frames: Information frame (I frame), Supervi- sory frame (S frame), and Unnumbered frame (U frame). Each frame is made up of several smaller groups, called fields. The structure of the three basic types of frames is shown in Fig (4 a), Fig (4, b).
Flag | Address | Control | Info | FCS | Flag |
01111110 | 112/224 Bits | 8/16 Bits | N*8 Bits | 16 Bits | 01111110 |
Fig 4a U and S frame construction.
Flag | Address | Control | PID | Info | FCS | Flag |
01111110 | 112/224 Bits | 8/16 Bits | 8 Bits | N*8 Bits | 16 Bits | 01111110 |
Fig 4b Information frame construction. The microcontroller will collect the data to be trans-
mitted from the sensors and payload, convert these data into a stream of 8-bit binary numbers. These numerical strings packetize into AX.25 format, and send to modem which modulate it using Audio Fre- quency Shift Keying (AFSK), then key the transmit- ter to send the signal to the ground station through the satellite’s antenna. Likewise, when receiving com- mands from the ground station, the TNC will demod- ulate these commands, unpack and decoding it and then redirect commands to OBC.
5. SCHEMATIC AND PCB LAYOUT
The complete schematics of the engineering model of the TNC card are shown in fig 5. All work with the PCB was done on the computer using Proteus Design Suite V8. The prototype was a two-layer PCB within the physical size of 48x48 mm with 1.25 mm board thickness and 50μm feature thickness. Fig 6 explain artwork PCB layout, (A) Top Copper, (B) Bottom Copper, (C) Two Layer. Fig 7 is 3D view, (A) with
components, (B) without components.
IJSER © 2015 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 6, Issue 4, April-2015 308
ISSN 2229-5518
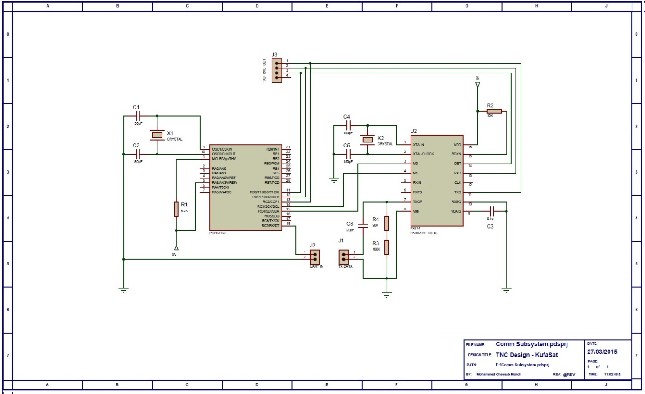
Fig 5. TNC Complete Schematic Diagram
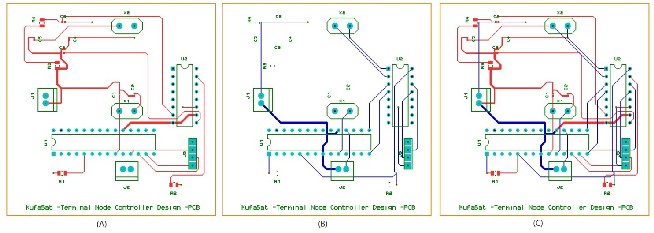
Fig 6. TNC PCB Layout A-Top, B-Bottom, C-Two Layer
IJSER © 2015 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 6, Issue 4, April-2015 309
ISSN 2229-5518
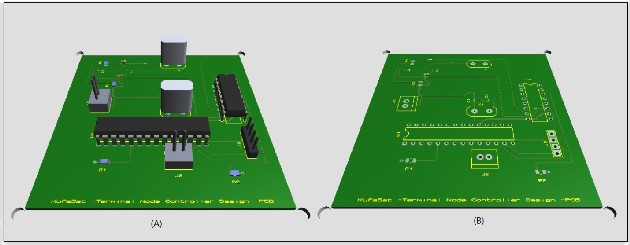
Fig 7. 3D view A- Front view, B- Back view
CONCLUSION
KufaSat mission requirements state that the downlink and uplink communications should be reliable, low power consumption and low cost. The current communications subsystem design meets these requirements through using commercial-off-the-shelf com- ponents, which are low cost and low power consumption. The communications subsystem hardware has been selected to work effectively. Further design and implementation is required to en- sure functionality in space.
REFERENCES
[1] Mahdi Mohammed Chessab, Shehab Abd-AL-Razak, Direct Fuzzy Logic Controller for Nano-Satellite, Journal of Control Engineering and Technology JCET, Vol. 4 Issue. 3, July, 2014.
[2] Jordi Puig-Suari, Clark Turner, William Ahlgren, Development of the Standard
CubeSat Deployer and a CubeSat Class PicoSatellite1, 07803-6599-2, IEEE,
2001 .
[3] Chris Noe, Design and Implementation of the Communications Subsystem for the Cal Poly CP2 Cubesat Project, Computer Engineering Department Cali- fornia Polytechnic State University, San Luis Obispo, June 11, 2004.
[4] W. J. Larson and J. R. Wertz. Space Mission Analysis and Design. 1999.
[5] Microchip Technology Inc, PIC16F873 Family Data Sheet, 28/40-Pin 8-Bit
CMOS FLASH Microcontrollers, 2001. [Online]
http://pdf1.alldatasheet.com/datasheet- pdf/view/74972/MICROCHIP/PIC16F87X.html
[6] CMLMicrocircuits, MX614 Bell 202 Compatible Modem, 2002. [Online]
http://pdf.datasheetcatalog.com/datasheet/MXCOM/mXqwuwu.pdf
IJSER © 2015 http://www.ijser.org