International Journal of Scientific & Engineering Research, Volume 4, Issue 4, April-2013 574
ISSN 2229-5518
Comparing the Methods Used to Detect the Signs
Sina Layazali, Yaser Ahangari Nanehkaran, Sajjad Bagheri Baba Ahmadi
Abstract— Today in the world of technology many applications have been introduced to detect the particular objects from captured images for different goals. One of these programs that need contribution of software and hardware together, is road sign detection that has ability to recognize the road signs automatically in traffic scene images. In this article our main goal is to compare methods that are used in this field such as neural network or other classification techniques which have being improved and to present the advantages and disadvantages of the methods. This comparing comprises the three following steps: road sign detection, classification and GUI. GUI performs as a bond between users and the algorithm, which can detect the signs. In fact GUI makes a proper situation for user to work with the system. Moreover, the actual imaging processing comprises color space transforming and color thresholding that is used to determine the presentation of the road signs unerringly.
Index Terms— Computer Vision, Road / Traffic sign classification, ANN, SVM and KNN
—————————— ——————————
arning drivers, speed control and make safer situations for drivers or passengers, detection of road
sign and disburden the drivers are the main tasks of road sign recognition system. However, the most important duties of this system are to recognize the signs and identify them. The system with these features should analyze the road scene image captured by the camera mounted in the vehicle, extract the road sign region and make intelligent decisions. In addition, it must appropriately alert the driver of the road sign. The efficiency and speed of the detection play important role during system processing. To recognize traffic signs, various methods like Neural network for automatic traffic sign identification have been developed and shown promising results. Road sign detection systems that have been developed usually follow two special steps that are related to the detection and recognition of the detected signs, which deals with the interest of performance in an artificial neural network.
In this section, system should finds the road signs from the complex background that has been captured by camera mounted on vehicle based on the shape and color. Resizing the potential objects and being used as inputs are in following steps.![]()
Sina Layazali is master student of Computer Engineering, Çankaya
University in Ankara, Turkey. PH: +905396179002
Email: sinalayazali@yahoo.com
Yaser Ahangari Nanehkaran is master student of Information Technology, Çankaya University in Ankara, Turkey, PH: +905545058732
Email: y.ahangari@yahoo.com
Sajjad Bagheri Baba Ahmadi is master student of Computer Engineering, Çankaya University in Ankara, Turkey, PH: +905436977943
Email: sajad_bagheri67@yahoo.com
To recognize the signs based on their colors color, segmentation process plays a vital role that can extract out the signs from background. Today many methods have been developed based on color that shown promising results.
Color Neural network: to cluster and recognize the patterns base on colors, neural networks should be trained.
Color Thresholding Segmentation: Based on this
rudimentary technique pixels of each images are classified into two listed group: object pixels or
„background pixels.
HSI / HSV transformation: HIS/HSV value can be got from RGB spaces. Two values of HIS space called the hue coordinate, and intensity coordinate captures varying light conditions represent hued information of captured images.
However, there is main drawback about f color based detection which has bad effect made by outdoor illuminator on road signs. Most color-based techniques run into problems when the illumination source varies with both intensity and color. This is the main reason why many researchers have tried to come up with algorithms for separating the incident illumination from the color signal perceived by the imaging sensors.
The most important technique to detect the sign is shape based detection. However, this method compared with previous method, is incomplete. Unlike the color based detection, in this method many issues should be considered in:
Sign may appear in cluttered scenes
Imperfect shape
Variance in scale and size
Because of using some techniques like edge detection and matching algorithm methods, shape detection have more
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 4, April-2013 575
ISSN 2229-5518
resistance to changing illumination. The common recognition
approaches based on shape are:
Shape Neural Network: This approach usually used in conjunction with neural network. In other words, this method used as a complementary with color neural network. Neural nets can be used to match a shape of an input object by using the threshold value.
Template Matching: Normalized cross-correlations
compare all templates that are stored in database with each potential signs that are normalized in specific size. This method is the fast among others and can easily be modified to include new classes of signs.
Similarity Detection: It is supposed that, both sample and segmented image are in the same dimension. The aim of this method is to compute the similarity between segmented region and signs changed to binary image based some features.
used to search scene image for the geometrical shapes, which may correspond to the road signs. In HSFM, local orientations of image edges and hierarchical templates are used for shape detection. The algorithm input is the traffic scene image and the output is a list of candidate regions. It uses Sobel processors to extract the edge information.
A growing number of solutions have been proposed for road sign detection since then. In general, those solutions include detection phase and classification phase.
Detection subsystem is to search for corresponding road signs.
Classification is to evaluate regions found by the detection subsystem.
To classify any captured images, system should follow three essential steps: Data fetching, preprocessing, feature extraction, classification and post-processing. Among the phases, preprocessing which correct failure data or prepare them for following steps is the prior steps. Also, in this step, the principle task in preprocessing the captured data is to alleviate the variation because of more variation, decreasing the recognition rate and more complexities will be happened. All signs extracted out the images and detection stage generates the small images called Region of Interest (ROI). Each ROI will be valuable parameter input to Recognition Stage which is the final part. Applying image classification, without Artificial Intelligence and Image processing is
impossible.
One of the most important of image processing is removing the noises occurring during capturing or transmitting to other spaces. There are many methods such as median filter, wiener filter and fuzzy filter and linear smoothing filter that can remove the noises. Any mathematical operation directly on the image matrix is spatial filtering. Any of the two types may be used: Linear-spatial filters or Non-linear spatial filters. Spatial filtering is the process of dividing image into its constituent spatial frequencies, and selectively altering certain spatial frequencies to emphasize some image features. This technique increases the analyst’s ability to discriminate detail. Generally the types of spatial filters that may be used in image pre-processing are: Low pass filters and High pass filters.
This method blur images to prevent stain made by pixel intensity values that are higher and lower than others and each pixel is set to average value of itself and its neighbors.
The wiener filters perform smoothing base on the local image variance. Litter smoothing filter is performed for large variance function and vice versa. Comparing with previous method, Adaptive filter has promising results.
That’s a kind non-linear filter. More suitable design, more details of image will be preserve. To run a median filter:
1. Consider each pixel in the image
2. Sort the neighboring pixels into order based on their intensities
3. Replace the original value of the pixel with the median value from the list.
Fuzzy filters cope with some drawbacks of classical filters and can recover the images corrupted by noises with promising results. Each pixel in the image is represented by a membership function and different types of fuzzy rules that considers the neighborhood information or other information to eliminate filter removes the noise with blurry edges but fuzzy filters perform both the edge preservation and smoothing.
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 4, April-2013 576
ISSN 2229-5518
The first step of recognition is to extract the edges. The generalized form of edge detection is gradient approximation and thresholding some edge and corner detection such as Sobel filtering and Canny edge that can edges by changing in intensity.
Sobel filtering is a kind of gradient method that computes the maximum and minimum of edges. Except of this method, The Laplacian method is introduced that searches for zero cross-
-ings in the second derivative of the image to find edges.
Generally, the most edges occur where there is a striking steep gradient in the images or disjunction happened in the intensity function.
K-NN for classifying the samples should search the spaces to find the K training samples which are the closet sample to given sample. In fact, an object is classified by a majority vote of its neighbors. The image after being recognized by assigning to the specific label which closet points belong
should be normalized to certain value. For computing the
closest sample, Euclidean distance is useful. Euclidean
distance between two points X= (xl , x2 , … , xn ) and Y= (yl , y2 , … , yn ) is
The main task of the classification module is to cluster the![]()
d (X, Y) = J∑n
(xi − yi )2
extracted ROI. Different techniques in image classification like Artificial Neural Networks (ANN), Support Vector Machines (SVM), Fuzzy measures, Genetic Algorithms (GA), Fuzzy support Vector Machines (FSVM) and Genetic Algorithms with Neural Networks are being presented for road sign recognition and classification.
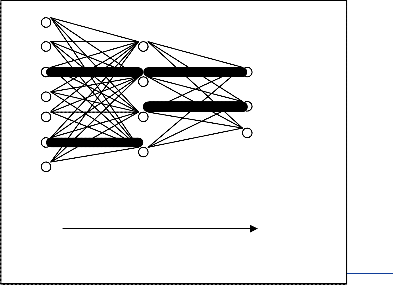
ANN which is parallel distributed processor has ability to store the acquisition knowledge and to be trained to recognize the signs. Based on color, neural networks which reduce the color resolution of images to a universal palette of eight colors can recognize ROI. In addition, neural network can be used to match the shape of captured images. When systems face with some problem like high dimensionality noisy, complex, imprecise, and imperfect or error prone sensor data and lack of a clearly stated mathematical solution or algorithm, this method have proper solution to solve them.
Input Units Hidden Units Output nits
Based on the training data, SVM produce the model which can anticipate the target values of the test data only the test data attributes. A classification task usually involves separating data into training and testing sets. Each instance in the training set contains one target value" (i.e. the class labels) and several attributes" (i.e. the features or observed variables).
This system should find optimal separating hyper plan
between two data by maximizing the margin between the classes. Before that, kernel function should transform the data into a higher dimensional where data which are the nearest to the construct line introduced as the support vectors.
As it is obvious in this article we’ve focused on different kinds of methods used in road sign detection. During trend of detection of images some steps should be followed such as: segmented into some regions based on the color-values of each pixel, to label the images and marking the region as a region of interest.
[1] Tang Jin; Liang Xiong; Xie Bin; Chen Fangyan; Liu Bo,” A method for traffic signs detection, tracking and recognition “,IEEE International conference (ICCSE), 2010
[2] Auranuch Lorsakul1 and JackritSuthakorn ,”Traffic Sign Recognition Using Neural Network on OpenCV: Toward Intelligent Vehicle/Driver Assistance System“,4th International Conference on Ubiquitous Robots and Ambient Intelligence
,2007.
[3] P. Gil-Jim´enez, S. Lafuente-Arroyo, S. Maldonado-Basc´on,and
H. G´omez-Moreno,” Shape Classification Algorithm Using
Figure No.1. Schematic Diagram of a Neural Network
R © 2013 ww.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 4, April-2013 577
ISSN 2229-5518
Support Vector Machines for Traffic Sign Recognition“, LNCS
3512, pp. 873–880, 2005.
[4] Robert E. Uhrig ,”Introduction To Artificial Neural Networks”, Proceedings of the 1995 IEEE IECON 21st International Conference ,1995
[5] [9] M.Seetha, Muralikrishna, B.L. Deekshatulu, B.L.Malleswari, Nagaratna, P.Hegde, “Artificial Neural Networks and Other Methods of Image Classification”, Journal of Theoretical and Applied Information Technology, 2008.
[6] Yong-JianZheng, Werner Ritter, ReinhardJatnssen,”An Adaptive System For Traffic Sign Recognition”, Intelligent Vehicles '94 Symposium, 24-26 Oct. August 2002
IJSER © 2013 http://www.ijser.org