International Journal of Scientific & Engineering Research, Volume 6, Issue 4, April-2015 192
ISSN 2229-5518
AUTOMATED GUIDED VEHICLE
Manali Pohare, Ashok Shinde and Prashant Borkar student, MMIT under the guidance of Prof Snehal Koparde
—————————— ——————————
.
IJSER © 2015 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 6, Issue 4, April-2015 193
ISSN 2229-5518
1. INTRODUCTION
AGV in industries consists of only one partially autonomous vehicle that is directed around a fixed guided path using central PC. The system may be complex, in fact inflexible. Using advances in modern autonomous vehicles and multi robot methodology a decentralized system with multiple free navigating systems may be deployed. Such a system can enable truly flexible material handling. The basic function of AGV are divided into two systems namely navigation and load transfer. The system navigation can again be divided into navigation and traffic management. This project basically concentrates on system navigation. In a decentralized navigation system each AGV decides which manufacturing station has to be given service. The navigation system was developed for investigating the larger projects addressing all aspects of AGV functionality and was adapted for the need of such systems. Traditional robot control methods were used for robot control .But this systems were slow to cope up with dynamic environment and frequent environmental changes. These drawbacks were neglected by adapting responsiveness to stimuli and forgiving the modeling stage.
Robots are smart machines that can be programmed and
work more accurately and more precisely used in industrial fields, manufacturing processes medical fields etc. The robots perform hard, dangerous and accurate work in order to make our life easy as they can work for hours without taking rest. They can work without making errors in very less time. The idea of this research is to exploit robotics usage on healthcare field to help mobility disabled people.
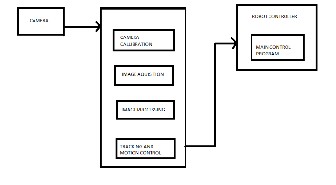
2. FUNCTIONAL BLOCK DIAGRAM
Cameras is placed on the top to acquire a bird eye view image to
track the path of the vehicle .To detect the vehicle we will stick a red color strip on the vehicle. Thresholding will be applied to detect the red color and track the motion of the robot. GUI application will be provided to trace the path. One RF module will be connected to PC and other will be connected to the microcontroller which will recognize the command and will move the vehicle forward, left, right.
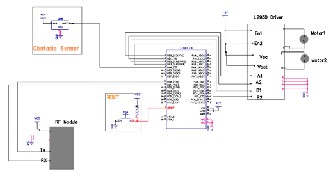
In our circuit diagram there are two parts namely robot assembly
and PC. We will see both of them in detail:-
10K resistor. 10 and 30 pins are VCC so connected to 5V. Pins
11, 31 are ground pins. Motors cannot connect to Microcontroller directly as they are of high powers, we have isolated motors with Motor driver circuit that is L293D. RF module CC2500 works with serial protocol so connected to TX, RX pins of Microcontroller. IR based sensor is interfaced for obstacle detection.
IJSER © 2015 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 6, Issue 4, April-2015 194
ISSN 2229-5518
RF module. RF module can connect to PC through USB to serial
converter.
3. CONCEPTUAL UNDERSTANDING OF RF MODULE AND IR SENSOR .
RF MODULE: RF module has a low power consumption and high sensitivity. It has integrated data filters. The operating range of RF module is -40 to85 degrees Celsius. It uses the ISM frequency band and operates at frequency approximately equal to
2.4 GHz. Also it has high accuracy.
IR SENSOR:
IR sensor is basically used to detect the obstacle. It transmits the signal in one direction and the signal bounces back from the surface of the obstacle and thus the obstacle is detected. It has adjustable range with a POT. The operating range of IR sensor is
5V. Its sensitivity is 30cm which is adjustable.

ALGORITHM:
1. Start
2. Microcontroller Initialization
3. USART Initialization
4. Motors Initialization
5. Take image from USB camera
6. Image acquisition
7. Image processing
8. Segmentation
9. Location tracing
10. Send signals to robot assembly
11. Move robot in respective directions
12. Repeat steps 5 to 11
4. CONCLUSION
After the prototype implementation, it meets the use of AGVs in industrial fields, warehouses, medical fields and in dangerous working areas where humans cannot go.
REFERENCES
1. R.C. Arkin and R.R. Murphy,” Autonomous navigation in a manufacturing environment” IEEE Int. Conf. Robotics and Automation, 1997, pp. 2312-
2317.
2. K. Schilling, M. Mellado-Arteche, J. Garbajosa and R.
Mayerhofer, “Design of flexible Autonomous transport robots for industrial production”, in Proc. IEEE Int.Symp. Industrial Electronics (ISIE’97), vol. 3, New York, NY, 1997, pp. 791-796.
3. Y. Tanaka, T. Nishi and M. Inuiguchi, “Dynamic Optimization of simultaneous dispatching and conflict- free routing for automated guided vehicles”, J. Adv. Mech. Des., Syst., Manuf., vol.4, no.3, pp. 701-715,
2010.
4. N. Wu and M. Zhou. “Process vs resource-oriented Petri net modeling of Automated Manufacturing Systems”, Asian J. Control, vol.12, no.3, pp. 267-280. May 2010.s
IJSER © 2015 http://www.ijser.org