International Journal of Scientific & Engineering Research Volume 2, Issue 10, Oct-2011 1
ISSN 2229-5518
Control and System Identification via Swarm and
Evolutionary Algorithms
Tayebeh Mostajabi, Javad Poshtan
Abstract— A central topic of swarm intelligence is the investigation of different types of emergent collective behaviors in swarms. This article focus on the swarm intelligence applications in control and system identification. Particle swarm optimization (PSO), a novel population based stochastic optimizer with fast convergence speed and simple implementation and genetic algorithm, have been successfully applied to solve system identification optimization problems. In addition, PSO and ant colony optimization (ACO) have been applied as a navigation algorithm in swarm robots. Some of the recently proposed swarm based metaheuristics such as bacterial foraging optimization algorithm (BFOA), wasp optimization algorithm (W OA), bee optimization algorithm (BOA) and Physarum Solver will need further investigation to assess their potential for generating state-of-the-art algorithms that are useful for this area.
Index Terms— adaptive control; evolutionary algorithm; global minimum, local minima, robotics; swarm intelligence; system identification.
—————————— ——————————
1 INTRODUCTION
WARM and evolutionary algorithms are useful tools that have been inspired by the natural behavior between organ- isms and their real world interactions or even the laws of physics and the relationship between particles and objects. Maybe the birth of such algorithms began with genetic algo- rithm. GA was presented by John Holland in the 60's AD with the taking idea of behavior of chromosomes in cell division in living organisms. This is an optimization algorithm that in addition to solving optimization problems, is applied in vari- ous applications from music to complex engineering problems [1]. About 1990, another famous algorithm named ant colony optimization (ACO) is introduced by Dorigo Moroco [2] which is inspired from ant behavior where finding the shortest path from the nest to the food source. In 1995 particle swarm opti- mization (PSO) was born according to behavior of flocks of migratory birds [3]. Since then, many researchers have studied on such algorithms. Some of them found and introduced another novel algorithms. These new algorithms can be di- vided into three categories: The first was created considering the behavior of other living organisms, for instance, bacterial foraging optimization algorithm (BFOA) mimics how bacteria forage over a landscape of nutrients optimally[4], or bee colo- ny algorithm is inspired honey bees when they return to the hive and tell the others about finding a good foraging site via the famous dance language, or principles from self-organized task allocation and social hierarchy within a colony of wasps is modeled as wasp algorithm for scheduling. or also physarum solver, physarum is a slime mode that is built by a kind of di- atom named plasmodium in order to reach to the food opti-
mally [5]. The second category like SOA (seeker optimization
————————————————
Tayebeh Mostajabi is currently pursuing masters degree program in elec- trical engineering in Iran University of Science and Technology , Tehran, Iran. E-mail: mostajabi@elec.iust.ac.ir
Javad Poshtan is a faculty member of electrical department in Iran Univer-
sity of Science and Technology , Tehran, Iran. E-mail: jposhtan@iust.ac.ir
algorithm) is simulated some social human behavior [6]. or Imperialist Competitive Algorithm that is based on dominance of stronger countries on weaker states [7] and the third one has been developed according to fundamental physics laws [8-
10].
In fact, all of these algorithms are optimization techniques,
some of them like ACO more successful in local and some
other like PSO in global optimization problems. Their high
ability in solving complex optimization problems Led another
group of researchers seeking to apply them directly or as a
combination with each other or other computational intelli-
gence algorithms [11] or even conventional methods [12-14,23]
to find simpler solutions for solving specialized challenging
issues in their own fields. In this regard, it can be pointed to
the increasingly influence of swarm and evolutionary compu- tation in control engineering applications.
Nowadays, control engineering has been found many applica- tions in various sections of human life. In control system engi- neering, the desired output is applied as input to system and the tendency is reaching the desired output and tracking input by output.
A system under the control can be a plain that should track the special path or a robot with special task or even a biological system such as brain, heart or any kind of disabled human body that we want to improve its faults with a suitable con- troller and even so the system under control can be some sec- tions of social human life such as traffic jam, the fluctuate of burse and other social living difficulties.
Swarm and evolutionary algorithms have been find applica- tions in many applied control engineering. for instance, in var- ious controller designs, path tracking, robotic and swarm ro- bots and also in system identification.
This article attempts to review some parts of influence of these algorithms in control engineering, controller designing, robotics and specially their applications in adaptive control and system identification.
2 SYSTEM IDENTIFICATION
In order to reach an acceptable control for system or plant, The primary step is, finding a suitable mathematical model. find-
IJSER © 2011 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 6, June-2011 2
ISSN 2229-5518
ing a suitable model is the basic work and also the most diffi- cult one in control engineering. If we can obtain a proper model for under the control system, controller designing and good tracking is probable. Vice versa, If we do not have a proper model, we would hardly succeed to design a fine con- troller and tracking.
In cases where the control system, is a small device and rela- tively detailed map of all its components are available, an appropriate model can be obtained by using the laws and theories of electricity, magnetism, mechanics, and thermody- namics. But in many cases, such a detailed map is not availa- ble. but fortunately there is another approach that is system identification.
In system Identification configuration, in order to find an ap-
propriate model, we need a set of informative data. This data
set is produced by applying a proper input to the system and
calculate the equivalent output. After that we should do curve
fitting and find the best descriptor model for available data
set.
Depending on what method to use and what kind of model
we selected for identification, several well-known classical
methods for estimating unknown parameters of the model
have been introduced [15-16]. These methods are very success-
ful in some situations but they do not succeed in many cases
efficiently. Hence, in recent decades, researchers tend to util- ize new methods including swarm intelligence and preparing them for system identification.
In many cases, the state-space model is used for modeling sys- tems and processes. In these cases swarm intelligence algo- rithms can estimate the unknown parameters. For instance, in [17], ACO is used for parameters identification of induction motor. ACO is based on finding the shortest path. Ants depo- sit pheromone in their journey from nest to the feed. The other ants in the colony sense pheromone and prefer to select a path that its pheromone concentration is higher. Ants that have accidentally chosen the shorter path, would return sooner. Inchmeal, pheromone concentration of the shortest path is more and more naturally due to faster traffic so that after a while, colony are concentrated on the shortest path. In ant co- lony optimization algorithm, a number of artificial ants build solutions to an optimization problem and exchange informa- tion on their quality via a communication scheme that is remi- niscent of the one adopted by real ants [2]. Therefore the prob- lem should convert to an especial graph in which artificial ants try to find the shortest path. In [17] state space model is em- ployed to estimate parameters of induction motor where all of the estimated parameters are divided in to 5 groups and their boundary conditions are adjusted according to our knowledge about induction motor. after that an especial graph path is defined for artificial ants and the quality of selected path by each ant is calculated according to selected nods in its journey in the graph.
Chaotic ant swarm in [18-19] is used for parameter identifica- tion in chaotic systems. In [20] Chaotic Particle Swarm Opti- mization that is more capable of PSO to find global minimum and escape from local minima, is employed for nonlinear iden- tification according to control a nonlinear yo-yo motion sys- tem.
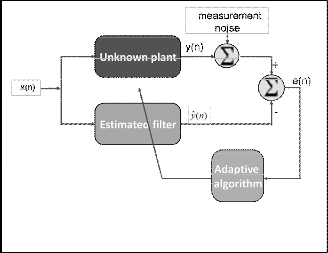
Adaptive filters are used to model many processes in system identification. It is generally shown in figure(1), The adaptive filter attempts to iteratively determine an optimal model for the unknown plant, based on some function of the error be- tween the output of the adaptive filter and the output of the plant. The optimal model or solution is attained when this function of the error is minimized. The adequacy of the result- ing model depends on the structure of the adaptive filter, the algorithm used to update the adaptive filter parameters, and the characteristics of the input signal [14]. But in many cases especially where infinite impulse response (IIR) or nonlinear adaptive filter such as a neural network or polynomial filter is applied, the fallowing error function is multimodal. Hence many classical methods such as Least Mean Square (LMS) or back-propagation are trapped to local minima and could not find the optimal model. On the other hand swarm intelligence (SI) optimization methods are very powerful optimization techniques for many multimodal landscapes.
As a result of this, several researchers have proposed various methods in order to use SI and evolutionary algorithms in adaptive filtering applications, for instance, in [13-14,21-28] genetic algorithm is utilized to estimate the parameters of an adaptive filter model in order to use in system identification where fitness function based on mean squared error (MSE) between the unknown plant and the estimated model is used. GA behave as an adaptive algorithm in the circled process. At first the algorithm begin with the random set of possible solu- tions that each one is embedded in one chromosome. Each chromosome has the number of genes that is equal with the number of unknown parameters of the adaptive filter. At every generation, the fitness of each individual (chromosome) is evaluated by a predetermined fitness function. An individ- ual with lower fitness value is considered. The population is then evolved based on the circled process of natural selection, survival of the fittest, and mutation. This cycle is continued in order to find the optimal solution.
Fig. 1. Adaptive system identification configuration using output error.
IJSER © 2011 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 6, June-2011 3
ISSN 2229-5518
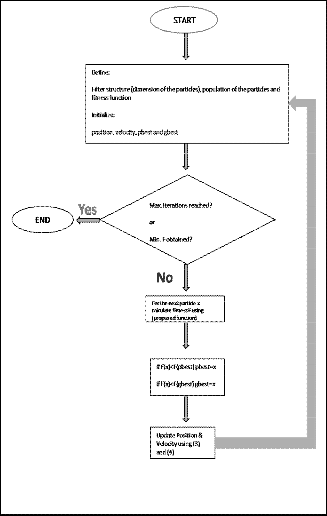
Another popular technique in this category is Particle Swarm Optimization. PSO is the global optimization algorithm with fast convergence that is applied as an adaptive algorithm in system identification [13,14,30-34]. In PSO the population search the optimal solution in D dimensional space based on fitness function. D is the number of unknown parameters of the adaptive filter model. Each particle has its own position ( ) and velocity (
) and velocity ( ) vectors by D dimension (see equations (1) and(2)) that are updated in each iteration respect to equations (3) and (4). The cycle of the algorithm is iteratively continued in order to find the optimal solution. Figure(2) illustrates the PSO circle for adaptive filtering in system identification.
) vectors by D dimension (see equations (1) and(2)) that are updated in each iteration respect to equations (3) and (4). The cycle of the algorithm is iteratively continued in order to find the optimal solution. Figure(2) illustrates the PSO circle for adaptive filtering in system identification.
x i x i1 , x i2 ,..., x iD
vi vi1 , vi2 , ..., viD
(1)
(2)
x iD k 1
viD k 1
x iD k viD k 1
* viD k c1 * rand1 () * PiD xiD
(3)
(4)
c2 * rand2 () * PgD x iD
In above equations, c1 and c2 are accelerator constants that are adjusted by user. w is the weight that controls the previous velocity vector. Pi=(Pi1,Pi2,...,PiD) is the personal best position (pbest) found by particle i, and Pg=(Pg1,Pg2,...,PgD) is the global best position (gbest) found in a whole swarm [5,13].
Since generally finding the optimal answer in produced mul- timodal error surface is challenging, researchers have tried to enhance PSO convergence for this issue. For instance, in [13], two main weaknesses of PSO, outlying particles and stagna- tion is modified and the modified algorithm is used for adap- tive filter modeling. Other examples in this area are [35-37].
The other algorithm that is employed for adaptive filtering in system identification is ACO [38]. In [39] cat swarm optimiza- tion is used for infinite impulse response (IIR) modeling. Oth- er examples are artificial bee colony algorithm [40,41] and BFOA [4,42] that are utilized as an adaptive algorithm for es- timated parameters of a model based on adaptive filter.
Chaotic ant swarm that is a kind of modified ant algorithms is synthesized with type III fuzzy method in [43] and the combi- nation is used as an adaptive algorithm. [44] first introduced a novel fitness function and then embedded it in PSO for robust system identification. Differential evolution that is an evolu- tionary algorithm like GA, is utilized in [45] as an adaptive algorithm.
Estimating unknown parameters of a model for multivariable systems is a challenging problem because of couplings and interactions between channels. In this situations, adaptive al- gorithm should be capable in local searching besides global one. In [46] a modified genetic algorithm, named memetic al- gorithm that has global and local searching capability, is ap- plied as an adaptive algorithm for multivariable system identi- fication.
Fig. 2. Flowchart of PSO used for adaptive filtering in system identification.
3 SWARM INTELLIGENCE FOR CONTROLLER
DESIGNING AND ADAPTIVE CONTROL
Swarm and evolutionary algorithms are applied in adaptive control for estimating unknown parameters of model or con- troller. model estimation with these algorithm where dis- cussed in previous section has many applications in adaptive control based on identification, But these algorithms can also be applied for tuning parameters of controller. For instance, a PID controller can be shown kP+ kI/s +kDs in general that kI, kI and kD are adjusted according to conditions and desired target of the problem. In addition, the dynamic of the plant and the quality of feedback loop bound defined region of these parameters, so that if parameters has a value out of the region, system probably tend to instability.
In PID controller design, for self-tuning or fixed mode, swarm and evolutionary algorithms are useful tools. In fixed mode, the algorithm tries to find the best values for PID coeffi- cients according to bounded region based on error signal. In self tuning or auto tuning mode, after adjusting the coeffi- cients, system output is checked by the algorithm consistently or occasionally. Whenever system output is undesirable, that
IJSER © 2011 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 6, June-2011 4
ISSN 2229-5518
is probably happened because of changing circumstances or the dynamic plant, The PID coefficients are adjusted by the algorithm for this new situation again. For applying such al- gorithms in on-line applications, they should able to find the optimal solution with acceptable speed convergence. [47] is an example for this issue in which PSO is used to adjust self- tuning and fixed PID controller for a static synchronous com- pensator (STATCOM).
design of fuzzy controllers is a rather new method, in which controller built of fuzzy system. In fact, the control signal is determined by fuzzy rule base. The quality of fuzzy controller depends on how to define the corresponding fuzzy rule base. As a result of this, swarm intelligence can be applied to optim- ize the fuzzy rule base that is increase the quality of fuzzy con- troller [48-52].
4 ROBOTICS AND SWARM ROBOTS
Swarm intelligence has been demonstrated to be a useful tool in target search applications such as collective robotic search (CRS) [11]. [53] is probably the first project in this issue that began in 1992 and its results are published in 1995. Where each robot in swarm robots weighs amount 10kg and has abili- ty to lift and carry 150kg load. The associated navigation algo- rithm is inspired from real ants where they help each other to carry heavy pieces. At first, when the command signal is sent. The first robot that receives this signal will be a leader of swarm. If the leader becomes out of order, the other is re- placed rapidly. Each robot has its own decentralized control. Nevertheless, all swarm robots are control globally by central computer system. Robots communicate with each other by ad- hoc system. In addition, the position of each one is informed to central computer system by GPS. Flexible PVC material is used to build their bodies. So that they crawl under heavy mass, then a bladder object, embedded in their body is inflated by compressor and the heavy mass is lifted.
Several robotics applications such as rescue and planetary or underwater exploration are performed in very unstructured and partially unknown environments. Robots operating in such environments should display a high degree of mobility, versatility, and robustness to very different and time-varying operating conditions[54]. As a result of this, the other project began in 2002 and still continues. (see www.aco- metaheuristics.org for more information). These swarm robots have decentralized robust control by their own PIC micropro- cessors. Their navigation algorithms are inspired from actual ants when make living bridges to cross large gaps or help each other to cross Steep slopes. These robots have a strong gripper to lift each other, If necessary. Most parts are flexible. They are light and have 660g weigh, Therefore can lift each other easily. They communicate with each other by a local network and also communicate with external computer. Whole swarm are controlled by platform control globally. Each robot can cross
45mm gape, 23mm step and 60 degree slope. However these ability is increase when they are twice. and grows increasing- ly when they are swarm.
In [55] PSO is used as a navigation algorithm for a group of mobile robots in which they can locate a specified target in a
high risk environment with extreme efficiency.
In [56] a group of mobile robots is simulated where their
movement are as the same as particles in PSO algorithm and
in fact real flock of birds in sky. These swarm robots try to
find odor source according to obstacles environment. In order
to escape local minima, each robot have amount of electric
charge. As a result, They repel each other in very closed dis-
tances. Therefore If one of them trapped to local minimum.
The other do not converge it. and have chance to find the odor
source.
4 CONCLUSION
This paper tried to review briefly some parts of influence of swarm and evolutionary algorithms in control engineering, con- troller designing, robotics and specially their applications in adaptive control and system identification. PSO with faster con- vergence speed and simpler implementation than genetic algo- rithm, has been successfully applied to solve system identifica- tion optimization problems and can be employed for on-line ap- plications in self tuning controller design in adaptive control. In addition, swarm robots that have been inspired by the natural behavior between swarm in real word, can be useful for several applications such as rescue and planetary or underwater explora- tion. PSO and ACO have been applied as a navigation algorithm in robotics.
Nevertheless, swarm intelligence and evolutionary computation
will need further investigation to assess their potential for gene- rating state-of-the-art algorithms that are useful for this area.
REFERENCES
[1] R. L. Haupt, S. E. Haupt., Practical Genetic Algorithms. 2th ed. Wiley, New
Jersey and Canada. 2004.
[2] M.Dorigo, M.Birattari, T.St¨utzle ., “Ant Colony Optimization ,”. IEEE Com- putational Intelligence Magazine, pp.28-39,Nov 2006.
[3] J. Kennedy and R. C. Eberhart, “Particle swarm optimization,” Proceedings of
IEEE International Conference on Neural Networks, Piscataway,NJ. pp. 1942–
1948, 1995.
[4] K.M. Passino, “Biomimicry of bacterial foraging for distributed optimization and control,”IEEE Control Systems Mag., vol. 22, no. 3, pp.52–67, June 2002.
[5] D.Merkle and M.Middendorf., “Swarm Intelligence and Signal Processing,” IEEE Signal Processing Magazine, November 2008.
[6] Ch.Dai, W.Chen and Y.Zhu., “Seeker Optimization Algorithm for Digital IIR Filter Design,” IEEE Trans Industrial Electronics, VOL. 57, NO. 5, 2009.
[7] E. Atashpaz‐Gargari, C. Lucas, "Imperialist Competitive Algorithm: An Algo-
ritm for Optimization Inspired by Imperialistic Competition", IEEE congress
on Evolutionary Computation, pp 4661‐ 4667,2007
[8] Ş.İ.Birbil and Sh.Ch.Fang., " An Electromagnetism-like Mechanism for Global
Optimization," Journal of Global Optimization, Vol 25, NO 3,pp 263-282, 2003. [9] LXie, J.Zeng and Zh.Cui., " The Vector Model of Artificial Physics Optimiza- tion Algorithm for Global Optimization Problems," Intelligent Data Engineer-
ing and Automated Learning - IDEAL 2009. Lecture Notes in Computer
Science, Vol 5788/,pp 610-617.
[10] A. Kaveh and S. Talatahari., " A novel heuristic optimization method: charged system search," Acta Mechanica, Vol 213, NO 3-4, pp267-289, 2009 springer.
[11] Ganesh K. Kumar Venayagamoorthy., “A Successful Interdisciplinary Course
On Coputational Intelligence,”. IEEE Computational Intelligence Magazine,
IJSER © 2011 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 6, June-2011 5
ISSN 2229-5518
pp.14-23,Feb 2009.
[12] D. J. Krusienski and W. K. Jenkins, “A particle swarm optimization- LMS hybrid algorithm for adaptive filtering,” Proc. of the 38th Asilomar Conf. on Signals, Systems, and Computers, Nov. 2004.
[13] D. J. Krusienski and W. K. Jenkins, “Design and performance of adaptive systems based on structured stochastic optimization strategies” IEEE Cir- cuits And Systems Magazine, First Quarter 2005.
[14] D. J. Krusienski, “Enhanced structured stochastic global optimization algo-
rithms for IIR and nonlinear adaptive filtering,” Ph.D. Thesis,Dept. of Electric- al Eng., The Pennsylvania State University, University Park, PA, 2004.
[15] L.Ljung , System Identification: Theory for The User. Prentice Hall, 1987. [16] S. Haykin , Adaptive filter theory. 4th ed. Prentice Hall, 2001.
[17] Zh.Chen, Y.Zhong, J.Li , “Parameter Identification of Induction Motors Using
Ant Colony Optimization,” (2008) IEEE Congress on Evolutionary Computation.
[18] L.Li, Y.Yang, H.Peng, X.Wang., " Parameters identification of chaotic systems via chaotic ant swarm," Chaos, Solitons and Fractals 28 (2006) 1204–1211.
[19] Y.Tang, M.Cui, L.Li, H.Peng, X.Guan., " Parameter identification of time-delay chaotic system using chaotic ant swarm," Chaos, Solitons and Fractals 41 (2009) 2097–2102.
[20] L.d.S.Coelho and B.M.Herrera., " Fuzzy Identification Based on a Chaotic Particle Swarm Optimization Approach Applied to a Nonlinear Yo-yo Mo- tion System," Ieee Transactions On Industrial Electronics, Vol. 54, No. 6, De- cember 2007.
[21] K. Kristinsson and G. Dumont, “ System identification and control using genetic algorithms, ” IEEE Trans. Syst, Man, Cybernet, vol. 22, no. 5, pp.
1033-1046, 1992.
[22] S. C. Ng, S.H. Leung, C. Y. Chung, A. Luk, and W. H. Lau, “The genetic search approach : A new learning algorithm for adaptive IIR filtering, ” IEEE Signal Processing Magazine, pp .38–46, Nov.1996.
[23] L.Yao and W.A. Sethares, “ Nonlinear Parameter Estimation via the
Genetic Algorithm,” IEEE Trans. Signal Processing, vol. 42, april 1994.
[24] ].W. Lennon and K. Passino, “Genetic adaptive identification and control,” Eng. Applicat. Artif. Intell., vol. 12, pp. 185-200, Apr. 1999.
[25] O.Montiel, O.Castillo, R.Sep_ulveda, P.Melin., " Application of a breeder genetic algorithm for finite impulse filter optimization," Information Sciences
161 (2004) 139–158.
[26] W.D.Chang, " Coefficient Estimation of IIR Filter by a Multiple Crossover
Genetic Algorithm," Computers and Mathematics with Applications 51 (2006)
1437-1444.
[27] Ch.W.Tsai, Ch.H.Huang, Ch.L.Lin., " Structure-specified IIR filter and control design using real structured genetic algorithm," Applied Soft Computing 9 (2009) 1285–1295.
[28] F.Tong, X.M.Xu, B.L.Luk, K.P.Liu, “Equalization of ultrasonic transducers based on evolutionary algorithm and IIR lattice filter,” Eng. Applicat. Artif. In- tell., vol. 21, (2008) 1409– 1415.
[29] K.Theofilatos, G.Beligiannis, S.Likothanassis., "Combining evolutionary and stochastic gradient techniques for system identification," Journal of Computa- tional and Applied Mathematics 227 (2009) 147_160.
[30] D. J. Krusienski and W. K. Jenkins, “Adaptive filtering via particle swarm optimization,” Proc. of the 37th Asilomar Conf. on Signals, Systems, and Computers, pp. 571–575, Nov. 2003
[31] D. J. Krusienski and W. K. Jenkins, “Particle swarm optimization for adaptive IIR filter structures,” Proc. of the 2004 Congress on Evolutionary Computa- tion, pp. 965–970, June 2004
[32] D. J. Krusienski and W. K. Jenkins, “The application of particle swarm optimi- zation to adaptive IIR phase equalization,” Proceedings of the International Conference on Acoustics, Speech, and Signal Processing, Montreal, Canada,
pp. II-693–II-696, 17–21 May 2004.
[33] D. J. Krusienski., W. K. Jenkins., “Particle Swarm Optimization for Adaptive
IIR Filter Structures,” 2004 IEEE
[34] Siddharth Pal, D. J. Krusienski, and W. K. Jenkins., “ Structured Stochastic
Optimization Strategies for Problems with Ill-conditioned Error Surfaces,”
2005 IEEE.
[35] W.Fang, J.Sun, and W.Xu.,"A New Mutated Quantum-Behaved Particle Swarm Optimizer for Digital IIR Filter Design," EURASIP Journal on Ad- vances in Signal Processing Volume 2009, Article ID 367465, 7 pages.
[36] B.Majhi and G.Panda., " Identification of IIR systems using comprehensive learning particle swarm optimisation," Int. J. Power and Energy Conversion, Vol.
1, No. 1, 2009.
[37] B.Luitel, G.K.Venayagamoorthy., "Particle swarm optimization with quan- tum infusion for system identification," Engineering Applications of Artificial Intelligence 23 (2010) 635–649.
[38] N. Karaboga, A. Kalinli, D. Karaboga., "Designing digital IIR filters using ant colony optimisation algorithm," Engineering Applications of Artificial Intelli- gence 17 (2004) 301–309.
[39] G.Panda, P.M.Pradhan, B.Majhi., " IIR system identification using cat swarm optimization," Expert Systems with Applications (2011) in press.
[40] Nurhan Karaboga., “A new design method based on artificial bee colony algorithm for digital IIR filters,” Journal of the Franklin Institute 346 (2009)
328–348.
[41] F.Kang, J.Li, Q.Xu., "Structural inverse analysis by hybrid simplex artificial bee colony algorithms," Computers and Structures 87 (2009) 861–870.
[42] B.Majhi, G. Panda., " Development of efficient identification scheme for nonli- near dynamic systems using swarm intelligence techniques," Expert Systems with Applications 37 (2010) 556–566.
[43] L.Li, Y.Yang, H.Peng., "Fuzzy system identification via chaotic ant swarm," Chaos, Solitons and Fractals 41 (2009) 401–409
[44] B.Majhi, G. Panda., " Robust identification of nonlinear complex systems using low complexity ANN and particle swarm optimization techniquem" Expert Systems with Applications 38 (2011) 321–333.
[45] H.Tang, S.Xue, C.Fan., " Differential evolution strategy for structural system identification," Computers and Structures 86 (2008) 2004–2012.
[46] R.Ahmad, H.Jamaluddin, M.A.Hussain., " Application of memetic algorithm in modelling discrete-time multivariable dynamics systems," Mechanical Sys- tems and Signal Processing 22 (2008) 1595–1609.
[47] Ch.H.Liu., Y.Y.Hsu., “Design of a Self-Tuning PI Controller for a STATCOM
Using Particle Swarm Optimization,” IEEE Transactions on Industrial Elec- tronics, Feb. 2010.Volume: 57 Issue: 2.702 - 715.
[48] K.D.Sharma, A.Chatterjee, A.Rakshit., " A Hybrid Approach for Design of Stable Adaptive Fuzzy Controllers Employing Lyapunov Theory and Particle Swarm Optimization," IEEE Transactions On Fuzzy Systems, Vol. 17, No. 2, April 2009.
[49] Ch.F.Juang, Ch.H.Hsu., " Temperature Control by Chip-Implemented Adap- tive Recurrent Fuzzy Controller Designed by Evolutionary Algorithm," IEEE Transactions On Circuits And Systems: Regular Papers, Vol. 52, No. 11, No- vember 2005
[50] Ch.F.Juang, Ch.M.Lu., " Ant Colony Optimization Incorporated With Fuzzy Q-Learning for Reinforcement Fuzzy Control," IEEE Transactions On Sys- tems, Man, And Cybernetics—Part A: Systems And Humans, Vol. 39, No. 3, May 2009.
[51] Ch.F.Juang, Ch.M.Lu, Ch.Lo, Ch.Y.Wang., " Ant Colony Optimization Algo- rithm for Fuzzy Controller Design and Its FPGA Implementation," IEEE Transactions On Industrial Electronics, Vol. 55, No. 3, March 2008.
[52] Ch.F.Juang, Ch.H.Hsu., "Reinforcement Interval Type-2 Fuzzy Controller
Design by Online Rule Generation and Q-Value-Aided Ant Colony Optimi- zation," (2009) Ieee Transactions On Systems, Man, And Cybernetics—Part B:
IJSER © 2011 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 6, June-2011 6
ISSN 2229-5518
Cybernetics Volume: 39 Issue: 6, 1528 - 1542.
[53] John S.Bay.,“ Design of the “Army-Ant” Cooperative Lifting Robot ,”. IEEE Robotics & Automation Magazine, March 1995.
[54] Mondada.F, Gambardella.L.M, Floreano.D, Nolfi.S, Deneubourg.J.L, Dori- go.M.,“ The Cooperation of Swarm-Bots ,”. IEEE Robotics & Automation Magazine, June 2005.
[55] L. Smith, G. K. Venayagamoorthy, and P. Holloway., “ Obstacle avoidance in collective robotic search using particle swarm optimization ,” IEEE Swarm In- telligence. Symp. , Indianapolis, May 2006.
[56] M.Dorigo, M.Birattari, Th.St¨utzle ., “A PSO Based Mobile Robot for Odor
Source Localization in Dynamic Advection Diffusion with Obstacles Envi- ronment ,”. IEEE Computational Intelligence Magazine, pp.37-51,May 2007
IJSER © 2011 http://www.ijser.org