International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July-2013 33
ISSN 2229-5518
A Review on Wireless Embedded System for
Vision Guided Robot Arm for Object Sorting
C. Chandra Mouli and K. Nagabhushan Raju
Abstract— A robot arm/manipulator finds its applications in variety of areas to takeaway the processes which are repetitive, highly multifaceted and perilous, destructive or of high-precision in its nature. Robot manipulators are intended to use in object sorting applications because of its high accuracy and precision operation. Robot manipulator shows many advantages when it is networked and automated with an embedded system by providing the vision system. The present work gives the earlier, current developmental status and design considerations of existing object sorting systems, modeling and analysis of robot arm, embedded wireless control for robots, and image processing techniques for automated vision guided robot manipulators. The above said significant areas are covered in the review. The intention of the present work is to develop the feature research work in the field of wireless cooperative robot manipulators for object sorting system.
Index Terms— Autonomous, Embedded Control, Industrial Applications, Object Sorting System, Robot Arm, W ireless, Vision
System.
1 INTRODUCTION
—————————— ——————————
N this modern era the industrial robot arms are extensively adopted in several application areas where the work is complex, critical and repetitive. Industrial robot applica- tions includes pick and place operations of the objects to the desired location, assembling of spares in automobile indus- tries, process control operations in nuclear industries. The competitive edge of manufacturing industrial robot arm to outfit for multiple applications from welding, material han- dling and thermal spraying to painting and drilling is its de-
signing and programming.
The knowledge of robot comprises of three main engineer-
ing areas; electrical, mechanical and computing. The electrical
contains the sensing, amplifying, filtering, displaying and con-
trolling schemes; mechanical composes of mathematical mod-
eling of dynamics and kinematics of robot arm, computing
consists of another two important fields in the form of hard-
ware and software to design an electronic contorller through
programming for specified application in a time domain con-
straint which can also called as embedded system. Robots
show many advantages when it is networked using wireless communication, automated by providing vision and con- trolled through an embedded system.
Sorting systems remain essential in numerous areas with diverse applications such as in manufacturing industry, librar- ies, factories, warehouses, pharmacies, supermarkets etc. Gen- eral procedure of sorting system constitutes phases like searching the specified object depending on the nature of in- terest, focusing, reading and investigating, grasping and sort- ing them to the pre-programmed place depending upon the object category. This task is implementing in almost all places
————————————————
• C. Chandra Mouli is currently pursuing Doctor of Philosophy in Depart- ment of Instrumentation in Sri Krishnadevaraya University, A.P., INDIA, PH-+91-9160425798. E-mail: researchermouli@gmail.com
• K. Nagabhushan Raju is a professor in Department of Instrumentation in
Sri Krishnadevaraya University, A.P., INDIA, PH-08554-255745. E-mail:
knrbhushan@yahoo.com.
like libraries, pharmacies, warehouses, factories etc. In many sorting systems, the above steps are tied into one and cannot be separated clearly.
The main steps of proposed work for sorting application involves three important systems they are vision system, wire- less embedded control system and robot system. The vision system can reach the generic operations like searching the ob- ject, focusing and reading. A Personal Computer (PC) investi- gates and processes the data from vision system, transmits the joint angles of robot arm using wireless communication and the embedded control system receives the joint angles through wireless communication and form as robot controller. The robot sytem which is a robot arm manipulator performs the grasping and sorting operations.
The main aim of this paper is to deliver an outline of an embedded system based control for wireless networking robot arm for sorting systems in order to recognize and takeout the subsequent:
Design and development of an object sorting system using vision and embedded systems for robot experimentations and exercise circumstances related to the operation, pro- gramming, and control.
Examine the literature on object sorting sytems which in- cludes the research on mathematical modeling of the ro- bot arm, wireless communication system, vision system and embedded system based control.
Implement theoretical and experimental assessment on the robot arm procedures and control logic, to progress the complete understanding of robot arm manipualtors.
2 LITERATURE RIVIEW
The present work is aimed on providing the survey and design aspects of wireless object sorting system which com- prises of two stations, tramsmission station and receiption station. The transmission station is a Personal Computer (PC) with an input device (CCD/CMOS Sensor) and a wireless transmission module (Bluetooth / WiFi / Zigbee). The input
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July-2013 34
ISSN 2229-5518
device captures the image of the object on the assembly line and the image data will sent to PC for image processinng to find out the genre of the object. Image processing techniques identifies the genre of the object from the stored data base. Depending upon the object type and robot arm position, PC finds the solution for the forward and inverse kinematic prob- lems of robot arm for pick and place operation of the object to its dedicated container. PC calculates the position and orienta- tion of the robot arm’s end effector using forward kinematics and joint angles by using inverse kinematics to pick the object. Calculated joint angles are transmitted to the receiver station by using wireless communication.
Receiption station is an embedded system with a wireless network module and the robot arm. Wireless module is meant to receive the joint angles from the transmission station. The received joint angles is converted into Pulse Width Modula- tion (PWM) signals to control the robot arm. Since robot arm is designed by using DC servo motors, no feedback sensors are required to find out the position of the motor, because PWM signal will decide the position of the servo motor as well as robot arm.
Since, the above work constitutes vision system, robot arm modeling and wireless embedded control for object sorting, literature review was extensively done on the above said are- as.
The first object sorting system was designed by Robert G.
Husome and his associates, it is a tomato sorter aimed at re-
moving the culls, e.g. green tomatoes from the good and red
tomatoes [1]. Joseph R. Perkins designed an autonomous sort-
ing system which has an inclined surface along which objects
are sorted out through gravity [2]. P. Dario, discusses object
characterization and sorting using active touch through mul-
tiple sensors where the information from the sensors are pro-
cessed in parallel for exploratory parameters like contact force,
direction, velocity to sort a specified object in a given set [10].
Yang Tao discusses the advantage of image processing in sort-
ing applications by implementing a sorting system based on the hue extraction of an image captured from the image sensor and image processor performs a color transformation to obtain a single composite hue value for each object or piece of fruit to
be sorted [3]. Thomas C. Pearson describes the object sorting system based on video image of an object [4]. An impulsive manipulation and air floating object sorting device was devel- oped using computer simulation by hirai [13].
Yuji Matsumoto in his invention, sorting objects based on physical characteristics, data from the sensors regarding to the object tobe detected is stored in the data storage unit and the object is determined by a high-speed detecting process [5]. Tao wang and ong zhang designed an algorithm which is capable of separation of objects of two different classes using simula- tion tools [15]. The problem of collective sorting was discussed with multiple robots under simple reactive control where ob- jects of different classes are separated into clusters and each cluster contains objects of only one class [17]. David Salomon Garcia palmero simulated object recognition and sorting tech- nique using virtual Cartesian robot with artificial intelligence and it is capable of recognizing 26 Spanish alphabets [14]. Rai- han Ferdous Sajal and associates designed an efficient ma-
chine vision algorithm for real time image analysis and recog- nition of different features of Bangladeshi bank notes by using an automatic banknotes sorting system [25]. A material sorting system was developed to overcome the drawbacks of the ex- isting sorting system (based on barcode), the new intelligent sorting system is based on intelligent recognition algorithm which acts as decision-maker [26]. A vision based robot sys- tem was developed for 3D pose estimation and picking of the objects in which a video camera surrounded by eight flashes is used to capture the images and CAD tool is used to find the edges of the object using a fully projective formulation [ACB98] of Lowe’s model based pose estimation algorithm [21]. Mohamad Bdiwi discusses about the control system and vision algorithms for library automation and book sorting us- ing integrated vision/force robot control [11]. The aspects of top-down, bottom-up attention and foveated attention were discussed for robotic object grasping using stereo-based vision system frame work [22]. Roland Szabo implemented an object sorting system based on color using robot arm where web cam is used to identify the color of the object and robot arm is used to place the object in appropriate place [12].
3 EMBEDDED SYSTEM BASED CONTROL FOR WIRELESS AUTONOMOUS VISION GUIDED ROBOT MANIPULATOR FOR OBJECT SORTING SYSTEM - DESIGN ASPECTS
The practical design aspects and approaches intended to develop the projected wireless embedded system for autono- mous vision guided robot manipulator for object sorting sys- tem is explained in this section.
3.1 Description of Object Sorting System
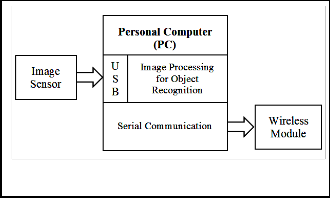
Figure 1 shows the block diagram of the transmission sta- tion of the object sorting system. The transmission station son- sists of a PC with USB, Serial Communication and software development tool to organize the work. The image sensor is a CMOS sensor which is capable of capturing static images and sequence of images to avi format. This CMOS sensor is con- nected to the USB of the PC to process the static images for object recognition.
Fig. 1. Transmission Station of Object Sorting System.
A software development tool like LabVIEW/Matlab is used for image processing and to solve the forward and inverse kinematic problem by producing the joint angles of the robot
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July-2013 35
ISSN 2229-5518
arm using Denavit Hartenberg (DH) convention method. Seri- al communication is used to connect with the wireless net- work which works with RS232 standards. This serial commu- nication is used to transmit the joint angles of the robot arm which is calculated by the software development tool. Wire- less networks used to transmit the data from one machine to
An image A (size WxH) and image P (size wxh), is the re- sult of the image M (size (W-w+1) x (H-h+1)), where each pix- el M(x, y) indicates the probability that the rectangle [x,y]- [x+w-1,y+h-1] of A contains the Pattern. By using the above equations the vision assistant carries out the pattern matching algorithm and identifies the desired object in the image.
another machine is discussed in the embedded wireless con- trol section.
w h
M ( x, y )
a =0 b=0
( P(a, b) − A( x + a, y+ b) )2
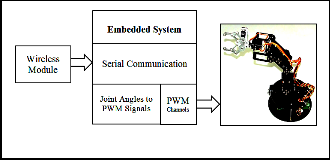
Figure 2 shows the receiver station of the object sorting sys- tem with an embedded system, wireless network module and robot arm.The controller used in the present work is Ad- vanced RISC Machine (ARM) which is capable of driving the servo with its PWM channels provided on-chip. The ARM7 processor is used for the design and development of instru- mentation system to control the robot arm manipulator de- pending upon the joint angles received from the PC. Due to their robust packaging for industrial applications and low power consumption LPC214x are ideal for applications where miniaturization is a key requirement, handheld devices such as access control, portable field measuring devices.
The image M is defined by the difference function between
the segments of the image:
3.3 Robot Arm Modeling
To express the performance of a physical system in many circumstances an analytical model is used. Analytical study of the motion of a robot manipulator is called robot kinematics. Modeling, analysis and implementation of serial robot arm implicates the study of its kinematic behavior. Modeling of robot kinematics was divided into two problems one is for- ward kinematics and second is inverse kinematics. The prob- lem of solving the cartesian position and orientation of a mechanism which gives the knowledge of the kinematic struc- ture and joint coordinates is called forward kinematics. The problem of computing the joint variables through the position and orientation of robot’s end-effector is called inverse kine- matics (IK) [16]. Many researchers have evaluated and execut- ed these problems in different scenarios using different tools and devices.
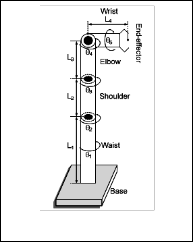
Fig. 2. Receiver Station of Object Sorting System.
3.2 Vision System for Object Recognition
Ana Brandusa Pavel and Catalin Buiu discusses about an embedded artificial vision system for an autonomous robot which is capable of finding objects, identifying them if they are known to the robot or store them in an object library if perceived for the first time [20]. Object detection was done by various electronic devices/components of which CMOS active pixel image sensors graps its attention and popularity. An image sensor is a device that converts an optical image into an electronic signal. The CMOS sensors are main part of technol- ogy in digital imaging. The acquisition system requires a pho- tosensitive matrix arrangement from the image sensor as first light sensitive element. The photosensitive device provides an electrical output proportional to the luminous intensity that obtains from the input. The resolution can be determined by the total number of elements used in the photosensitive sys- tem. An analog-to-digital converter (ADC) is required for sampling and discretizing the electric signal generated by the photosensitive elements to store in the memory. The number of bits used to store the data of the image defines the resolu- tion of the image.
The objects can be identified with various genres like pat- tern, geometric dimensions, length, color etc. The first step to recognize the object of a static image from the CMOS image sensor is pattern recognition. The vision assistant was used for the pattern (object) recognition.
Fig. 4. Kinematic Model of Robot
A
The detailed design principles of many components of ro- bot for example manipulators, end effectors are dealt in the text books [6], [7], [8]. Raza Ul Islam and associates designed and developed the forward and inverse kinematic model for a vertical articulated robot arm to simulate the industrial appli- cations like pick and place, sorting and other object manipula- tion tasks using image processing techniques to make the ro- bot autonomous [9].
3.3.1 Forward Kinematic Model
Kinematic problem of a serial robot arm was carried out by using two methods they are, Denavit-Hartenberg (DH) con- vention and Dual Quaternion approach. DH convention is the classic method used to determine the position and orientation
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July-2013 36
ISSN 2229-5518
of the end effector of the robot in robotics community arm where homogeneous transformation matrix is adopted for calculations and Dual Quaternion algebra was composed of 8
Where
A = L S
+ L S
+ L C
components to represent the posture of a rigid body by a min- imal form using general algebra methods [23].
The two approaches are organized for modeling serial ma- nipulators. Dual quaternion gives the rotation and translation in a compressed form of transformation vector, simultaneous- ly and the orientation of a body is represented nine elements in homogenous transformations, the dual quaternions reduce the number of elements to four [24]. Though quaternion con- stitutes an enhanced technique, it was not used as much as DH method in robotics community. DH method has become the standard method for describing robot kinematics. Hence, DH conventional method is proposed to use for robot arm modeling.
2 2 3 23 4 234
B = L1 + L2C2 + L + C23 − L4 S234
Equation (2) represents the resultant matrix in which the
3X3 matrix comprising of first three rows and first three col- umns is the rotation and the last column gives the position (x,y,z) of the robot end effector w.r.t. its base.
3.3.2 Inverse Kinematic Model
The practical robotic systems found its standard applica- tions by implementing IK model. IK model calculates the joint angles to the desired position and orientation. Analytical method was followed to develop IK model. This method de- termines the correct joint angles for any object in the work- space of the robot arm. The first four joint angles i.e. waist (θ1 ), shoulder (θ2 ), elbow (θ3 ) and tool pitch (θ4 ) calculated using this method while tool roll (θ5 ) is straight away given by the desired orientation for object manipulation.
Since transformation encompasses rotation as well as trans- lation, the general form of the transformation matrix from tool to base is given by (3).
Base
nx
n
ox ax
oy a y
px
p y
Tool T = n o a p
(3)
z z z z
0 0 0 1
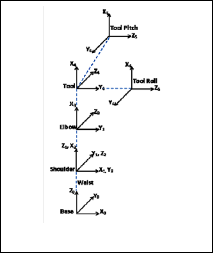
Fig. 5. Orthonormal Coordinate System.
A 6DOF robot arm modeling was discussed as an example in the present work. The basic kinematic model of the robotic arm is shown in Figure 4. DH mechanism works with quad- ruple (1), which represents twist angle, link length, link offset
Where the first 3x3 matrix and (Px , Py , Pz ) representing the rotation and the translation of end-effector w.r.t base of the robot in an IK problem.
and joint angle respectively. The pictorial representation of DH convention method of the manipulator in an orthonormal coordinate system is shown in Figure 5.
θ = A tan 2( p , p )
s234 = c1ax + s1a y
(4)
{ai −1 , ai −1 , di ,θi }
(1)
c234
= az
By means of the general form of the transformation matrix
for each link (expressing joint i in its previous neighboring
joint i-1) derived in [6], the equivalent transformation matrices
θ = A tan 2( s , c )
for each link of the robotic arm have been written. Depending
(c p
+ s p
+ l s
)2 + (p − l + l
c )2 − l 2 − l 2
on the compound transformation property, the end-effector of the robot with respect to its base can be evaluated by multiply- ing the individual transformation matrices to get the overall

c3 =
1 y 4 234 z 1 4 234 2 3

2l2l3
2
matrix.
s3 = ±
1 − c3
CC S
+ S S
−C S S
+ S C CC C A
θ = A tan 2( s , c )
(5)
1 5 234 1 5 1 234 5 1 5 1 234 1
0
(c p
+ s p
+ l s
)(c l
+ l ) − ( p
− l + l c
)s l

T = − SC C
− C S SC C
+ C C SC S A
(2)
1 x 1 y
4 234 3 3 2
z 1 4 234 3 3
6 1 5 234 1 5 1 234 5 1 5 1 234 1 c =
2 2 2 2
(c l
+ l )
+ s l
C C
−C S
− S B
3 3 2 3 3
234 5 234 5 234
0 0 0 1
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July-2013 37
ISSN 2229-5518
(c p + s p + l s )s l + ( p − l + l c )(c l + l )
s = − 1 x 1 y 4 234 3 3 z 1 4 234 3 3 2
sumes low power, data transmission vary from 20 KBPS in 868

2 (c l
+ l )2 + s 2l 2
MHz frequency band to 250 KBPS in 2.4Ghz frequency band
3 3 2 3 3
θ = A tan 2( s , c )
(6)
and covers the distance over 100 meters.
Although there are various wireless technologies that are
used to control the robot manipulator, but each technology
have the advantages and disadvantages. Bluetooth technology
θ = θ
− θ − θ
(7)
implementation cost on small scale is inexpensive. But devel-
4 234 2 3
Equations (4), (5), (6) and (7) give the joint angles θ1 , θ3 , θ2 and θ4 respectively for IK model, after intensive mathematical computations. These equations express the required joint an- gles in terms of given coefficients of (3).
3.4 Wireless Embedded Based Control
In recent years, advancement of electronics, embedded wireless technology has given rise to a large number of emerg- ing industrial applilcations. The design aspect of an embedded control system comprises of four features, i.e., system struc- ture, functions, hardware, and software design. System struc- ture represents the overall system design concepts and re- quired physical components. Functions are number of input and output parameters used to measure and control. The physical components integration for an application gives the hardware design and the source code which performs the re- quired task along with the hardware is called the software design. The detailed description of system structure and fuctions were discussed in the earlier sections.
To develop the embedded robot control a controller based on the combination of advanced RISC microprocessor (ARM) is required [18]. Depending upon the combination of ad- vanced RISC microprocessor (ARM), DSP and ARM-Linux, a WiFi based robot arm control system was designed in [19]. MoGuan proved that ARM processor with the features of mul- ti-parameter execution, multi-level monitoring and network- ing, it is suitable for a wide range of network applications [27].
Several embedded systems are equipped with wireless technology such as Bluetooth, WiFi, and Zigbee etc. Wireless technologies like Bluetooth and IrDA standards deliver the capability to fortify the local wireless network and it som- municates with a device in a range of about 10 meters and supports both voice and data communications with broad- band of 1MBPS as in [28]. WiFi or WLAN (Wireless Local Area Networks) is a wireless network based on a series of specifica- tions from the Institute of Electrical and Electronics Engineers (IEEE) called 802.11. The unlicensed radio frequency in the range of 2.4GHz is using by WiFi. There are several versions of WiFi for different applications:
• 802.11a (offering transmission speeds of 24mbps to
54mbps).
• 802.11b (6mbps to 11mbps) and 802.11g (24mbps to 54
mbps).
• 802.11n (50mbps to 100mbps).
As per the IEEE 802.15.4 standard for low data rates, wire-
less Personal Area Networks (PAN) is extensively considered
as one of the technology for wireless sensor networks [29]. As of now ZigBee is the widespread among these. ZigBee is used to create a personal area network which is built from small, low-power digital radios for high level communication. It con-
oper for this application face a bound rate problem which is both microcontroller and Bluetooth devices are running at different bound rate. WiFi admittance needs high data rates (to enable large amounts of data to be uploaded and down- loaded) and is able to accept minor connection delays. ZigBee specification is proposed for the present work because of its simplicity and less expensive over other WPANs, such as Bluetooth or WiFi.
4 DEVELOPMENT METHODOLOGY
The development of the present work can be scheduled in segments as described below. Primarily system modelling could be done, followed by controller design in software de- velopemnt tool. Confirmation by simulation is approved at each and every phase. Next, the embedded control system is implemented and finally the complete system is validated and tested by experimentations.
4.1 Segment – I
• Abstract design of embedded system and modeling of robot arm.
• Graphical user interface design for interaction.
• Integration of robot manipulator with the embedded con-
trol and vision systems.
4.2 Segment – II
• Understanding of embedded control for wireless network- ing robot manipulators and integration of the systems.
• Experimental examination and verification of user inter- face systems through testing.
5 EXPERIMENTAL VERIFICATION
The following steps need to be planned to estimate the total system performance.
• Direct and inverse kinematics problems.
• Study of different controllers and the effects of control
parameters on individual robot manipulators.
• Experiments on vision systems to identify the object.
• Experiments of different wireless technologies to choose
one for the application.
• Experiments on wireless networking with the Vision sys-
tem.
• Experiments on wireless embedded control of robot arm.
6 CONCLUSION
The present work when implemented provide good re- search knowledge on vision systems, robot arm modeling, wireless technologies and emebedded based control. The
IJSER © 2013 http://www.ijser.org
International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July-2013 38
ISSN 2229-5518
hardware and software implementation provides an easier access to exercise robot manipulation using the functionalities and programming abilities of the real robots for mounting different industrial applications. Therefore, this paper pro- vides an overview for a researcher interested in the field of embedded systems and robotics with the status, and a broad review of accessible literature and an outline on the basic module functionalities.
REFERENCES
[1] Robert G. Husome, Ron J. Fleming, Ron E. Swanson, “Color Sorting
System”, U.S. Patent 4 131 540, Dec. 26th, 1978.
[2] Joseph R. Perkins, L. Woodland, “Mechanical Rejection System for Au- tomatic Sorting Machines”, U.S. Patent 4 314 645, Feb 9, 1982.
[3] Yang Tao, “Method and Apparatus for Sorting Objects by Color”, U.S.
Patent 5 339 963, Aug 23, 1994.
[4] Thomas C. Pearson, “Machine Vision Apparatus and Method for Sorting
Object”, U.S. Patent 5 703 784, Dec 30, 1997.
[5] Yuji Matsumoto, Satoshi Watanabe, Hiroshi Fukuta, Masato Suda, Yoshikazu Tagami, Kei Takizawa, Shinya Watanabe, “Sorting Objects Based on Physical Characteristics”, U.S. Patent 6 539 342, Mar 25, 2003.
[6] John J Craig, Introduction to Robotics – Mechanics and Control, Third
Edition, Pearson Education, 2009.
[7] Robert J Schilling, Fundamentals of Robotics – Analysis and Control, Prentice Hall of India Ltd., 2007.
[8] Chris Morgan, Robots – Planning and Implementation, IFS Publications. [9] Islam, R.U.; Iqbal, J.; Manzoor, S.; Khalid, A.; Khan, S., "An autono-
mous image-guided robotic system simulating industrial applica- tions," System of Systems Engineering (SoSE), 2012 7th International Conference, pp.344-349, 16-19 July 2012, doi:
10.1109/SYSoSE.2012.6384195.
[10] Dario, P.; Allotta, B.; Bergamasco, M.; Buttazzo, G.; Sabatini, A., "Ob- ject characterization and sorting by active touch," Intelligent Robots and Systems '91. 'Intelligence for Mechanical Systems, Proceedings IROS
'91. IEEE/RSJ International Workshop, pp.1353-1356 vol.3, 3-5 Nov
1991.doi: 10.1109/IROS.1991.174693.
[11] Bdiwi, M.; Suchy, J., "Robot control system with integrated vision/force feed- back for automated sorting system," Technologies for Practical Robot Applications (TePRA), 2012 IEEE International Conference, pp.31,36, 23-24 April 2012, doi:
10.1109/TePRA.2012.6215650.
[12] Szabo, R.; Lie, I., "Automated colored object sorting application for robotic arms," Electronics and Telecommunications (ISETC), 2012 10th International Symposium , pp.95,98, 15-16 Nov. 2012, doi:
10.1109/ISETC.2012.6408119.
[13] Hirai, S.; Niwa, M.; Kawamura, S., "Development of impulsive object sorting device with air floating," Robotics and Automation, 1999. Pro- ceedings. 1999 IEEE International Conference, vol.4, pp.3065,3070 vol.4,
1999, doi: 10.1109/ROBOT.1999.774064.
[14] Palmero, D.S.G.; Perez, A.A.; Ortiz, M.I.M.; Amaro, F.J.; Henriquez, F.R., "Object Recognition and Sorting By Using a Virtual Cartesian Robot with Artificial Vision," Electronics, Communications and Comput- ers, 2005. CONIELECOMP 2005. Proceedings. 15th International Confer- ence, pp.201,206, 28-02 Feb. 2005, doi: 10.1109/CONIEL.2005.54
[15] Tao Wang; Hong Zhang, "Collective Sorting with Multiple Robots,"
Robotics and Biomimetics, 2004. ROBIO 2004. IEEE International Confer- ence, pp.716-720, 22-26 Aug. 2004, doi: 10.1109/ROBIO.2004.1521869
[16] Jamshed Iqbal, Raza ul Islam, and Hamza Khan, “Modeling and
Analysis of a 6 DOF Robotic Arm Manipulator”, Canadian Journal
on Electrical and Electronics Engineering Vol. 3, No. 6, pp. 300-306, July 2012.
[17] Verret, S.; Hong Zhang; Meng, M. Q-H, "Collective sorting with local communication," Intelligent Robots and Systems, 2004. (IROS 2004). Proceedings. 2004 IEEE/RSJ International Conference, vol.3, pp.2687-
2692 vol.3, 28 Sept.-2 Oct. 2004. doi: 10.1109/IROS.2004.1389814
[18] Shouqian Yu; Weihai Chen; Li Li; Jianglei Qin, "Development of ARM-based Embedded System for Robot Applications," Robotics, Au- tomation and Mechatronics, 2006 IEEE Conference, pp.1-6, Dec. 2006, doi: 10.1109/RAMECH.2006.252739.
[19] Vaishak N. L, C.G. Ram Chandra, “Embedded Robot Control System Based On an Embedded Operating System, the Combination of Ad- vanced RISC Microprocessor (ARM), DSP and ARM Linux”, Interna- tional Journal of Engineering and Innovative Technology (IJEIT), Vol. 2, Issue 6,pp. 143 – 147, December 2012, ISSN: 2277-3754.
[20] Ana Brandusa Pavel and Catalin Buiu,”Development of an embed- ded system Artificial Vision System for an Autonomous Robot”, In- ternational journal of Innovative Computing, Information and Control, Vol. 7, No. 2, pp. 745-762, Feb 2011, ICIC international @2011 ISSN
1349-4198.
[21] Amit Agrawal, Yu Sun, John Barnwell, Ramesh Raskar,”Vision Guided Robot System for Picking Objects By Casting Shadows”, In- ternational Journal of Robotics Research, February 2010 vol. 29 no. 2-
3, pp.155-173.
[22] Ding Chengjun, Yan Bingsen and Duan Ping,”The Remote Control of Mobile Robot Based on Embedded Technology”, 2011 Third Interna- tional Conference on Measuring Technology and Mechatronics Automation, Jan 06-07 2011, vol. 3, pp.907-910.
[23] Aspragathos N.A. andDimitros J.K. “Acomparative study of
threemethods for robot kinematics”, IEEE Transactions on Systems, man, and Cybernetics—part b: Cybernetics, vol. 28, no. 2, pp.135–145, APRIL 1998.
[24] Luiz Radavelli, Roberto Simoni, Edson Roberto De Pieri and Daniel Martins, “A Comparative Study of The Kinematics of Robots Manip- ulators by Denavit-Hartenberg And Dual Quaternion”, Mecánica Computacional Vol XXXI, pp. 2833-2848, Salta, Argentina, 13-16
Noviembre 2012.
[25] Raihan Ferdous Sajal, Mohammed Kamruzzaman, Faruq Ahmed Jewel, “A Machine Vision Based Automatic System for Real Time Recognition and Sorting of Bangladeshi Bank Notes”, Proceedings of
11th International Conference on Computer and Information Technology
(ICCIT 2008), 25-27 December, 2008, pp.533-535.
[26] Yao Zhi-ying, Wu yue, Wang Cheng-Lin,”Research on intelligent sorting system based on machine vision”, IEEE Conference ,2009 Se- cond International Conference on Intelligent Computation Technology and Automation, 2009 pp. 460-463.
[27] Ricardo Tesoriero, José A. Gallud, María D. Lozano, Víctor M. R.
Penichet “Tracking Autonomous Entities using RFID Technology”
IEEE Transactions on Consumer Electronics, Vol. 55, No. 2, MAY 2009 [28] Mo Guan, Minghai Gu, “Design And Implementation Of An Embed-
ded Web Server Based On ARM”, pp. 612-615, 2010.
[29] Manoj Kumar, “Zigbee: The Low Data Rate Wireless Technolgy for Ad-Hoc and Sensor Networks”, NCCI 2010 -National Conference on Computational Instrumentation CSIO, Chandigarh, INDIA, 19-20
March 2010.
IJSER © 2013 http://www.ijser.org