International Journal of Scientific & Engineering Research Volume 4, Issue 1, January-2013 1
ISSN 2229-5518
Design and Implementation of pH Control System for Boiler Feedwater using Industrial Automation Techniques
V.G.Vijaya, A.Kumaraswamy
Abstract— As the plant’s boiler represent a large capital investment as well as a crucial portion of overall plant operations,it is essential to improve the life of the boiler.One of the parameter that affects the life of the boiler is the pH imbalance of boiler feedwater.The main objective of the control effort is to maintain the pH at areference trajectory in the presence of severe load changes in the feed water composition.This can be achieved by adding neutralizer of the required quantity.In this paper two artificial intelligent concepts are used for the pH control purpose.The Neural network model is used as an estimator of pH Value and the second one a fuzzy logic controller, used for dosing the optimum quatity of neutralizer.Both the estimator and the controller are built using MATLAB-SIMULINK and the results are analysed.
Index Terms— Artificial Neural Estimator, Boiler Feedwater, Fuzzy Logic Controller, MATLAB-SIMULINK, Neutralizer, pH control
—————————— ——————————
The treatment of boiler feed water is essential as it im- proves the life of the boiler and also reduces the operat- ing cost. Corrosion and scale formation are the im- portant factors that cause the degradation in the boiler performance. Alkalinity of the feed water is one of the important parameters to control corrosion of boilers be- cause in alkaline solution the reaction rates of the anodic and cathodic are slow. Volatile amines and oxygen scav- enging compounds can be used to control the pH value thereby maintaining the corrosion control [7, 9].pH con- trol can be easily achieved by adding appropriate amount of neutralizer to the feed water by means of any external devices. Nowadays online pH control is prevail- ing which incorporates the DCS for continuous monitor- ing of the pH dropping and the balancing of the same. The required pH level can be maintained by adding the necessary neutralizer quantity by means of the fuzzy controller, as fuzzyfied devices can be easily integrated with DCS.But this requires the combinations of artificial intelligent systems with that of the existing instruments.
An intelligence system is a system that is able to make decisions like humans in critical situations as are in- stalled and monitored with human but not assisted by them. Intelligence systems adapt themselves using some example situations (inputs of a system) and they correct decisions automatically for future situations. for future situations. Neural networks (NNs), Fuzzy systems, and Neuro-Fuzzy systems are the examples of the artificial intelligence systems. As fuzzy deals with approxima- tions neural network can be used instead. Previous stud-
————————————————
ies inferred that, neural network can be used to model any drinking water utilities.[11,12].
Neural networks can also be used as a controller by all means in all type of industries. Online coagulant dos- ing is possible by constructing neural sensor by consid- ering the raw water parameters [1].By considering the application of neural network as a feed forward control- ler and the inverse model pH control can be easily achieved. The controller is simulated in a controlled en- vironment and its performance was studied [iii]. The modeling of the pH system is being done and the analy- sis on the pH neutralization using the various controller are performed and the comparison of conventional con- trollers with that of the fuzzy controllers for a case study problem is carried out to show the advantages of artifi- cial intelligent systems over conventional ones.
From the previous studies it’s clear that pH control has been done for the drinking water utilities or of the waste water streams. This paper presents the pH control of feed water of boiler. As its essential to maintain a spe- cific pH range of the feed water it’s necessary to use an effective controller for controlling purpose. So an effi- cient neural controller has been built for the optimal dos- ing of neutralizer.
The plant considered in this study is the Bannari Am- man Sugars Limited, located in Sathyamangalam.It has a cogeneration plant producing power output of
20MWatts.The Cogeneration plant constitutes boiler unit producing steam capacity of 6-8 tonnes.Among this a 2-
3 ata steam is utilized for crystallizing the sugar juice and the other half is used for generating power.
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 4, Issue 1, January-2013 2
ISSN 2229-5518
A third portion of the steam is utilized in the deaera- tor.The condensed steam from all the three sections have been used as the feed water for the boiler. Since there occurs some lose in the condensed steam the make up water prepared and stored already has also been used along with this condensed stream as the boiler feed wa- ter.Corrosion is one of the important factors that reduce the performance and the life of the boiler. To reduce cor- rosion in the walls the magnetite layer formed inside the walls has to be maintained. This magnetite layer formed makes the non contact of water with the walls so that further corrosion can be controlled.
The maintenance of the layer can be achieved by maintaining a constant range of pH as of required. But due to the increase in alkalinity the layer starts degrad- ing. So to maintain a constant range of pH a neutralizer of required quantity has to be dosed. The neutralizer used is hydrazine which is a chemical deoxygenerator that reacts quickly with dissolved oxygen to produce water and nitrogen. The reaction is as follows
N2H4 (Hydrazine) +O2 = 2H2O + N2
Hydrazine is thus capable of removing dissolved ox- ygen from the boiler feed without increasing the total dissolved solids concentration and therefore its pre- ferred in high pressure boilers. Direct decomposition of hydrazine also takes place under boiler working condi- tions as given by the following reaction
3 N2H4 = 4NH3 + N2
The ammonia carried with the steam is dissolved in the condensate coming out of condenser and helps to maintain pH value of feed water at satisfactory level [i].In the plant the monitoring of the pH value is done by means of the DCS employed and the controlled dosing is performed by the fuzzy controller by the adjustment of the stroke of the pump. The pH level to be maintained is around 8.8-9.2.If the inlet pH is below the lower limit or above the upper limit the strokes of the pumps are ad- justed in such a way that an optimum quantity of the neutralizer gets dosed. This can be done by an experi- enced operator as it requires the thorough knowledge about the process.
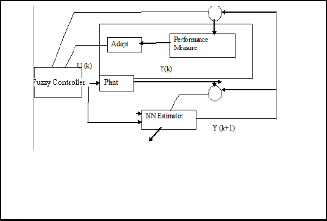
The control system is the closed loop. The measured variable is the input pH of the boiler feed water and the manipulated variable is the flow rate of the dozer quan- tity. The controller is an inverse model controller based on the combination of a direct ANN and a fuzzy Logic Controller. The direct ANN is the plant estimator that predicts the output pH and the fuzzy controller provides the control action. The diagram of the controller is as follows
Fig. 1. Structure of Controller
In process control most of the closed loop control ap- plications are been developed using artificial neural network. The learning capability of the network makes the controller to perform the control actions perfectly even though there exist nonlinearities in the system.The step outlined by the researchers for the pH control ap- plications provides a good guideline to construct the neural controller. The existing papers on pH control ap- plications helps to determine the model inputs and suit- able architecture, weight optimization (training) and validation of the network. The MATLAB software is used to develop the model.
The 100 available test samples are classified into three data sets for modeling the network. The subsets are :(i) a training set, (ii)a testing set,(iii)a validation set. Based on the probability values the data sets are classi- fied. Divisions of the data set are necessary because cali- brating the data can avoid over fitting of data. The in- puts were scaled to a range of 0-1 to avoid the mislead- ing solutions when sigmoid function is used as transfer function in the Ann output calculation.
The inputs to the neural estimator were the initial pH values, temperature and the dozer quantity. The model outputs were the final pH that has to be controlled. For the prediction of optimal dozer quantity an inverse ANN model is constructed with the help of the output from the previous network and the reference pH to be achieved. This part acts as the neural controller as it con- trols the pH by adding optimum dozer quantity.
The ANN constructed for its purpose ids the multi- layer perceptron (MLP).MLPs have been already used
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 4, Issue 1, January-2013 3
ISSN 2229-5518
successfully for the prediction of optimal coagulant dos- age [7,8,9] and other water resources and environmental variables .The optimum number of hidden layers can be fixed by trial and error method. Normally not more than
2 hidden layers are used for process control applications. As the layer number goes the complexity and the error convergence gets complex. The optimum number of nodes in the hidden layer is given by 2I+1, where I is the number of model inputs and this number has been used as an upper limit for any continuous function modeling. [8].
The models were trained using back propagation (BP) algorithm, as it has already used or most of the control applications. The optimal values for the controlling pa- rameters of the BP algorithm were found by trial and error. The training function used is Levenberg mar- quardt algorithm, which may reduce the error to the minimum thus by making the network to learn thor- oughly.The end of the training is identified by the repeti- tion of the error data or the least error value.
The models were validated using the 25 samples in order to test the generalization ability of the models over the range of data used for training. It should be noted that the range of data used for validation were not been used in training because they are used for error conver- gence and to make the network to learn and also to de- cide when to stop training. The different models are trained and the mean square error (MAE) obtained as the output is plotted against the actual pH value. A re- gression analysis was performed to show the correlation between the actual pH value and the trained neural val- ue also, between the actual dozer quantity and the de- sired one found by titration. The MAE provides an abso- lute measure of the forecasting ability of the various models and can be used to determine whether model predictions are suitable for process control [6,8].
To develop the mathematical model of the controller, it is assumed to be a first order system.The mathematical modeling is done through by understanding the process and is given below,
X(t)+T dX(t) = GU(t) where dt
U (t) = input or the current pH value. X (t) = System response
T= Time constant
The membership function is defined and the values for
the function is been provided. The controller is designed
using MATLAB-SIMULINK and results are analyzed.
The Fuzzy controller has been built and the response obtained from the network is compared with the actual pH values. The error between the graph is plotted be- tween Error and actual pH (Fig 2). Also the output ob- tained for the optimal quantity of dozer from the fuzzy controller is also compared with the actual dosed quanti- ty and the error is plotted as a graph (Fig 3).
Fig 2.Error Vs Actual pH
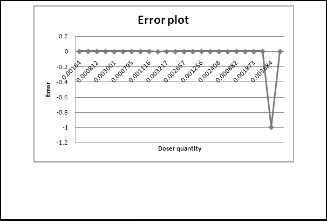
The response obtained from the graph shows that the controller constructed are valid ones and can produce appropriate responses for the future come unpredicted values.
Fig. 3 Error Vs Doser quantity
A correlation analysis was performed for actual pH val- ues obtained by titration and the trained values obtained from the network showing a correlation coefficient of
0.946748.
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 4, Issue 1, January-2013 4
ISSN 2229-5518
The ANN approach was found to be an effective one for the pH control of boiler feed water was presented in this paper. The results showed that control of pH by means of incorporating artificial intelligent system is a power- ful technique to overcome the problems created by the hard wired devices. Also ANFIS (Artificial Neural Fuzzy Inference System) can be used for better control of pH as fuzzy’s approximation is refined by neural networks. The training of neural network requires the detailed analysis on the data samples representing all possible situations prevailing in the plant. The advantage of us- ing Artificial Neural Network for the control problems can be clearly found from the project.
The authors wish to thank the Deans & the management authorities who motivated them to carry their work .
[1] Akesson M.B et al., “Neural network approximation of a nonlinear model predictive controller applied to a pH neutralization process”, Computers and Chemical Engineering, 2005, Vol 29, 323–335.
[2]. Audun Faanes and Sigurd Skogestad, “pH-neutralization: inte- grated process and control design”, Computers and Chemical Engi- neering, 2004, Vol 281475–1487.
[3]. Fuente M. J. et al., “Neuro-fuzzy control of a pH plant”, 2005,
IFAC.
[4]. Gustafsson K.T et al., “Modeling of pH for Control”, Ind. Eng.
Chem. Res. 1995, Vol 34, 820-827.
[5]. Jietae Lee and Ho-Cheol Park, “Nonlinear pH Control Using a
Three Parameter Model”, ICASE: The Institute of Control, Automation and Systems Engineers, KOREA, 2000, Vol. 2.
[6].Karnachi N.Nand Geoff Waterworth, “Non-linear model reference
control of pH process: an Experimental study”, Proceedings 15th Eu- ropean Simulation Symposium, 2003.
[7].Lamanna R., Uria M., Kelly J.A., and. Pinto E, “Neural Network Based Control of pH in a Laboratory-Scale”, IEEE Transactions, 1996. [8].Maier R.H, Nicolas Morgan, Christopher W.K. Chow, “Use of artifi- cial neural networks for predicting optimal alum doses and treated water quality parameters”, Environmental Modeling & Software, 2004, Vol 19,485–494.
[9].Palancar C.M., Aragon M.J, and Torrecilla S.J, ”pH-Control System
Based on Artificial Neural Networks”, Ind. Eng. Chem. ,1998,Vol 37,
2729-2740.
[10].Raymond Wright and Costas Kravaris, “Online identification and
non linear control of an industrial pH process”, Journal of process control, 2001, 361-374.
[10].Regunath S. and Kadirkamanathan V., “Design of a pH control system using fuzzy non-uniform grid scheduling and evolutionary programming”, Applied Soft Computing 1 ,2001, 91–104.
[11].Syafiie S. et al., “Model-free intelligent control of neutralization
processes: experiments on a laboratory plant”, 2004, IFAC.
[12].Syafiie S. et al., “Model-free intelligent control with gain adapta- tion applied to pH control”, 2004, IFAC.
[13].Waller B.J and Toivonen T.H, “A neuro-fuzzy model predictive controller applied to a pH-neutralization process”, 2002, IFAC.
Books
[14].Arora S.C and Domkundwar, A Course in Power Plant Engineer- ing, Dhanpat Rai & Sons, 1993.
[15].Bart Kosko, Neural Networks and fuzzy systems –A dynamical
approach to machine intelligence, Prentice Hall, New Delhi, 1992. [16].Sivanandan S.N, Sumathi S and Deepa S.N, Introduction to Neural Networks using MATLAB 6.0, Tata Mc Graw Hill, NewDelhi, 2006.
IJSER © 2013 http://www.ijser.org