International Journal of Scientific & Engineering Research Volume 2, Issue 6, June-2011 1
ISSN 2229-5518
A Multi-Agent Based Autonomous Traffic
Lights Control System Using Fuzzy Control
Yousaf Saeed, M. Saleem Khan, Khalil Ahmed, Abdul Salam Mubashar
Abstract— This research work presents an application of fuzzy logic for multi-agent based autonomous traffic lights control system using wireless sensors to overcome problems like congestion, accidents, speed and traffic irregularity. The proposed agent based approach can provide a preferred solution by minimizing the vehicle waiting time especially the emergency vehicles using fuzzy logic control under situations that normally occur during emergency. The effectiveness of this approach is tested by taking two traffic junctions.
Index Terms— Traffic lights control system, application of fuzzy logic, autonomous sytems, congestion control, FGPA based microelectronic chips, multiple emergency vehicles, and multi-agents based autonomous traffic control.
—————————— • ——————————
1 INTRODUCTION
RBAN areas nowadays have a great deal of traffic jams especially when a number of junctions are tak- en into consideration. Air and noise pollutions, acci-
dents, time wastage and so many other factors are of se- rious concerns in traffic. There are many other methods of controlling traffic lights in junctions to minimize the amount of traffic. Traffic can be detected by traffic light controller intelligently [1]-[2]. The use of fuzzy logic con- trol in traffic signals are essential and plays an important role, however, when network intersections are concerned, the control problem occurs which is an important issue in traffic engineering [3].
S. Coleri, S. Y. Cheung and P. Varaiya et al discussed the various sensor networks for monitoring traffic [4]. I. F. Akyildiz, W. Su, Y. Sankarasubramaniam, and E. Cayirci, worked on a survey on sensor networks used for traffic control system [5]. A. N. Knaian developed a wireless sensor network system for smart roadbeds and intelligent transportation using wireless sensor package to instru- ment roadways for Intelligent Transportation Systems. The sensor package counted passing vehicles, measured the average roadway speed, and detected ice and water on the road. Clusters of sensors can transmit this informa- tion in near real-time to wired base stations for use, con- trolling and predicting traffic, and in clearing road ha-
————————————————
• Mr. Yousaf Saeed is a Ph.D. Scholar in the field of Computer Sciences at National College of Business Administration and Economics NCBA& E, Lahore, Pakistan (e-mail: usafonline.email@gmail.com)
• Dr. M. Saleem Khan, Director Computer Science Department is with
GC University, Lahore, Pakistan (e-mail: mskgcu@yahoo.com)
• Dr. Khalil Ahmad, Director Computer Science Department National
College of Business Administration and Economics (NCBA& E), Lahore,
Pakistan (e-mail: ahmedkhalil08@gmail.com).
• Mr. Abdul Salam Mubashar is doing Research in the field of Computer
Science at National College of Business Administration and Economics
(NCBA&E), Lahore, Pakistan (e-mail: salammunim@yahoo.com)
zards [6]. W. J. Chen, et al proposed a real time dynamic traffic control system based on wireless sensor network [7]. M. Tubaishat, et al developed an adaptive traffic light control with wireless sensor networks and discussed var- ious scenarios [8]. Y. Lai, et al discussed the protocols for traffic safety using wireless sensor network and described the design and implementation of energy-efficient proto- cols that can be used to improve traffic for an intelligent traffic management system deploying low-cost wireless sensor nodes on the roadbed and worked collaboratively to detect potential collisions on the road [9].
In this proposed research work, two junctions are dis- cussed and brought into focus along with the use of wire- less sensors as many studies suggest the use of sensors. There are no traffic lights control system in these junc- tions and huge amount of traffic causing wait time and accidents. As a result, physical existence of traffic police is always required there which is inappropriate due to availability of technology today. Also, due to heavy traffic in these two junctions, emergency vehicles face hardships when they pass from there. The two junctions have been divided into different directions and separations with installation of traffic lights control system and wireless sensors. Regarding traffic flow conditions on these junc- tions, per minute minimum 50 and maximum 115 ve- hicles passes by. The proposed Multi-Agent Based Auto- nomous Traffic Lights Control System uses Fuzzy logic Control system to overcome problems like congestion, accidents and speed to minimize the vehicles waiting time especially under emergency conditions.
The framework of this paper consists of: overview of mul- ti-agent based autonomous traffic lights control system in section II, in section III design model of fuzzy logic based traffic control system is discussed, in section IV design algorithm of fuzzy based traffic system is discussed, in section V, simulation results are discussed and in section
•
IJSER © 2011 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 6, June-2011 2
ISSN 2229-5518
VI, conclusion results are discussed.
2 OVERVIEW OF MULTI-AGENT BASED AUTONOMOUS TRAFFIC LIGHTS CONTROL SYSTEM
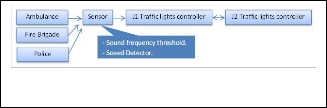
For inputs, three agents have been taken that include po- lice, ambulance and fire brigade vehicles. Upon arriving, they will set their route on Global Positioning System (GPS) first, which will be located in their vehicles. Once the route is set, they will start moving on their proposed route while switching on their emergency lights and spe- cific emergency siren. Sensors will be located at a specific distance before the junctions which will detect the speed and sound waves of siren at a particular threshold. Based on the speed, sensors will communicate wirelessly with the traffic control system of the two junctions while rea- lizing their routes. On that basis traffic control systems of the two junctions will be able to minimize the traffic flow by inter-communication thus assigning the right time for red and green lights so that emergency vehicles can pass quickly. Fig.1 shows the block diagram of multi-agent based traffic control system. In case of more than one emergency vehicle coming from different directions, the traffic control system will be able to avoid collisions.
er a police vehicle coming towards junction J1 having its route defined and will pass through roadways w3 and w7 having road codes 00002 and 00004 respectively. Finally, we consider a fire brigade vehicle coming from the right side of junction J2 having its route defined and will pass through the road ways w11 and w5 having road codes
00006 and 00003 respectively.
Also, the speed of ambulance is detected by the sensor
S1 which is 80 km/h, the speed of police vehicle is de-
tected by sensor S2 which is 60 km/h and the speed of
fire brigade is detected by sensor S3 which is 40 km/h.
Each of these wireless sensors has been installed at 500m
away from the junctions. However, the total distance be-
tween sensors S1 and S3 is 1.5 km. The expected time of
these emergency vehicles are found with the help of the
following formula:
Distance (s) = Velocity (v)/ Time (t)
or
Velocity (v) = Distance (s)/ Time (t)

Fig.1. Block diagram of the proposed system
3 DESIGN MODEL OF FUZZY LOGIC BASED TRAFFIC CONTROL SYSTEM
The two junctions have been categorized as J1 and J2 as shown in Fig. 2. Wireless sensors S1, S2 and S3 have been used which are installed 500m away from the junctions. We are considering three emergency vehicles, ambulance, police and fire brigade, coming from three different direc- tions at the same time with different speed ratio. Based on their speed detected by the sensors, two actions are per- formed. One, traffic flow is minimized on their routes so that they can pass by with their maximum possible speed and secondly, their collisions are avoided. In this scena- rio, first we consider an ambulance coming from the left side of Junction J1 having its route defined straight ahead. It will pass through roadways w1 and w7 with road codes 00001 and 00004 respectively. Secondly, we consid-
Fig.2. The proposed scenario of the two junctions.
4 DESIGN ALGORITHM OF FUZZY BASED TRAFFIC SYSTEM
The data at junction J1 containing sensors, traffic flow, road ways and traffic light status which is G for green and R for red are given in Table 1, however, yellow light has been ignored as it is marginal in this case and our main focus is on the green time to move the traffic as much as possible during the arrival of emergency ve- hicles.
IJSER © 2011 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 6, June-2011 3
ISSN 2229-5518
TABLE 1
DATA OF JUNCTION J1
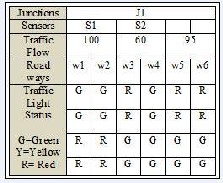
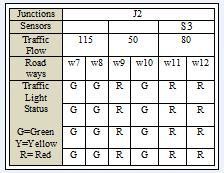
Table 2 shows the data at junction J2 containing sensors, traffic flow, road ways and traffic light status which is again G for green and R for red.
TABLE 2
DATA OF JUNCTION J2
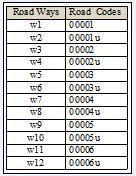
As each road has been assigned a special code, for u-turn there is ‘u’ written after the code, however, without the term ‘u’ means straight path. Also, categorization in the form of roadways and road codes has been defined in Table 3.
TABLE 3
ROADWAYS WITH THEIR RESPECTIVE ROADCODES
The code 00001 for instance contains five digits in which the first digit defines the existence of emergency vehicle. It is basically ON and OFF. If the code is in the form
00001, it means no emergency vehicle is detected whereas the code 10001 means that we have an emergency vehicle on this route.
The second digit defines the existence of ON and OFF of traffic light, which is 1 for green and 0 for red. For in- stance, the code 00001 means traffic light status is red on that route and 01001 means traffic light status is green on that particular route.
In case of emergency vehicle coming towards the road having code 00001 for instance will be of the form 11001 which again indicates the existence of emergency vehicle on the route and traffic light signal status which is green.
Upon getting all those relevant data, simulation software MATLAB is used for fuzzy control. Membership func- tions for both inputs and outputs have been defined in Table 4 and Table 5.
TABLE 4
INPUT MEMBER FUNCTIONS
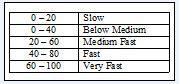
TABLE 5
OUTPUT MEMBER FUNCTIONS
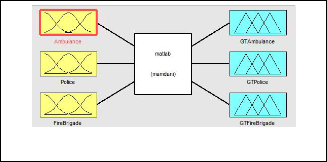
Three inputs in the form of ambulance, police and fire brigade vehicles with their green time as their outputs are shown in Fig. 3.
Fig. 3. Inputs and outputs
IJSER © 2011 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 6, June-2011 4
ISSN 2229-5518
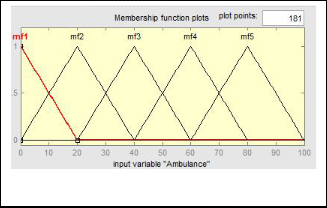
Five membership functions for each of input and output have been created. Fig. 4 shows the membership func- tions for input variable “Ambulance”.
Fire brigade vehicles and output: Green time for ambul- ance.
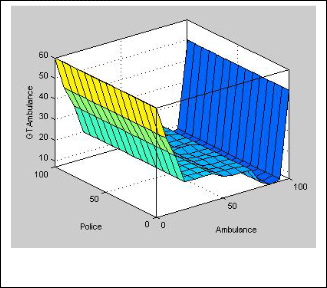
Fig. 4. Membership functions with their respective range.
A total of 60 rules have been generated. Rules were de- fined first by considering a single emergency vehicle with all possible speeds. Rules were then defined by consider- ing two emergency vehicles with all possible speeds and finally, rules were defined for three emergency vehicles with all possible speeds. Moreover, by assigning the speed of our inputs, the rule viewer shows the respective green time for our outputs.
5 SIMULATION RESULTS AND DISCUSSION
Simulation software MATLAB generated rules in rule viewer shown in Fig. 5 on the basis of our data and finally surface view has been generated.
Fig. 6. Surface view for Ambulance and police vehicles.
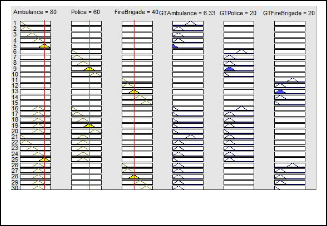
Fig. 7. Surface view for Ambulance and Fire Brigade vehicles.
Fig. 5. MATLAB rule viewer.
Two surface views has been shown here that indicates the effect of output.
Fig. 6 shows a graph between the inputs: Ambulance and
Police vehicles and output: Green time for ambulance.
Fig. 7 shows a graph between the inputs: Ambulance and
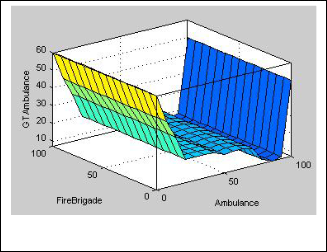
6 CONCLUSION RESULTS AND DISCUSSION
Using proper data collection for the two junctions and proposing a traffic control system for multi-agents, the emergency vehicles passes from these two junctions quickly facing less traffic and at the same time collisions are avoided in case of multiple emergency vehicles com- ing from different directions.
In case of new emerging algorithms and hardware tech- nology, the proposed system will be flexible enough to be enhanced in order to handle future traffic aspects using FPGAs based Microelectronics chips to control traffic sig- nals.
IJSER © 2011 http://www.ijser.org
International Journal of Scientific & Engineering Research Volume 2, Issue 6, June-2011 5
ISSN 2229-5518
ACKNOWLEDGEMENT
This research work was carried out in the laboratories of NCBA&E and GC University, Lahore, Pakistan. We must acknowledge the support of fellows of research group and laboratories personals for their co-operation and en- couragement.
REFERENCES
[1] Cheonshik Kim, You-Sik Hong. "Traffic signal using smart agentsystem" American Journal of Applied Sciences, 2008: 1487-
1493.
[2] Tzafestas et al. "Advances in Intelligent Autonomous Systems: Microprocessor based and Intelligent Systems Engineering" Kulwer Academic Publishers, 1999.
[3] Skowronski, W., L. Shaw. "Self-learning fuzzy traffic controller for a traffic junction. I.” European Congress on Intelligent Tech- niques and Soft Computing-EUFIT 93, Aachen, Germany, 1993:
751-761.
[4] S. Coleri, S. Y. Cheung and P. Varaiya. "Sensor networks for monitoring traffic" Proceedings of the 42nd Annual Allerton Confe- rence on Communication, Control and Computing 2004, pp. 32-40.
[5] I. F. Akyildiz, W. Su, Y. Sankarasubramaniam, and E. Cayirci. "A survey on sensor networks" IEEE Communications Magazine, Vol. 40, 2002, pp. 102-114.
[6] A. N. Knaian. "A wireless sensor network for smart roadbeds
and intelligent transportation systems" Technical Report, Electric- al Science and Engineering, Massachusetts Institute of Technolo- gy, June 2000.
[7] W. J. Chen, L. F. Chen, Z. L. Chen, and S. L. Tu, "A real time dynamic traffic control system based on wireless sensor net- work" Proceedings of the 2005 International Conference on Parallel Processing Workshops, Vol. 14, 2005, pp. 258-264.
[8] M. Tubaishat, Y. Shang, and H. Shi. "Adaptive traffic light con- trol with wireless sensor networks" Proceedings of IEEE Consum- er Communications and Networking Conference, 2007, pp. 187-191.
[9] Y. Lai, Y. Zheng, and J. Cao. "Protocols for traffic safety using wireless sensor network" Lecture Notes in Computer Science,
Vol. 4494, 2007, pp. 37-48.
IJSER © 2011 http://www.ijser.org