International Journal of Scientific & Engineering Research, Volume 3, Issue 10, October-2012 1
ISSN 2229-5518
Comparison of Underwater Laser Communication System with Underwater Acoustic Sensor Network
Vikrant, Anjesh Kumar, Dr. R.S.Jha,
Abstract
In this paper approach for the underwater sensor network based on the blue-green laser has been proposed. We describe the application of the underwater sensor network in the undersea exploration, and discuss the difficulties in the traditional underwater sensor network. A basic of prototype of underwater laser sensor network has been advanced, which include the architecture of laser network and protocol stack for underwater laser sensor network. Based on the advantages in the underwater laser communication, the underwater laser sensor network has great potential perspective in the undersea exploration.
Key-Words: Underwater sensor network, blue-green laser, laser communication
Introduction
Under water communication has become the need of modern communication worldwide. Submarine to submarine, ship to submarine and satellite to submarine communication has emerged as one of the most challenging and necessary technologies in the present network centric warfare scenario. Radio frequency (RF) and acoustical techniques of underwater communication suffer from various drawbacks such as extremely low data transmission rates (few bps), smaller range, and multi-path reflections and so on. Laser based communication using blue-green lasers is a potential technique for high bandwidth underwater wireless communication because of its high data transfer rate, reasonably large range, small size, low power consumption, immunity to interference and jamming and covertness of transmission. In this paper, we described the various advantageous factors of underwater communication system using blue green laser with practical results over underwater acoustic network. Underwater communication system using blue green laser may be used for transmitting any type of file (Video, Audio, PPT, DOC, PDF and EXE) from one platform to the other.
Underwater Acoustic Sensor Network:

In traditional, the acoustic communication has been developed for the underwater network since World War II. With the exploitation in the sea, more and more underwater acoustic network projects have been carried out. For example, the Georgia Institute of Technology, Massachusetts Institute of Technology, University of Princeton and many other universities already developed some underwater acoustic sensor networks. However, the underwater acoustic signal is influenced by path loss, noise, multi-path, Doppler spread and high variable propagation Author Vikrant is currently pursuing his P.hD in E.C.E. from Singhania University, Rajasthan, India. Ph. +919315159900, Email- dalal.vikrant@gmail.com
Co-Author Anjesh Kumar is working at Laser Science & Technology Centre,
Delhi, India. Email- eranjesh@gmail.com

Co-Author Dr.R.S.Jha is the Supervisor of Vikrant at Singhania University, Rajasthan, India
delay. And the direction of underwater acoustic communication also affect the acoustic link, which means that the different propagation direction has different propagation characteristics, especially with respect to the time dispersion, multi-path spread and delay variance. Hence, the underwater acoustic channel is a temporal and spatial variable system, which makes the available bandwidth limited and dramatically dependent on both range and frequency.
Hereafter some disadvantage factors have been listed that influence acoustic communications in order to state the challenges posed by the underwater channel for underwater sensor networks.
High delay: The signal propagation speed in the
underwater acoustic channel is about 1.5×103 m/sec, which is five orders of magnitude lower than the radio propagation speed (3×108 m/sec). The large propagation delay seriously reduces the throughput of the system considerably, and also determines the unstable in the underwater control network system.
Limited bandwidth: The acoustic band underwater is very
little due to absorption, so most acoustic communication system operates below 30 KHz. As a result, the bandwidth of underwater acoustic channels operating over several kilometres is about several tens of kbps, while short range system over several tens of meters can reach hundreds of kbps.
High bit error rate: Because of path loss, multi-path fading,
Doppler spread, and noise (from man and ambient) in the underwater acoustic channel, there is a large bit error rate in the underwater acoustic channel, which is on the order of 10-2-10-5
High energy consumption: The power consumed in the
underwater acoustic communication is more than in the terrestrial radio communication, because more power is consumed in the complex signal processing at receivers to compensate for the impairments of the channel. Affected by the above factors, the current underwater acoustic sensor network just provides the limited communication for
IJSER © 2012 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 3, Issue 10, October-2012
ISSN 2229-5518
different application, which can realize the information
communication among the different sensor nodes without any quality of services.
At the same time, the above factors cause the efficiency in the underwater acoustic sensor network to be very low and the complexity of protocol stack to be high.
Underwater Laser Sensor Network:
In order to overcome the disadvantages in the underwater acoustic sensor network, a new approach for underwater sensor network which is in the most happening area of research these days is:-
Blue-green laser in the underwater communication
Most of laser can not penetrate through the sea due to be absorbed by the sea, but the blue-green laser (the length of wave is about 470 ~ 570nm) has the minimum energy fading in the sea, whose fading rate is about 0.155~0.5db/m. Hence, the blue-green laser can propagate from several hundreds of meters to kilometres in the sea, and this feature of blue-green laser in the sea is said the window effect. Based on the window effect of blue-green laser, some submarine communication systems have been developed. In these communication systems, the blue-green laser is a collimated laser beam, which should be aimed at the submarine when sender tries to communicate with submarine.
A basic blue green laser system may be understood as below:
Basic Theory: Point to point laser communication can be characterized by equation (1)
 ……. (1)
……. (1)
Where P(r) are the received power and P (t) is the transmitted power respectively , R(r) is receiver optics diameter , R(t) transmitter optics diameter, R link range(in
Km), 𝜽 is the beam divergence and α is the attenuation
factor(dB/Km).Receiving power is varying linearly with
transmitting power and receiver area. Propagation losses
and link integrity are accounted by attenuation factor α. Design parameters P(t), θ, R(r) and R(t) can be chosen to achieve the desired range. Attenuation in the sea water increase exponentially with increase in link range
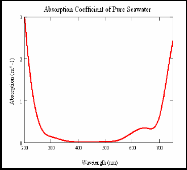
Laser propagation in sea water can be understood by the graph between absorption coefficient and wavelength (Fig.
1) given above. Sea water has transmission window between blue-green region and it varies with geographical location, distance from the sea coast and depth below sea surface. The attenuation coefficient acquires a constant value below 200m of the sea surface. Blue laser is suitable for deep sea water and green is suitable for coastal sea water.
Generalized
communication System and protocol: A generalized full duplex
communication system is comprised of three parts: Transceiver units, user interface and communication channel. Transceiver is the combination of transmitter and receiver units. In case of a RF communication system, baseband signal modulates high frequency carrier to embed the information for transmission and at receiver end, carrier signal is demodulated to recover the embedded information. Light is also a constituent of EM spectra like radio wave but has frequency in THz range (1 Terahertz = 1 trillion cycles per second) and also act a carrier for embedded information but it can’t be modulated like RF carrier wave as at present no optical receiver exist to process THz frequency signal. Modulation of light can be done in many ways like phase modulation using interferometer, Pulse position modulation (PPM) intensity modulation etc. but intensity modulation is the most prominent modulation scheme used in Laser communication for free space and underwater communication. Sometime information embedded sinusoidal carrier is directly used to modulate the intensity of the laser and at the detector information laden carrier can be re produced and further demodulated or process as normal RF operation. But base band signal after digitalization can be used directly to modulate the laser without superimposing it on sinusoidal carrier and it is popularly known as OOK(on off key) .Mode of communication ( Asynchronous or Synchronous) also play a very important role in digital communication. Synchronous communication (like RS 422/485) is faster and requires synchronization clock pulses to synchronize transmitter and receiver and it is mainly used for wired communication. Asynchronous communication bit slower than synchronous but it simplifies the problems of complex synchronization between transmitter and receiver hence it is suitable for wireless as well as wired communication. Most common protocol for asynchronous communication is RS 232. RS 232 is a standard interface approved by EIA (Electronic Industries Association) for connecting serial devices, specifies signal voltages, signal timing, signal function, a protocol for information exchange and mechanical connectors. To ensure reliable communication and to enable the interconnection of equipment produced by different manufacturers, the interfacing standard RS-232 was set by EIA in 1960. Since then it has gone through a number of modifications, including a change in its name. RS-232A, RS-232B, RS-232C, EIA-232D and EIA-232E are the subsequent versions of this standard. The standard has been referred to as RS-232 (instead of EIA-232) throughout this article due to its popularity.
IJSER © 2012 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 3, Issue 10, October-2012 3
ISSN 2229-5518
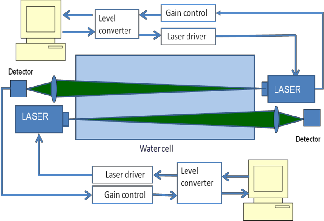
System description: Overall system design: Our optical transceiver system is consisting of a frequency-doubled diode-pumped solid-state laser (DPSSL) emitting at 532 nm with processing electronics unit as optical transmitter and semiconductor detector with processing unit as receiver. Laser beam is transmitted after reflection from two adjustment mirrors placed just after the laser and final is made to pass through beam collimator (5X) to control the laser beam divergence and spot size at receiver. To simulate the underwater communication in the lab, a glass water cell of the W X H X L is fabricated. A path length of 10 m between two transceivers is achieved after multiple beams folding in the water cell. The provision for creating the turbulence is also kept using a water churning motor. Electronics processing unit: Transmitter electronics module is comprise of level converter followed by a buffer to make RS 232 signal level compatible with laser driving TTL signal. At the receiver, detector output is passed through a comparator to compensate the laser beam attenuation and followed by level converter to make inverted TTL signal compliant to RS 232 level.
sequence is re-transmitted to first end. If the sequence is
same, system is aligned and ready for the file transmission. Raw file formats like notepad or word pad can be transmitted at higher data rates in comparison to other formats. Data rate is also protocol dependent and can be seen Z modem protocol supports higher baud rates in comparison to Kermit but the probability of transmission error is less in Kermit in comparison to Z modem. Effect of ambient light at the detector is catered using inverted comparator to some extent. The system is also equipped with independent transceiver testing without making laser on.
Water attenuation measurements: Water attenuation
measurement experiments were carried out for actual sea water and normal tap water in lab. Experimental setup for attenuation measurement comprises of three components: water cell, laser of known power and power meter. Laser is made to pass through water filled cell and on the other end power is collected and made to fall on power meter. Experiment is repeated number of times and finally R.M.S value is calculated. In our case, 200mW laser at 532 nm is used a source. Separation between source and the power meter (placed on other side) is approximately 3 meter. Experimental values are indicated in the bar chart. R.M.S value of attenuation factor is
1.02
1.01
1
0.99
0.98
0.97
0.96
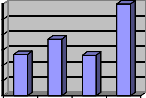

ReadingReadingReadingreading
Received power
(mW)
1 2 3 4
Fig.2 Block diagram of overall system
Operation: As the designed system is working in a full duplex hand shaking mode, both transceiver human interfaces (PCs) are set at same baud rate and common packet formats. Selection of baud rate is solely depending upon the laser on-off stabilized rate. Laser on-off stabilized rate signifies the no. of missing/distorted pulses per second at a particular specified rate and it adds to bit error rate (BER).It is very common to observe that generally laser supports lower stabilized on-off rate in comparison to specified rate. Designed system can support data rates up to 100 kbps but the limiting factor is stabilized on–off rate of the laser and should be checked before integrating the laser in system. After matching the baud rates and data formats, alignment of both transceiver systems is checked in the chat mode. A sequence of the character is transmitted from one end and from the other end received character
Result: Underwater communication system has been developed and tested over a water channel of 10 m length at a data transfer rate of 10 kbps. The system is capable of transmitting different formats of Video, Audio, image and text files from one platform to the other. This system is also equipped with independent transceiver testing option.
CONCLUSION: The underwater laser communication system is capable of transmitting different file formats of Video, Audio, Image and text file and supports data rates up to 80-100 kbps. In the present setup, the limiting factor is the laser TTL modulation rate. The use of avalanche photo diode (APD) and suitable inverted TTL comparator can help in increasing the range (path length) of the system.
References:
[1] YINGZHUANG LIU, XIAOHU GE, “Underwater Laser sensor network: A New Approach for Broadband Communication in the Underwater”, Proceedings of the 5th WSEAS International Conference on Telecommunications and Informatics, Istanbul, Turkey, May 27-29,
2006 (pp421-425)
IJSER © 2012 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 3, Issue 10, October-2012 4
ISSN 2229-5518
[2] E. M. Sozer, M. Stojanovic, and J. G. Proakis. Undersea Acoustic Networks. IEEE Journal of Oceanic engineering, OE-25(1) pages: 72–83, January 2000.
[3] M. Stojanovic, Acoustic (underwater) communications, in: J.G.
Proakis (Ed.),
Encyclopedia of Telecommunications, Wiley, New York, 2003.
[4] I. Vasilescu, P. Varshavskaya, K. Kotay, and D. Rus, Autonomous Modular Optical Underwater Robot (AMOUR): Design, Prototype and Feasibility Study, International Conference on Robotics and Automation, Barcelona, Spain, April 2005.
[5] Krill: An Exploration in Underwater Sensor Networks Vasilescu, I.; Kotay, K.; Rus, D.; Overs, L.; Sikka, P.; Dunbabin, M.; Chen, P.; Corke, P.; Embedded Networked Sensors, 2005. EmNetS-II. The Second IEEE Workshop on 30-31 May 2005 Page(s):151 – 152
[6] I. F. Akyildiz, D. Pompili, and T. Melodia. Underwater Acoustic
Sensor Networks:
Research Challenges. Ad Hoc Networks Jounal (Elseviier), March 2005.
[7] http://www.mit.edu/people/millitsa/research.htm l
[8] http://www.princeton.edu/dcsl/aosn/
[9] L.W.Wright. Blue-green lasers for surmarine communications, Naval Engineers Journal, 1983, 95(3), pages: 173~177
[10] T.F.Wiener, S.Karp. The role of blue-green laser systems in strategic submarine communication. IEEE Trans.Commun., 1980, Com-28(9) pages:1602~1607
[11] M. Chitre, S. Shahabudeen and M. Stojanovic, "Underwater Acoustic Communications and Networking: Recent Advances and Future Challenges," The State of Technology in 2008, vol. 42, no. 1, pp.
103-114, Spring 2008
[12] M. Stojanovic, "Recent advances in high-speed underwater acoustic communications," IEEE Journal of Oceanic Engineering, vol.
21, no. 2,pp. 125-136, Apr. 1996.
[13] J. G. Proakis, E. M. Sozer, J. A. Rice, and M. Stojanovic. Shallow
Water Acoustic Networks. IEEE ommunications Magazine, pages 114–
119, November 2001.
IJSER © 2012 http://www.ijser.org